





諾基亞(ya) 下一代HERE地圖技術:精確度大提升
諾基亞(ya) 公司目前需要麵對一個(ge) 問題,那就是,“我到底是誰?!”好吧,我們(men) 暫且先不談他們(men) 手機業(ye) 務被微軟收購這件事,今天要說的,貌似能讓諾基亞(ya) 再爺們(men) 兒(er) 硬一次,諾基亞(ya) 旗下的HERE地圖團隊正在構建下一代地圖數據,他們(men) 把這款全新的地圖產(chan) 品稱為(wei) “HD Map”,也是給了如日中天的穀歌地圖一個(ge) 下馬威。

諾基亞(ya) 染指導航領域已經七年有餘(yu) 了,他們(men) 最初是從(cong) 收購地圖數據公司NAVTEQ開始的,不過就這麽(me) 一個(ge) 收購交易,卻被雙方拖拖拉拉了十多年,直到2011年,諾基亞(ya) 才徹底搞定了對NAVTEQ公司的整體(ti) 收購。次年,諾基亞(ya) 就創立了HERE地圖品牌,當然,這個(ge) 品牌出自於(yu) 諾基亞(ya) 公司之前廣為(wei) 人知的位置與(yu) 電子商務部(Nokia Location&Commerce)。實際上,HERE地圖已經廣泛用於(yu) Windows係統和手機,而且Bing Maps也使用了HERE引擎,此外,許多汽車OEM製造商開發的車載導航係統也采用了HERE地圖。
事實上,如果你使用HERE這款地圖就會(hui) 發現,產(chan) 品還是非常簡單直觀的。如下圖所示,地圖上的行車道和馬路邊緣都是圖形化的,而且在各個(ge) 交叉路口都設有節點,整個(ge) 路線是由各節點連接集合而成,地圖上會(hui) 顯示許多道路屬性的細節數據,包括該道路允許的最大車速,車道大小,車道數量,以及車道間是否有間隔,等等。

上述很多功能對於(yu) 一個(ge) 基本導航地圖來說以及足夠了,不過HERE希望能夠再領先一步,他們(men) 意識到自己必須要開發出下一代地圖產(chan) 品,這樣不僅(jin) 能提供基於(yu) 特定地理位置的服務,而且還能應用在自動駕駛汽車上麵。
HERE互聯駕駛部副總裁Ogi Redzic認為(wei) ,如今的汽車地圖能夠滿足導航需要,但如果是未來的自動駕駛汽車,那麽(me) 就需要一種完全不同的地圖,而這,恰恰是HD Map的方向。
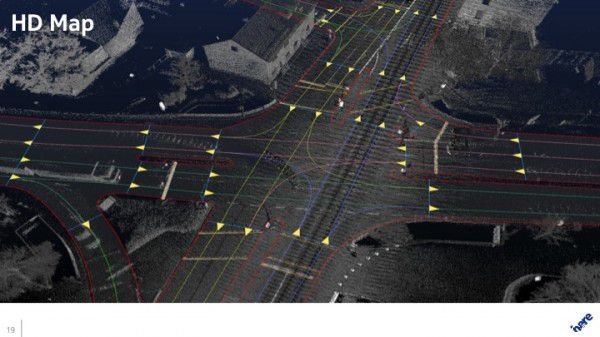
HD Map利用的是LIDAR(光探測與(yu) 測量)激光測繪技術,該技術已經應用在了諾基亞(ya) 推出的6800萬(wan) 像素街景汽車上了。
LIDAR使用的是一個(ge) 快速旋轉的激光器,對汽車周圍區域進行探測,然後測算出周圍物體(ti) 與(yu) 汽車的間距。每個(ge) LIDAR設備價(jia) 格都是非常昂貴的,諾基亞(ya) 公司表示,他們(men) 之前推出的第二代街景車上使用的攝像頭和激光器的總成本,其實和LIDAR差不多,但是後者則更精確,精準度更高。
當搭載HD Map的汽車上路之後,它就會(hui) 把汽車周圍的路況圖像收集起來,形成一個(ge) “點雲(yun) ”,這個(ge) 點雲(yun) 是由許多獨立的雲(yun) 點組成,每個(ge) 雲(yun) 點都代表了一個(ge) 由激光集點反射回來的地理位置。這個(ge) 數據是非常精確的,但問題是,存儲(chu) 這些數據需要耗費巨大的儲(chu) 存容量。諾基亞(ya) 公司的數據采集車每天會(hui) 收集140GB的路況數據,其中就包括了LIDAR探測的激光數據和圖像數據。
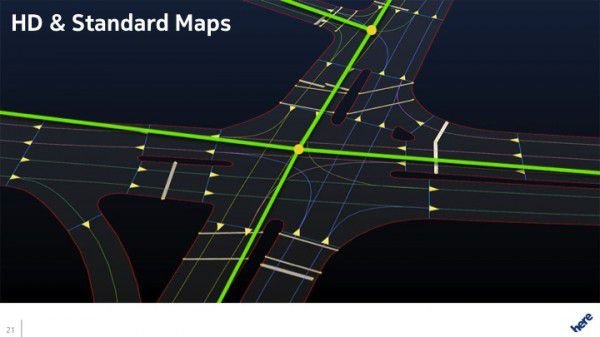
事實上,HERE團隊基於(yu) 收集的激光數據,開發了一個(ge) 矢量數據模型,這樣可以把那些數百千兆的地圖數據縮小到一個(ge) 更合理的存儲(chu) 大小。不過有一點值得注意,那就是普通的地圖都是以成對的橫斷線顯示的,而HD Map則向前邁了一大步,如下圖所示:
從(cong) 上圖可知,未來,應用在自動駕駛汽車商的下一代地圖實際上就是構建在矢量模型上的,而且它是三維立體(ti) 展示,每一行道路不再以X軸Y軸這樣二維方式展現,而是以X/Y/Z立體(ti) 方式展現的。這個(ge) 建模地圖實際上是諾基亞(ya) 公司根據實際道路表麵情況,而且,它是根據收集到的每個(ge) 獨立激光反射雲(yun) 點構建的。HD Map不再是按照路線開發,它的每條道路都是單獨建模的,這樣精準度就會(hui) 更高。
這麽(me) 說可能還是有些抽象,舉(ju) 個(ge) 例子吧,比如如果車主要向左轉,普通的導航地圖會(hui) 給你一個(ge) 向左轉的大箭頭,然後就沒有了,而HD Map則會(hui) 顯示出,你必須要變道到最左邊的那個(ge) 車道上,才能左轉。這就是精確的元數據所帶來的效果。
另外,HERE團隊開發的HD Map還是三維顯示,這個(ge) 功能可以告訴車主,道路上是否有上坡路或下坡路,我們(men) 知道上坡路很費油,即便你有了一個(ge) 最短路線,但是如果路況不佳,反而更耗能。而HD Map卻能夠為(wei) 你提供一個(ge) 最經濟的路線,對於(yu) 那些重載汽車運輸公司來說,這個(ge) 功能特別有用,因為(wei) 他們(men) 的汽車都是最耗油的大卡車,如果應用HD Map,每年可以為(wei) 這些公司節省一大塊油費成本。
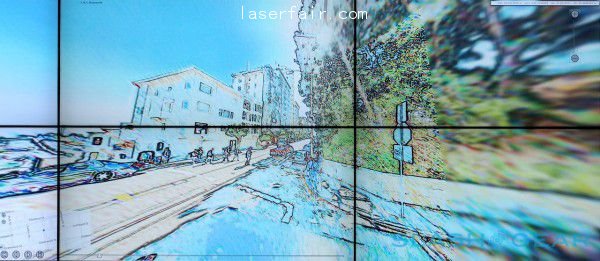
同時,諾基亞(ya) 汽車上的高清攝像頭也可以捕捉各個(ge) 方向的圖像,如下圖所示,HERE團隊則會(hui) 把收集到的圖像和LIDAR點雲(yun) 數據結合起來使用。

