





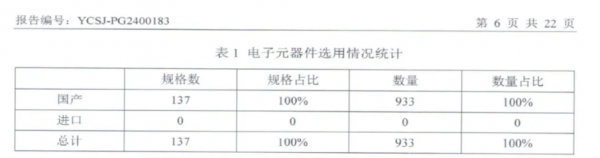
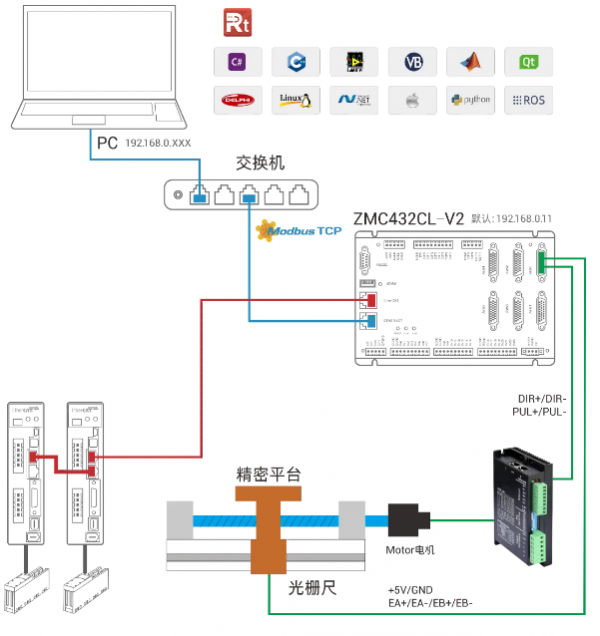
2024年12月12日,正運動技術應邀出席在深圳國際會(hui) 展中心洲際酒店盛大舉(ju) 行的“2024中國運動控製/直驅技術產(chan) 業(ye) 發展高峰論壇暨頒獎盛典”。本次活動由中國傳(chuan) 動網、運動控製產(chan) 業(ye) 聯盟、直驅產(chan) 業(ye) 聯盟以及ITES深圳工業(ye) 展聯合主辦,匯聚了眾(zhong) 多業(ye) 內(nei) 知名工控企業(ye) 與(yu) 專(zhuan) 家,共同參與(yu) 這一高規格的行業(ye) 盛會(hui) 。 本屆以“動能轉換,競合拓局”為(wei) 主題,從(cong) 理論與(yu) 實踐兩(liang) 個(ge) 層麵深入探討中國工控自動化行業(ye) 新舊動能轉換所帶來的機遇與(yu) 對策,旨在通過促進產(chan) 業(ye) 鏈環節的高效協同與(yu) 良性互動,加快構建開放、協同、共贏的產(chan) 業(ye) 新生態,從(cong) 而更好地滿足新發展格局下的多元需求。 正運動:堅持國產(chan) 運動控製,築牢自主可控根基,開拓新機遇 在這一產(chan) 業(ye) 變革浪潮中,正運動始終秉承“自主自研、自主可控”的理念,專(zhuan) 注於(yu) 運動控製領域,解決(jue) 關(guan) 鍵技術難題,在嵌入式平台運動控製器,PCI/PCIe超高實時運動控製卡,x86運動控製平台等方麵實現了跨平台、高性能、高集成的運動控製技術的集成與(yu) 突破,不斷完善產(chan) 品線,先後推出多款具有應用價(jia) 值的運動控製落地解決(jue) 方案,雙重提升了工業(ye) 自動化產(chan) 線生產(chan) 效率和精度! 正是基於(yu) 在高速高精運動控製領域的出色表現,以及ZMC432HG運動控製器完成100%器件全國產(chan) 化的認證,再加上市場影響力的持續提升,正運動再次榮獲CMCD 2024年度兩(liang) 項重要獎項。這一成就不僅(jin) 表明正運動在市場實踐中穩健前行,實現了“量”的擴張和“質”的提升,也凸顯了正運動在應對不斷變化的行業(ye) 需求過程中取得切實進展,從(cong) 而在中國運動控製領域自主可控與(yu) 高質量可持續發展的進程中再次邁出堅實的一步。 順利通過“廣五所”【工業(ye) 和信息化部電子第五研究所元器件與(yu) 材料研究部(院)】的權威認證。 CMCD 2024年度運動控製領域最具競爭(zheng) 力品牌 榮獲“CMCD 2024年度運動控製領域最具競爭(zheng) 力品牌”。 CMCD 2024年度運動控製領域行業(ye) 應用獎 PCIe實時運動控製卡光總線解決(jue) 方案榮獲“CMCD 2024年度運動控製領域行業(ye) 應用獎”。 在此次盛會(hui) 上,正運動憑借其在國產(chan) 運動控製領域自主可控的持續努力,榮獲兩(liang) 項大獎。這不僅(jin) 是對正運動綜合實力和市場表現的有力肯定,也意味著正運動在夯實自主可控基礎、以客戶需求為(wei) 導向的進程中取得了實際進展。 