




位移台及其驅動器的選擇會(hui) 對實驗結果產(chan) 生至關(guan) 重要的影響。下文將逐一介紹相關(guan) 的核心參數,包括時間延遲窗口長度、最小運動步進、重複定位精度、偏移量、絕對精度和機械誤差等。
時間延遲窗口長度
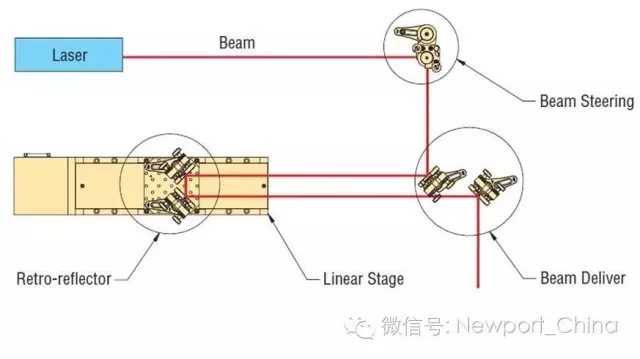
這是選擇直線位移台首先要考慮的參數。延遲窗口長度T指光束經過中空回射係統並返回所經曆的時間,與(yu) 位移台的行程L直接相關(guan) 。對於(yu) 采用單回路的時間延遲線設計,
T = 2*L/c
其中c是真空中的光速。
延遲步進分辨率
其次要考慮的是延遲步進分辨率(Δτ),它取決(jue) 於(yu) 位移台的最小運動增量(MIM)
Δτ = 2*MIM/c
重複定位精度
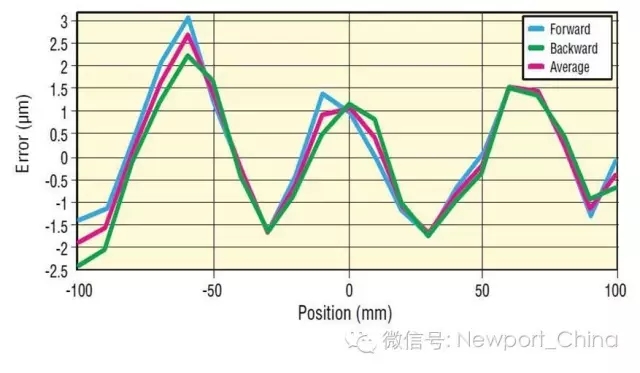
與(yu) 最小運動步進同樣重要的是位移台的重複定位精度,亦即係統多次重複到達同一指定位置時的偏差(上圖紅色曲線)。典型的時間分辨實驗中,直線位移台需要掃描特定的距離(由分析樣品所需的時間延遲計算得出),以記錄信號隨時間延遲的變化。重複掃描並取平均值可以提升信號質量並降低信躁比,因此需要位移台有較高的重複定位精度。
偏移量
平整度和直線度表征了理想直線運動的偏移量,分別垂直於(yu) 水平和豎直平麵上的運動。俯仰(Pitch)和偏擺(Yaw)指圍繞運動方向正交軸(y,z)的轉動,而翻滾(Roll)是圍繞運動方向軸的轉動,如下圖所示。
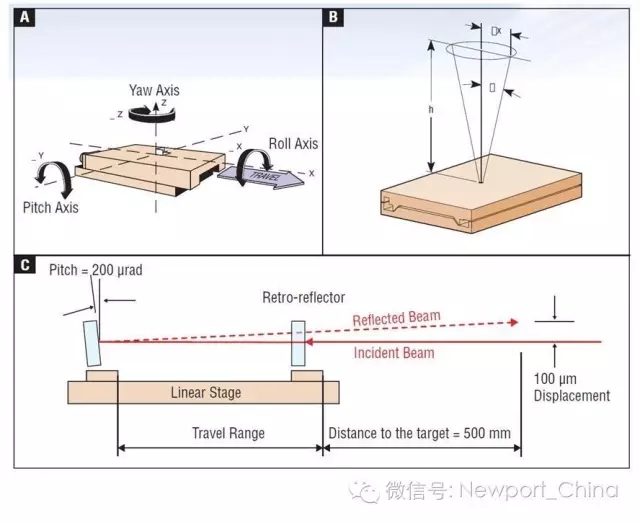
在泵浦——探測(Pump-Probe)時間分辨實驗中,泵浦和探測光束在目標樣品處實現空間重合,而它們(men) 的相對時間延遲則通過位移台的掃描來實現。位移台的偏移,尤其是角方向上的偏移,會(hui) 影響掃描過程中的空間重合度。兩(liang) 束光重合的位置距離延遲線越遠,位移台的俯仰和偏擺造成的空間偏移量便越大。
絕對精度
指令位置與(yu) 實際到達位置的匹配度,即是位移台的絕對精度。如果絕對精度較低,可能會(hui) 引起測試結果的畸變,導致一些假的動力學特征。位移台的驅動方式(螺杆、滾珠、傳(chuan) 動帶或直線電機)和反饋決(jue) 定其絕對精度。絲(si) 杠和滾珠驅動的位移台可以提供良好的最小運動增量。但大部分情況下,它們(men) 都采用開環控製設計,沒有位置反饋,所以絕對精度較低。直線電機驅動的係統不同於(yu) 螺杆驅動,不存在齒隙的問題。此外,直線電機受熱膨脹的影響較小,所以絕對精度較高。
反饋裝置相對於(yu) 電機的距離也會(hui) 直接影響到運動控製係統的絕對精度。
機械誤差
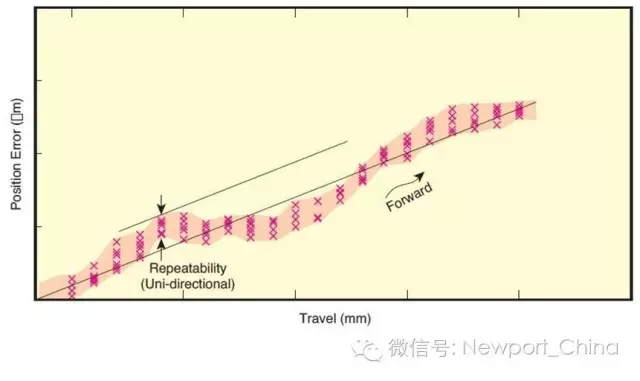
對於(yu) 線性或單調遞增的誤差,如餘(yu) 弦誤差、螺杆俯仰誤差、測量點的角度偏差(阿貝誤差)以及熱膨脹效應。它們(men) 可以通過線性誤差補償(chang) 來彌補,如上圖所示,通過線性補償(chang) 進行糾正。
補償(chang) 後精度=補償(chang) 前精度- (斜率x位移)
非線性誤差則需借助激光幹涉儀(yi) 來進行誤差補償(chang) 。根據精度需求選擇不同數量的點,每移動到一個(ge) 點記錄該位置的誤差,再通過控製器計算,以進行誤差補償(chang) 。帶有線性編碼器的位移台在經過補償(chang) 後,最終精度可達到數百納米。
上文列舉(ju) 了選擇延遲線需要考慮的主要因素。Newport生產(chan) 搭建延遲線所需要的多種位移台、控製器和回射裝置,歡迎您的谘詢。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們