




從四個維度深度剖析激光雷達核心技術
激光雷達(LiDAR)的產業化熱潮來源於自動駕駛汽車的強烈需求。在美國汽車工程師學會(SAE)定義的L3級及以上的自動駕駛汽車之中,作為3D視覺傳感器的激光雷達彰顯了其重要地位,為自動駕駛的安全性提供了有力保障。因此,激光雷達成為了產業界和資本界追逐的“寵兒”,投資和並購消息層出不窮。很多老牌整車廠和互聯網巨頭都展開了車載激光雷達的“軍備競賽”。近期,MEMS激光雷達技術發展最為活躍,並且吸引了大多數投資,同時寶馬宣布將於2021年推出集成MEMS激光雷達的自動駕駛汽車。
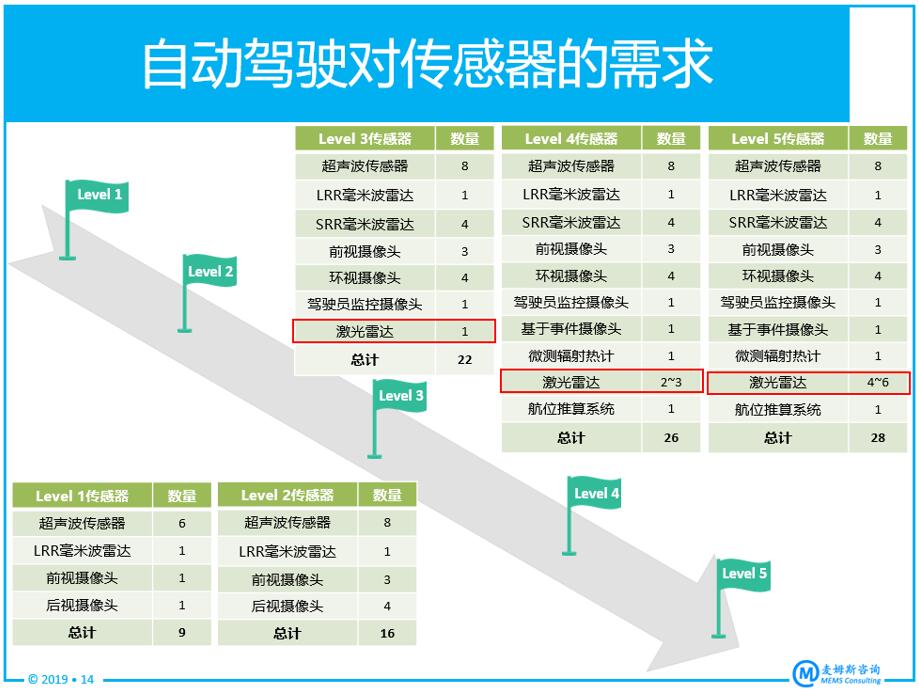
不同自動駕駛等級對傳感器的需求分析
(數據來源:Yole)
伴隨著自動駕駛熱度上升,激光雷達相關新聞鋪天蓋地襲來。但是這項在自動駕駛領域尚不成熟的3D視覺技術,不僅公開技術資料稀缺,而且企業和媒體關於各種激光雷達的分類和稱謂表達五花八門,例如:機械式、固態、全固態、混合固態;又如:MEMS(微機電係統)、OPA(光學相控陣)、Flash(閃光);亦如:FMCW(調頻連續波)、脈衝波;還如:飛行時間法、三角測距法等。這些稱謂常常讓圈內圈外的人士感到困惑。
當我們在交流“直接/間接飛行時間法、三角測距法”等概念時,這實際上是激光雷達的“測距原理”維度;而談及“機械式、MEMS、OPA、Flash”等關鍵詞時,這屬於激光雷達的“光束操縱”維度;無論是905nm還是1550nm的波長,還是邊發射激光器(EEL)或垂直腔麵發射激光器(VCESL),這是從激光雷達的“光源”維度交流問題;而涉及PIN、APD(雪崩光電二極管)/SPAD(單光子雪崩二極管)、SiPM(矽光電培增管),或是單點、線陣、麵陣,則是從激光雷達的“探測器”維度分析技術。
掌握不同類型激光雷達技術路線及“硬核”
按照光束操縱方式分類,激光雷達主要分為機械式激光雷達、MEMS激光雷達、OPA激光雷達和Flash激光雷達。觀察目前產業發展情況,MEMS和Flash技術更受到激光雷達廠商的青睞,有望逐步取代機械式激光雷達。
MEMS微鏡作為MEMS激光雷達的核心元器件,毫米級尺寸大大減少了激光雷達的體積,幫助係統擺脫了笨重的馬達等機械式裝置;同時,MEMS微鏡的引入大大減少激光器和探測器數量,極大地降低整體成本;在投影顯示領域商用化應用多年的經曆及近期在汽車領域的努力,讓業界對MEMS微鏡的成熟度更為認可。但是,MEMS微鏡尺寸的縮小又限製了MEMS激光雷達的光學口徑、掃描角度,視場角也會變小;如何通過車規也是MEMS微鏡麵臨的巨大挑戰。
OPA激光雷達無需任何機械部件就可以實現對光束的操縱,曾一度被業界看好。但核心元器件——OPA芯片的納米加工難度非常高。以Quanergy為代表的OPA激光雷達廠商不斷修正其產品的量產時間和最遠測距範圍。
Flash激光雷達被視為最終的主流技術路線。Flash激光雷達技術利用激光器同時照亮整個場景,如何提高接收端每個像素可接收的能量,從而實現遠距離探測,這對線陣/麵陣探測器技術提出了極高要求。
