




按照科學家們(men) 的話說,就是當對光刺激做出反應產(chan) 生至多0.56千帕力量的光控環形肌肉執行器被納入到一個(ge) 3D打印的生物機器骨骼的框架中的時候,它可以驅動後者方向性運動和旋轉轉向,這為(wei) 未來開發能實時對環境信號做出響應的動態生物機器提供了一個(ge) 樣板。
這項研究由伊利諾伊大學生物工程的負責人Rashid Bashir領導,該研究結果已經發表在了近期出版的《Proceedings of the National Academy of Sciences》上。
“光是以一種非侵入性的方式來控製這些機器的。”Bashir說:“這給了我們(men) 的設計和機器人的運動帶來了靈活性。我們(men) 所要完成最低目標是生物係統的正向設計,我們(men) 認為(wei) 光控製是實現這一目標的重要一步。”
在此之前,Bashir的團隊已經證明了可以通過電場來激活生物機器人,但是Bashir說電會(hui) 對生物環境造成不良的副作用,而且無法通過對肌肉的不同區域進行選擇性刺激來控製機器人。而這種新的光刺激技術造成的傷(shang) 害更小,而且研究人員可以控製生物機器人向不同的方向運動。這種生物機器人會(hui) 轉身朝向光刺激的方向走,Bashir說。
研究人員首先在小鼠肌肉細胞係的基礎上生長出肌肉環,這種肌肉細胞被加入了一種基因,導致一定波長的藍色光能夠刺激肌肉收縮,這是一種被稱為(wei) 光遺傳(chuan) 學的技術。這種肌肉環被繞在了3D打印而成的柔性框架上,這些架子的長度從(cong) 7毫米到2厘米不等。
“這些骨骼肌環被我們(men) 的工程師們(men) 製作成了環形或者類似橡皮筋的形狀,因為(wei) 我們(men) 希望它們(men) 是模塊化的。”該論文的第一作者、研究生Ritu Raman說。“這意味著我們(men) 可以把它們(men) 作為(wei) 構建模塊,並結合3D打印骨架製作成可用於(yu) 各種應用的生物機器人。”
此外除了模塊化設計之外,薄薄的肌肉環也使得光線和養(yang) 分很容易擴散到組織的各個(ge) 方麵。這與(yu) 早期生物機器人的設計是相反的,那個(ge) 時候往往會(hui) 使用厚條狀的肌肉組織來圍繞著骨骼生長。
研究人員們(men) 嚐試了各種尺寸和形狀骨架來找到最適宜運動的配置。此外,他們(men) 還每天鍛煉肌肉環,即使用閃光燈來觸發肌肉,使它們(men) 更強壯,這樣它們(men) 的每次收縮會(hui) 使機器人移動得更遠。
“這是一個(ge) 非常靈活的設計。”Bashir說:“使用這些(肌肉)環,我們(men) 可以連接3D打印骨架上的任何兩(liang) 個(ge) 關(guan) 節或者鉸鏈。我們(men) 可以有多個(ge) 腿和多個(ge) 環。使用光,我們(men) 可以控製它們(men) 移動的方向。人們(men) 現在可以用它打造更加高階的機器人係統。”

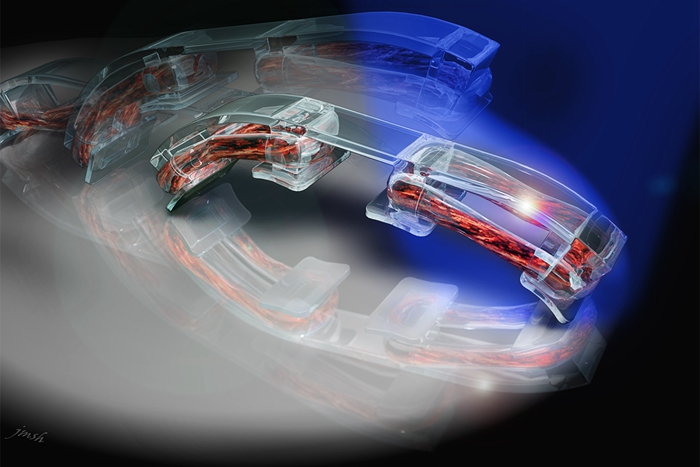
微型生物機器人有一個(ge) 肌肉環圍繞著一個(ge) 柔軟的3D打印骨架
據了解,這項研究實際上是集成細胞係統的應急行為(wei) (EBICS,Emergent Behaviors of Integrated Cellular Systems)項目的一部分,該項目由美國國家科學基金(NSF)資助。在2015年秋季,EBICS項目就接受了NSF總額高達2500萬(wan) 美元,為(wei) 其5年的研究資助,使得Bashir和他的同事們(men) 可以繼續開發生物機器人技術在診斷、醫學、遙感等領域的各種應用。

轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀




























 關注我們
關注我們