未來,正運動技術將始終秉持提升國產(chan) 運動控製技術和產(chan) 品的初心,不斷克服軟硬件技術的瓶頸,矢誌於(yu) 打造自主可控、簡單易用、功能強大的運動控製技術,致力於(yu) 為(wei) 客戶提供更好用的運動控製產(chan) 品和生態。 切實幫助客戶與(yu) 合作夥(huo) 伴,合作企業(ye) 解決(jue) 卡脖子問題,正運動將持續積聚力量攻堅運動控製核心技術,不斷加大技術研發的投入,積極洞察並把握市場動態,快速響應客戶需求,為(wei) 客戶提供更優(you) 質的產(chan) 品和服務。 麵對新一輪產(chan) 業(ye) 變革的挑戰與(yu) 機遇,正運動持開放與(yu) 學習(xi) 的態度,對外積極學習(xi) 先進經驗,對內(nei) 不斷深思改善,與(yu) 合作夥(huo) 伴開放協作,而非閉門造車。基於(yu) 此,正運動技術願與(yu) 產(chan) 業(ye) 鏈上下遊企業(ye) 攜手並進,實現運動控製關(guan) 鍵技術的自主可控,加速技術與(yu) 應用的創新以及資源整合,共同應對中國運動控製行業(ye) 新發展周期的考驗,推動中國運動控製行業(ye) 的高質量可持續發展和產(chan) 業(ye) 價(jia) 值鏈的深度拓展。 基於(yu) x86架構的EtherCAT總線視覺運動控製器,跨平台部署,支持脫機運行,內(nei) 置豐(feng) 富的視覺和運動控製功能,大幅簡化配置流程。核內(nei) 數據交互速度快,顯著降低時間和成本投入,提高項目實施效率。 安裝與(yu) 拆卸過程便捷,占地空間小,能與(yu) 其他控製單元部件(如伺服驅動器、傳(chuan) 感器等)和MES係統無縫集成。提供一體(ti) 化開放式IPC形態的實時軟控製器/軟PLC集成的機器視覺+運動控製解決(jue) 方案。 麵向高速高精、專(zhuan) 機係統及中大型產(chan) 線設備的視覺運動控製解決(jue) 方案! 可選6-64軸運動控製(脈衝(chong) +EtherCAT總線),EtherCAT周期最快可達250us; 支持多種通訊接口,方便客戶集成現有係統中; 搭載MotionRT7,內(nei) 核交互,指令調用快至us級,支持第三方視覺軟件; 多核並行運算,能夠高效處理運動控製,機器視覺等自動化設備核心任務; 板載20路通用輸入(其中10路為(wei) 高速輸入),20路高速輸出; 支持EtherCAT冗餘(yu) 功能,解決(jue) 單點故障停機,自動診斷並持續運行,增強係統可靠性,簡化維護工作。 ZMC432CL-V2是一款高性能運動控製器,具備高速實時反饋功能,支持脈衝(chong) 全閉環控製,能夠實現高精度、高響應速度的運動控製。高精度定位,有效消除機械傳(chuan) 動誤差,滿足高精密加工場景應用要求。 (1)使用現成的API開發各種裝備 (2)步進電機的外置光柵尺全閉環解決(jue) 方案 ZMC4係列高效的網口讀寫(xie) ,PCIe/PCI係列卡可共享內(nei) 存接口(共享內(nei) 存的批量讀寫(xie) 3-5us); 內(nei) 置反向間隙補償(chang) ,雙向螺距補償(chang) ,2D平麵補償(chang) 等; 可以同時支持脈衝(chong) 軸和EtherCAT軸運動混合使用; 開放的PT/PVT接口客戶可自定義(yi) 加減速算法的二次編程; ZMC432CL-V2可支持步進電機的外置光柵尺全閉環解決(jue) 方案。 