FMCW激光雷達另辟蹊徑:測距又測速
調頻連續波(FMCW)激光雷達采用基於光源頻率調製的間接飛行時間法,通過比較任意時刻反射信號頻率與此時刻發射信號頻率的之差方法來得到目標的距離信息。該激光雷達類型與上述四種激光雷達(按照光束操縱方式分類)不一樣,是從光源波形角度進行分類的。FMCW激光雷達的光源信號調製主要包括三角波調製、鋸齒波調製、正弦波調製等方式。由於正弦波調製檢測物體時需要調節信號頻偏,大多應用於隻有一個探測目標的情況,比如高度計。如果希望FMCW激光雷達檢測多個目標的距離和速度等信息,通常采用三角波調製。
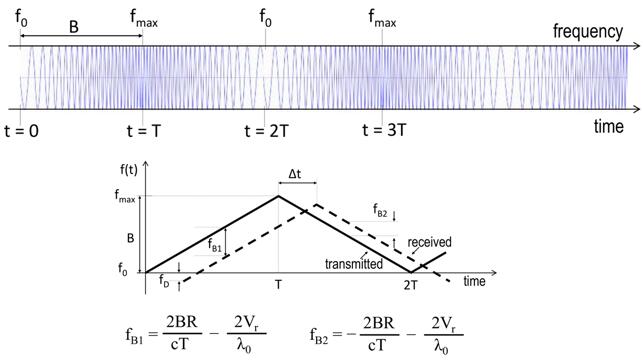
FMCW激光雷達的光源信號采用三角波調製時,通過測量fB1和fB2就可確定與反射目標的距離及其徑向速度
FMCW激光雷達采用相幹測量技術。相幹測量又稱光外差探測。激光器發出的光經分束器後分為兩束,一束作為本振光,另一束在調製後經光學係統照射到目標物體上,反射回來的光(信號光),與本振光在光電探測器上混頻。相幹測量具有轉換增益高、獲得光信號全部信息(振幅、頻率、相位)、對背景光濾波性能高、可探測微弱信號等優勢。在相幹測量中,為了獲得最佳的信噪比,需要足夠高的本振光功率,這對激光器的要求非常高(窄線寬激光頻率線性調諧),同時也需要平衡光電探測器。平衡光電探測器利用在同一探測係統中放置兩組探測器件,分別將本振光和信號光輸入到光電二極管中,將光信號轉化為電信號,然後經過減法器運算,輸出外差信號。
激光雷達(LiDAR)的產業化熱潮來源於自動駕駛汽車的強烈需求。在美國汽車工程師學會(SAE)定義的L3級及以上的自動駕駛汽車之中,作為3D視覺傳感器的激光雷達彰顯了其重要地位,為自動駕駛的安全性提供了有力保障。因此,激光雷達成為了產業界和資本界追逐的“寵兒”,投資和並購消息層出不窮。很多老牌整車廠和互聯網巨頭都展開了車載激光雷達的“軍備競賽”。近期,MEMS激光雷達技術發展最為活躍,並且吸引了大多數投資,同時寶馬宣布將於2021年推出集成MEMS激光雷達的自動駕駛汽車。
不同自動駕駛等級對傳感器的需求分析
(數據來源:Yole)
伴隨著自動駕駛熱度上升,激光雷達相關新聞鋪天蓋地襲來。但是這項在自動駕駛領域尚不成熟的3D視覺技術,不僅公開技術資料稀缺,而且企業和媒體關於各種激光雷達的分類和稱謂表達五花八門,例如:機械式、固態、全固態、混合固態;又如:MEMS(微機電係統)、OPA(光學相控陣)、Flash(閃光);亦如:FMCW(調頻連續波)、脈衝波;還如:飛行時間法、三角測距法等。這些稱謂常常讓圈內圈外的人士感到困惑。
當我們在交流“直接/間接飛行時間法、三角測距法”等概念時,這實際上是激光雷達的“測距原理”維度;而談及“機械式、MEMS、OPA、Flash”等關鍵詞時,這屬於激光雷達的“光束操縱”維度;無論是905nm還是1550nm的波長,還是邊發射激光器(EEL)或垂直腔麵發射激光器(VCESL),這是從激光雷達的“光源”維度交流問題;而涉及PIN、APD(雪崩光電二極管)/SPAD(單光子雪崩二極管)、SiPM(矽光電培增管),或是單點、線陣、麵陣,則是從激光雷達的“探測器”維度分析技術。
