




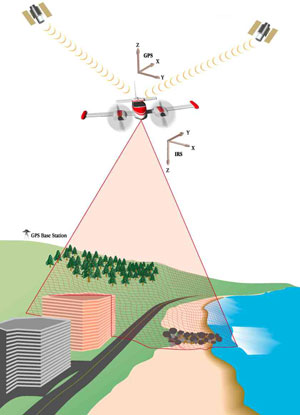
機載激光雷達(LiDAR)是一種新型主動式航空傳感器,通過集成定姿定位係統(POS)和激光測距儀,能夠直接獲取觀測點的三維地理坐標。按其功能分主要有兩大類:一類是測深機載LiDAR(或稱海測型LiDAR),主要用於海底地形測量;另一類是地形測量機載LiDAR(或稱陸測型LiDAR),正廣泛應用於各個領域,在高精度三維地形數據(數字高程模型(DEM))的快速、準確提取方麵,具有傳統手段不可替代的獨特優勢。尤其對於一些測圖困難區的高精度DEM數據的獲取,如植被覆蓋區、海岸帶、島礁地區、沙漠地區等,LiDAR的技術優勢更為明顯。
機載激光雷達係統從(cong) 上世紀80年代開始出現一些試驗係統,到90年代中後期逐漸成熟。現在的激光雷達可以記錄多次回波,首次回波建立測區的數字表麵模型(DSM),如果通過一定的算法去除非地麵點,可以獲得數字地麵模型(DTM)。這種工作方式看起來沒有任何問題,但對用戶來說是無法獲得任何與(yu) 有關(guan) 設備本身相關(guan) 的一些信息的,如如何根據回波信號定位?地物結構對獲取的回波信號的形狀和大小有何影響?回波信號是如何被量化成幾次離散脈衝(chong) 信號?等等。國外設備製造商往往將脈衝(chong) 探測和量化方法作為(wei) 商業(ye) 機密而保密。我們(men) 地理信息行業(ye) 企業(ye) 會(hui) 因為(wei) 激光雷達點雲(yun) 數據的不確定性增加野外實測數據工作量,並且增加內(nei) 業(ye) 數據處理難度。我們(men) 需要破解國外激光雷達硬件廠家的技術機密,並且發明一種方法做的比國外廠家還要好。
解決(jue) 上述問題的途徑是將發射信號和回波信號均以很小的采樣間隔進行采樣並記錄,而不僅(jin) 僅(jin) 是記錄若幹次離散的回波信號。這樣的采樣記錄方式即所謂的全波形數字化記錄,這種類型的激光雷達係統稱為(wei) waveform-digitizing LIDAR。用戶完全可以根據波形數據,根據其自己的應用領域(如測繪、林業(ye) 、城市建模等等),對波形數據進行分析和處理。
中國科學院李奇博士發明的機載激光雷達波形數據量化分解方法,可以比激光雷達設備製造商提供數量更多、回波次數更多和精度更高的點雲(yun) 數據。
全球頂級機載激光雷達硬件廠商RIEGL生產(chan) 的點雲(yun) 數據與(yu) 李奇博士發明的高斯分解生產(chan) 的點雲(yun) 數據進行比較得到表1所示的結果。從(cong) 表中可以看出高斯分解提取的點雲(yun) 數量要比係統得到的要多,而且回波次數也要多,可以看出波形分解得到點雲(yun) 的層次感要更好。這對植被結構參數的計算,城市建模,地形斷線的提取都有很大的好處。

表1高斯分解和係統的比較
李奇博士發明的波形數據高斯分解方法得到的點雲(yun) 數據有更多的層次感,可以很直觀地看到哪裏的植被比較多,哪裏沒有植被,即使沒有光譜信息也可以做出準確的判斷,在這裏甚至可以判斷植被的密集程度和高矮,這是影像無法做到的。
這個(ge) 數據是在一個(ge) 有植被覆蓋的山區采集的,機載激光雷達生產(chan) 的重要產(chan) 品之一就是DTM和DSM。係統的脈衝(chong) 觸發計時器在垂直方向上的分辨率大約為(wei) 2米,表2分析了RIEGL係統和李奇博士的高斯分解方法在最後一次回波上的表現。可見在最大高程上兩(liang) 者基本一致,但高斯分解得到的最小高程要比係統得到的低2.04米,平均高程低0.065米,說明李奇博士的方法在低矮植被處表現更好,使DTM生產(chan) 的原始數據質量有更好的保證。係統提取的點比高斯分解得到的多是因為(wei) 有些地物對激光的反射率很小造成波形起伏非常小,基本上由噪音組成,係統會(hui) 在一個(ge) 噪音很突出的地方記錄一次回波,而高斯分解則認為(wei) 它是噪音而不記錄。係統得到的奇異點比高斯分解要多。
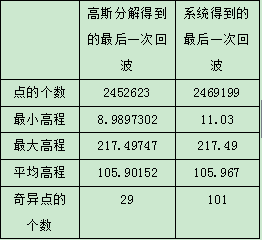
表2最後一次回波的比較
通過表1和表2,我們(men) 可以看出李奇博士的方法得到點雲(yun) 數據的質量要比國外激光雷達硬件廠商RIEGL係統得到的要高。此發明讓企業(ye) 數據處理人員對設備采集的數據精度能做到知其然知其所以然,提高數據處理效率,並減少外業(ye) 實測工作量,實實在在的幫助企業(ye) 降低成本。
我們(men) 相信隨著我國科技的持續進步,我國未來完全有能力引領適合我國國情的產(chan) 業(ye) 技術升級
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們