





5 加工質量管理
原子能領域的焊接其質量管理比較嚴(yan) 格,要求能長時間穩定地焊接。在廢爐拆除切割方麵,從(cong) 其遠距離操作性來看,加工過程中加工狀況的監視技術是重要的開發項目之一。下麵介紹焊接加工中的監視方法。
5.1 加工中焊接狀況的監視
圖10示出監視頭的構成。監視時,以光軸和同軸抽出焊接狀況的圖像,同時分光、探測焊接部的發光。為(wei) 了使熔深加深,采用脈衝(chong) 振蕩。根據焊接狀況圖像,對熔池形狀和焊接坡口線位置進行圖像處理,並向操作人員提供視覺信息。焊接部的發光抽出,與(yu) 以前所實施的采用多條監視光纖的方法對應,因為(wei) 焊接頭所要求的空間製約條件並不嚴(yan) 格,用一根監視光纖把用半反射鏡分出的光抽出。下表中示出焊接部發光的抽出方法。這裏采用的是在抽出焊接參數、激光器輸出、焦點位置變化的同時,探測穿透焊接時內(nei) 部波穩定性和焊接保護狀況。
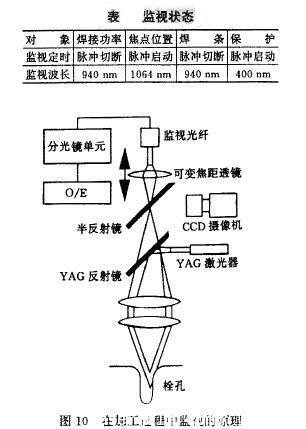
相對於(yu) 各種監視對象,激光器輸出和內(nei) 部波狀態,監視波長取940nm,探測了脈衝(chong) 斷開時熔化池的發光。從(cong) 這個(ge) 波長所使用的傳(chuan) 感器(矽光二極管)的光譜響應特性和監視對象的溫度變化範圍,根據普朗克輻射定律進行波長選定解析,實際上又對各種波長進行了監視,最後選出靈敏度最好的監視波長。關(guan) 於(yu) 焦點位置變化,抽出脈衝(chong) 接通時YAG激光器的反射光,關(guan) 於(yu) 保護狀況的穩定性,為(wei) 了探測更高溫度時激光光圈的發光,把脈衝(chong) 接通時400nrn的短波長光抽出。
5.2監視結果
圖11示出焊接輸出的監視結果與(yu) 熔深深度的比較。從(cong) 此結果中可以看出,熔深深度變化0.4mm時,就可探測到輸出功率100W左右的焊接變化。圖12示出焦點位置和YAG激光器反射光及熔深深度的關(guan) 係。這裏雖然采用焦點深度Bf=200mm的大透鏡,但是可以探測士4mm的熔深變化。圖13示出穿透和未穿透時的發光強度變化。穿透焊接時,因為(wei) 熔融金屬在板內(nei) 穿過,所以發光強度下降,於(yu) 是就能探測到可以獲得穩定的內(nei) 部波焊道的狀態。
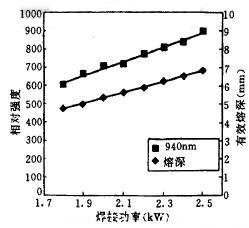
圖11 焊接輸出的監視結果
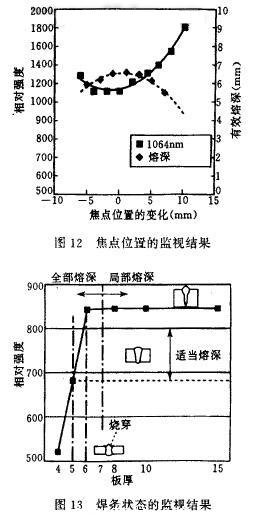
圖14示出由於(yu) 保護氣體(ti) 狀態變化,焊道發生氧化時每個(ge) 脈衝(chong) 的發光波形與(yu) 保護氣體(ti) 狀態穩定時的比較。從(cong) 圖中可以看出,由於(yu) 焊道發生氧化,光圈的發光強度增大。關(guan) 於(yu) 以上加工中的監視信息,將根據加工對象的不同靈活使用。
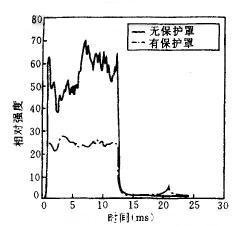
圖14 保護氣體(ti) 狀態的監視結果
6混合激光焊接
為(wei) 了進一步擴大激光焊接的用途,現開發了一種利用激光焊接和電弧焊接優(you) 點的同軸TIG-YAG激光焊接方法。
6.1同軸TIG-YAG激光焊接
圖15示出同軸TIG-YAG激光焊接頭的外貌。這種焊接方法,是把從(cong) 光纖射出的光束分開,將TIG焊極設置在其中央,使光束在TIG焊極頂端下方再次聚光,同軸向同一地方照射聚光光束和TIG弧光,進行焊接。
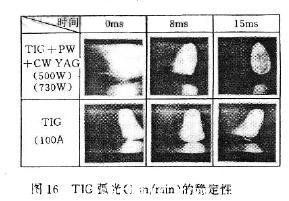
對這一過程中的TIG弧光和YAG激光光束的相互作用進行了研究,研究結果認為(wei) 弧光及光圈光束吸收可以忽略。圖16示出高速混合焊接時的弧光穩定性與(yu) 僅(jin) 用TIG焊接的比較結果。
6.2同軸TIG-YAG激光焊接的效果
圖17示出相對焊接坡口縫隙餘(yu) 量的同軸TIG-YAG激光焊接的結果。僅(jin) 用YAG時焊接坡口縫隙為(wei) 0.4mm時,會(hui) 產(chan) 生咬邊。而同軸TIG-YAG激光焊接時焊接坡口縫隙可達0.8mm。圖18示出根據焊接焊道的斷麵研究氣孔發生狀況的結果。因為(wei) 保護氣體(ti) 中使用了Ar,所以僅(jin) 采用YAG時不可避免在部分焊道中產(chan) 生氣孔。而同軸TIG-YAG激光焊接可以控製氣孔的發生,如圖19所示,這是因為(wei) 同軸TIG-YAG激光焊接比單用YAG時栓孔上部的孔徑大,金屬蒸汽容易排出。
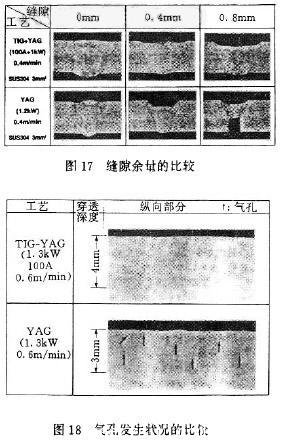
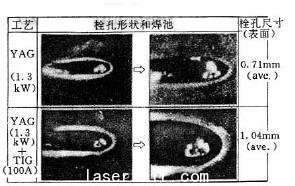
圖19 栓孔孔徑大小的比較
7 今後的發展
要想擴大激光加工在厚板領域的應用,必須使振蕩器實現高功率輸出,提高光束傳(chuan) 輸性能。高功率YAG激光器的應用越來越廣,今後,應加強加工質量管理,重點開發加工過程中的監視和相應控製技術。但是,擴大應用也與(yu) 激光器自身的最初成本有很大關(guan) 係。今後,應開發價(jia) 廉的高輸出二極管抽運YAG#p#分頁標題#e#激光器或直接加工用的半導體(ti) 激光器(LD),以擴大應用領域。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們