在“PC+運動控製卡”架構中,實現精準的多軸同步控製與(yu) 高速點位運動控製,支持靈活定製軸數和功能以滿足不同客戶需求。支持位置鎖存、高速位置比較輸出(PSO)、同步跟隨、全係插補等功能,並支持多種上位機編程語言,便於(yu) 用戶二次開發。 采用PCIe和EtherCAT總線接口設計,確保半導體(ti) 封裝&測試設備實現高速高精運動控製。通過短周期、高協同性,確保設備運動平穩加工,消除抖動。 廣泛應用於(yu) 高速固晶機、半導體(ti) 測試分選機、引線鍵合、PCB曝光機UVW運動控製、晶圓傳(chuan) 輸機械手等半導體(ti) 封裝&測試設備應用場景中。 PT/PVT運動,靈活處理運動軌跡和速度的規劃; 更安全機製,掉電中斷、掉電保存,PC宕機也能正常運行; SS曲線速度與(yu) 加速度平滑,解決(jue) 高速往複運動中的抖動問題; 超高速實時性,可內(nei) 置RTBasic腳本程序,實現us級的高速響應; 1D/2D/3D硬件位置比較速度PSO,視覺飛拍、精密點膠、激光加工等應用; 在線變速/位置、速度、力矩模式在線切換,實現二段速、三段速和軟著陸等應用; 強悍的帶軸能力,6-64軸,EtherCAT最快周期可達125us,EtherCAT和脈衝(chong) 軸混合使用。 ZMC432HG,100%全國產(chan) 器件和全自主軟件IDE與(yu) 實時內(nei) 核自主自研,自主可控。保障供應鏈持續供貨能力,符合國產(chan) 替代的國家戰略需求。 同時也是工業(ye) 互聯網的關(guan) 鍵組件之一,結合豐(feng) 富的運動控製功能、實時數據采集、處理和本地計算等,具備高度靈活的可編程性和出色的運動控製性能,為(wei) 運動控製協同工業(ye) 互聯網應用帶來巨大市場潛力,同時也使其成為(wei) 企業(ye) 實現智能製造並高效穩定生產(chan) 的核心控製部件。 32軸運動控製:支持點到點到多軸同步控製,EtherCAT運動周期最快可達250us; 支持6路10MHz脈衝(chong) 輸出和編碼器軸接口,總線軸、脈衝(chong) 軸可混合插補; 2路模擬量AD/DA,可全麵監控物理量與(yu) 過程變量; 豐(feng) 富的I/O接口,24路輸入和12路輸出,其中包括4路高速輸入輸出; 多類實時運動控製功能,視覺飛拍、多維PSO、高速PWM、高速硬件鎖存等; RS485/RS232可接儀(yi) 表、傳(chuan) 感器等; EtherNET網口對接MES、雲(yun) 平台 可配置Linux係統,實現工藝開發的差異化; 硬件核心器件全國產(chan) ,運動控製核心runtime軟件MotionRT正運動技術自主自研,PC端IDE RTSys正運動技術自主自研持續改進。 ZMC432HG具備豐(feng) 富的硬件接口和功能模塊,能實現高效穩定的運動控製和實時數據采集,滿足工業(ye) 控製協同工業(ye) 互聯網的應用需求。











轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們