掌握不同類型激光雷達技術路線及“硬核”
按照光束操縱方式分類,激光雷達主要分為機械式激光雷達、MEMS激光雷達、OPA激光雷達和Flash激光雷達。觀察目前產業發展情況,MEMS和Flash技術更受到激光雷達廠商的青睞,有望逐步取代機械式激光雷達。
MEMS微鏡作為MEMS激光雷達的核心元器件,毫米級尺寸大大減少了激光雷達的體積,幫助係統擺脫了笨重的馬達等機械式裝置;同時,MEMS微鏡的引入大大減少激光器和探測器數量,極大地降低整體成本;在投影顯示領域商用化應用多年的經曆及近期在汽車領域的努力,讓業界對MEMS微鏡的成熟度更為認可。但是,MEMS微鏡尺寸的縮小又限製了MEMS激光雷達的光學口徑、掃描角度,視場角也會變小;如何通過車規也是MEMS微鏡麵臨的巨大挑戰。
OPA激光雷達無需任何機械部件就可以實現對光束的操縱,曾一度被業界看好。但核心元器件——OPA芯片的納米加工難度非常高。以Quanergy為代表的OPA激光雷達廠商不斷修正其產品的量產時間和最遠測距範圍。
Flash激光雷達被視為最終的主流技術路線。Flash激光雷達技術利用激光器同時照亮整個場景,如何提高接收端每個像素可接收的能量,從而實現遠距離探測,這對線陣/麵陣探測器技術提出了極高要求。
FMCW激光雷達另辟蹊徑:測距又測速
調頻連續波(FMCW)激光雷達采用基於光源頻率調製的間接飛行時間法,通過比較任意時刻反射信號頻率與此時刻發射信號頻率的之差方法來得到目標的距離信息。該激光雷達類型與上述四種激光雷達(按照光束操縱方式分類)不一樣,是從光源波形角度進行分類的。FMCW激光雷達的光源信號調製主要包括三角波調製、鋸齒波調製、正弦波調製等方式。由於正弦波調製檢測物體時需要調節信號頻偏,大多應用於隻有一個探測目標的情況,比如高度計。如果希望FMCW激光雷達檢測多個目標的距離和速度等信息,通常采用三角波調製。
FMCW激光雷達的光源信號采用三角波調製時,通過測量fB1和fB2就可確定與反射目標的距離及其徑向速度
FMCW激光雷達采用相幹測量技術。相幹測量又稱光外差探測。激光器發出的光經分束器後分為兩束,一束作為本振光,另一束在調製後經光學係統照射到目標物體上,反射回來的光(信號光),與本振光在光電探測器上混頻。相幹測量具有轉換增益高、獲得光信號全部信息(振幅、頻率、相位)、對背景光濾波性能高、可探測微弱信號等優勢。在相幹測量中,為了獲得最佳的信噪比,需要足夠高的本振光功率,這對激光器的要求非常高(窄線寬激光頻率線性調諧),同時也需要平衡光電探測器。平衡光電探測器利用在同一探測係統中放置兩組探測器件,分別將本振光和信號光輸入到光電二極管中,將光信號轉化為電信號,然後經過減法器運算,輸出外差信號。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們