




摘要:基於(yu) MSP430F149單片機設計了一種三自由度轉台係統。在該係統中,利用旋轉編碼器的信息反饋,通過對電機的閉環控製,使三自由度轉台能夠模擬飛機的飛行姿態。實驗證明:係統能平穩、精確地按照任意給定的位置信息轉動,動態性能良好,係統穩定性和抗幹擾能力強。
0 引言
三自由度飛機飛行姿態模擬實驗台是集機械技術、控製技術和傳(chuan) 感器檢測技術、計算機技術於(yu) 一體(ti) 的綜合性測試設備。它作為(wei) 一種空間運動機構是飛機進行動態性能測試的關(guan) 鍵設備,主要用於(yu) 模擬飛機的運動姿態,為(wei) 飛機提供一個(ge) 非常接近實際的模擬環境,在模擬條件下對飛機的飛行姿態進行實驗研究和性能考察,在國防和民用中都有很高的應用價(jia) 值。
本文基於(yu) MSP430控製核心設計了一種三自由度模擬實驗台,並完成了給定的任務要求。
1 體(ti) 統總體(ti) 方案
該係統主要由MSP430控製核心、電源管理模塊、電機控製模塊以及無線通信模塊組成,其結構框圖如圖1所示。
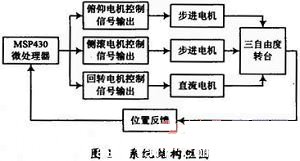
轉台的實時位置由旋轉編碼器反饋送入微處理器進行處理。步進電機采用PID算法進行調節,而直流無刷電機采用模糊控製算法。軟件設計中實時采集編碼器的反饋信息,實現整個(ge) 係統的閉環控製。
2 係統硬件設計
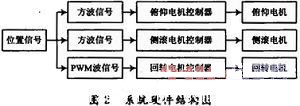
係統的硬件主要包括:主控電路、電源管理電路、電機驅動器和無線通信電路幾部分,其係統結構如圖2所示。
2.1 MSP430主控電路
係統的核心控製采用TI公司的MSP430係列單片機MSP430F149,其主要特點是高度的功能集成,易於(yu) 擴展,內(nei) 部集成看門狗定時器、且自帶捕獲/比較寄存器的16位定時器Timer_A和Timer_B支持PWM輸出功能以及具有超低功耗等特點,片上集成60 KB的FLASH存儲(chu) 器和2 KB的RAM同時提供256 B的信息FLASH,64腳方形扁平封裝。此單片機還可以串行在線編程,無需外部編程電壓。係統I/O口具體(ti) 分配如下:P1口用於(yu) 接收旋轉編碼器的反饋信號;P2口為(wei) 中斷口;P4用於(yu) 驅動直流無刷電機的PWM信號輸出;P5口用於(yu) 驅動步進電機的方波信號輸出;P6用於(yu) 電機驅動器的控製信號輸出。
2.2 電源管理電路
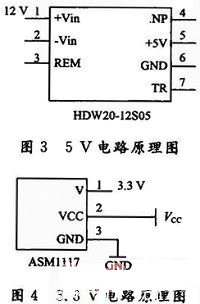
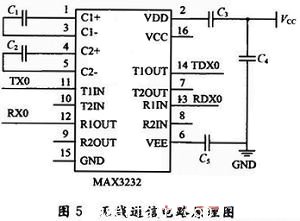
整個(ge) 係統包含3.3 V,5 V,12 V,24 V四個(ge) 電壓環境。其中,3.3 V給單片機係統供電,5 V給旋轉編碼器供電,12 V直接由交直流變壓器引出給驅動電路供電,24 V直接由交直流變壓器引出給電機供電。5 V由12 V通過HDW20-12S05電源模塊得到,如圖3所示。3.3 V由5 V通過AMS1117芯片得到,電路如圖4所示。
2.3 電機驅動器
步進電機驅動器采用2605AD驅動器。2605AD為(wei) 一款等角度恒力距細分型驅動器,驅動電壓DC 24~60 V,適配電流在5.0 A以下、外徑為(wei) 57~86 mm的各種型號的二相混合式步進電機。該驅動器內(nei) 部采用類似伺服控製原理的電路,此電路可以使電機低速運行平穩,幾乎沒有震動和噪音,電機在高速時力矩大,定位精度最高可達25 600步/轉。
直流無刷電機采用控製驅動器,該驅動器為(wei) 閉環速度型控製器,采用IGBT和MOS功率器,利用直流無刷電機的霍爾信號進行倍頻後進行閉環速度控製,控製環節沒有PID速度調節器,係統控製穩定可靠,尤其是在低速下總能達到最大轉矩,速度控製範圍為(wei) 150r/s~額定轉速。
2.4 無線通信電路
通過串口驅動電路中的RS 232電平轉換芯片,可以實現單片機和PC機之間的通信,建立人-機對話活動的通道。桑銳公司生產(chan) 的SRWF-1型無線通信模塊工作性能穩定,體(ti) 積小便於(yu) 安裝。利用MAX3232芯片,能夠完成TTL電平和RS 232電平之間的轉換,實現通信模塊與(yu) PC機進行串口通信。其電路原理圖如圖5所示。
3 控製策略
3.1 步進電機控製策略
常規PID控製器具有算法簡單、穩定性好、可靠性高的特點,價(jia) 值設計容易、適應麵寬,是過程控製中應用最廣泛的一類基本控製器。但在過程的啟動、結束或大幅度增減設定時,短時間內(nei) 係統輸出有很大的偏差,會(hui) 造成PID運算的積分積累,致使控製量超過執行機構可能允許的最大動作範圍對應的極限控製量,引起係統較大的超調,甚至引起係統較大的振蕩,這在生產(chan) 中是絕對不允許的。積分分離控製室當被控製量與(yu) 設定值偏差較大時,取消積分作用;當被控量接近給定值時,引入積分控製,以便消除靜差,提高控製精度。根據三自由度轉台的實際情況,在積分分離PID控製算法的基礎上進行算法的改進,結合增量式PID控製算法進行電機的控製,實驗得到了很好的控製效果。
3.2 直流無刷電機控製策略
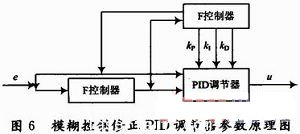
模糊PID控製器的原理是把輸入PID調節器的偏差e和偏差變化率ec同時輸入到模糊控製器中。圖中的F控製器實際上是由三個(ge) 分模糊控製器組成的,分別對三個(ge) 參數進行調節,然後分別經過模糊化、近似推理和清晰化後,把得出的修正量分別輸入PID調節器中,對三個(ge) 係數進行實時在線修正,從(cong) 而使被控對象具有良好的動態和靜態性能。
4 結論
本文以MsP430F149單片機為(wei) 主控芯片,步進電機和直流無刷電機為(wei) 驅動元件,通過軟件編程,製作了一台精度相對較高的三自由度轉台。經過對轉台的旋轉控製,證明轉台能平穩、精確地按照任意給定的位置信息轉動,動態性能良好,係統穩定性和抗幹擾能力強。
三自由度轉台不僅(jin) 在航空、航天和航海等國防軍(jun) 事領域中有很高的應用價(jia) 值,而且在民用領域也有非常廣泛的應用前景,但是要達到人們(men) 要求的高精度、高智能化還有很長的路要走,需要堅持不懈的探索和研究。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們