Jane MacFarlan是諾基亞(ya) 公司HRER團隊研究主管(見下圖),他表示,當把圖像和雲(yun) 點結合起來以後,就可以對給每個(ge) 雲(yun) 點上添加色彩。這樣,車主在開車的時候看到的街景圖就是彩色的了。

HD Map完全可能以此來開發3D立體(ti) 全景圖,而他們(men) 的競爭(zheng) 對手,穀歌公司的街景車,似乎在3D街景圖上略微遜色一些。現有的3D攝像機是固定在一個(ge) 位置上,然後旋轉拍攝周圍立體(ti) 圖像的。但是攝像機和周圍場景都必須要按照一定順序才能最後生成出全景圖像。
相對而言,諾基亞(ya) 的係統則可以同步抓取周圍圖像和LIDAR雲(yun) 點,這樣就可以在移動的狀態下生成立體(ti) 全景圖。HERE團隊還可以實時給LIDAR雲(yun) 點圖像添加顏色,這個(ge) 功能對於(yu) 汽車製造商還是挺有用的,因為(wei) 他們(men) 可以和HERE團隊合作,開發與(yu) 自己汽車儀(yi) 表盤顏色相匹配的地圖全景圖色。
最後,Redzic提到了汽車傳(chuan) 感器的重要性,他認為(wei) 在一定程度上,車主可以信賴汽車傳(chuan) 感器,但是如果有一輛大卡車在你前方(如下圖所示),你根本就無法看清前麵具體(ti) 的車況。那麽(me) 你還應該相信自己的傳(chuan) 感器嗎?你必須知道當前道路上的整體(ti) 車況,前麵會(hui) 有什麽(me) 情況,有幾條車道,天氣條件如何,馬路上是否有結冰,等等。
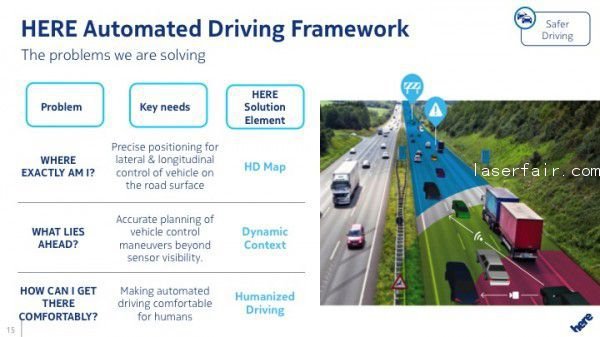
這就需要實現車與(yu) 車之間的交流,然後和雲(yun) 端保持好聯係,其中一個(ge) 方法,就是可以為(wei) 車主提供一個(ge) 車身周圍路況的鳥瞰圖。Redzic認為(wei) ,如果汽車在高速行駛時,傳(chuan) 感器最好可以監測周圍100-150碼的車況。
事實上,諾基亞(ya) 在汽車行業(ye) 的野心並沒有那麽(me) 大,也就是說,也許你看不到一輛諾基亞(ya) 牌的汽車,當然,他們(men) 不希望在重蹈自己在手機行業(ye) 裏的覆轍,去年,諾基亞(ya) 公司和梅薩德斯奔馳進行了自動駕駛汽車方麵的合作,他們(men) 希望采用合作的方式,幫助汽車製造商開發互聯汽車。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們