




當今科技高速發展的時代,人們(men) 越來越需要機器人去替代人來完成一些危險的任務,例如在科學探索以及救災搶險中,經常會(hui) 遇到一些危險或者人類無法輕易到達的地方。機器人避障是機器人技術中一項最基礎也是關(guan) 鍵的功能,它旨在讓機器人行動過程中保證不發生碰撞,避免結構的過度老化、脫落。機器人避障技術的核心包括了傳(chuan) 感器的選擇和規劃算法的選擇。
一、機器人常用避障傳(chuan) 感器
機器人避障的第一步,是讓機器人能夠感知周圍環境。一般來說,我們(men) 需要通過傳(chuan) 感器給機器人提供周圍環境的參數指標。例如障礙物的尺寸、形狀和位置等。目前避障使用的傳(chuan) 感器各種各樣,其特點和適用範圍也不同。根據不同的原理,可分為(wei) :超聲波傳(chuan) 感器、紅外傳(chuan) 感器、激光傳(chuan) 感器和視覺傳(chuan) 感器等。
1)超聲波傳(chuan) 感器
超聲波傳(chuan) 感器的原理是:先發出超聲波,然後檢測反射波的延遲,根據聲速計算目標與(yu) 物體(ti) 之間的距離。由於(yu) 超聲波在空氣中的速度和濕度,溫度有關(guan) ,在實踐中,需要考慮到這些因素的變化。另外,超聲波傳(chuan) 感器的有效距離,一般小於(yu) 10m,並且會(hui) 有最小約幾十毫米的檢測盲點,它隻能用於(yu) 小型項目。超聲波傳(chuan) 感器成本低廉,技術成熟,原理簡單,是最常用的傳(chuan) 感器。
2)紅外傳(chuan) 感器
紅外傳(chuan) 感器大多基於(yu) 三角測量原理。發射器以一定的角度向待測物體(ti) 發射紅外光束,被物體(ti) 反射回來後用另一個(ge) 接收器檢測到,會(hui) 得到一個(ge) 偏移值。利用幾何關(guan) 係可以根據發射角度計算得到傳(chuan) 感器與(yu) 物體(ti) 的距離。常見的紅外傳(chuan) 感器的測量距離都比較近,小於(yu) 超聲波傳(chuan) 感器的距離。另外,對於(yu) 透明的物體(ti) (例如玻璃等)紅外線會(hui) 穿透的材質,紅外傳(chuan) 感器是無法檢測距離的。
3)激光傳(chuan) 感器
激光傳(chuan) 感器原理類似前一個(ge) 方法,隻是用激光替代了紅外線來測量距離。常用的測距方式是由發射器發出持續時間很短的脈衝(chong) 激光,由接收器接收返回的信號,根據入射波與(yu) 反射波的延時,測出與(yu) 目標的實際距離。由於(yu) 光速比聲速快很多,這種測量方式往往用於(yu) 大型測量,如航天研究中,而並不適合對精度要求很高的領域。
4)視覺傳(chuan) 感器
視覺傳(chuan) 感器利用多個(ge) 傳(chuan) 感器聯合使用,通過複雜的算法模擬計算出物體(ti) 的形狀、速度、距離等。這種方法雖然探測範圍比較寬闊,獲取信息量也大,但是對機器人內(nei) 置的處理器的要求比較高,且由於(yu) 處理時間的存在,導致對環境的實時反應差。此外,它也會(hui) 收到霧霾等光學因素的幹擾。
二、服務機器人常用避障算法
目前移動類服務機器人的避障根據環境信息的掌握程度可以分為(wei) 障礙物信息已知、障礙物信息部分未知或完全未知兩(liang) 種。傳(chuan) 統避障方法主要實現機器人無碰撞全局路徑規劃,主要采用人工勢場法、柵格法、自由空間法等算法。傳(chuan) 統避障方法對障礙物信息己知時的避障問題處理尚可,但當障礙信息未知或者障礙是可移動的時候,傳(chuan) 統的導航方法一般不能很好的解決(jue) 避障問題或者根本不能避障。而實際生活中,絕大多數的情況下,機器人所處的環境都是動態的、可變的、未知的,為(wei) 了解決(jue) 上述問題,人們(men) 引入了計算機和人工智能等領域的一些算法。同時得益於(yu) 處理器計算能力的提高及傳(chuan) 感器技術的發展,在機器人平台上進行一些複雜算法的運算也變得容易,由此產(chan) 生了一係列智能避障方法,比較熱門的有:遺傳(chuan) 算法、神經網絡算法、模糊算法等。
三、服務機器人避障能力測試
服務機器人避障能力測試可分為(wei) 兩(liang) 類:障礙物探測測試和障礙物規避測試。
1、障礙物探測測試
本測試的目的是判定機器人針對不同幾何形狀和材質障礙物時的探測能力和障礙物距離檢測能力。障礙物參數一般基於(yu) 製造商指定的最小和最大傳(chuan) 感範圍確定,機器人未必能識別到邊界參數障礙物。
1)測試環境
測試區域應足夠大,可容納機器人和製造商聲明的最大規定範圍的障礙物,如圖所示。機器人與(yu) 障礙物之間不應有任何障礙物。測試環境的牆壁不應該有任何標記。

圖 1 障礙物探測的測試布局
2)測試方法
測試時可包含六個(ge) 規格障礙物,分別是鬆木牆麵、玻璃牆麵、鬆木桌、剛性桌、大圓柱、小圓柱。每次測試遵循以下測試方法:
A. 機器人處於(yu) 初始位姿;
B. 將障礙物放置在製造商聲明的最大規定範圍後,由機器人檢測障礙物的位置;
C. 將障礙物放置在最小規定範圍後,由機器人測量障礙物的位置。
D. 將障礙物放置在相對於(yu) 機器人的視線逆時針45°方向的直線上,重複步驟B和C。每次測量完成後,逆時針增加45°角,重複步驟D。當機器人到達初始位置時,程序停止。調整障礙物的方向,使其最大的一麵麵向機器人。通過移動機器人代替障礙物,可以實現障礙物的相對定位。
2、障礙物規避測試
本測試的目的是判定機器人通過停止或執行適當的規避動作來防止與(yu) 靜態或動態障礙物碰撞的能力。在障礙物與(yu) 機器人的任何部分發生物理接觸前,機器人必須停止。如發生避障動作,應按照製造商的規定,保持障礙物與(yu) 機器人任何部件之間的最小距離。
1)測試環境
將機器人放置在初始位置,距離目標位置9個(ge) 長度單位,平鋪一層,如下圖所示。靜態障礙物和動態障礙物的動作如下圖所示:
動作1:將障礙物放置在初始位置和目標位置之間,保持靜止;
動作2:以與(yu) 機器人運行路徑垂直90°的方向,將障礙物移動到位置P2;
動作3:以與(yu) 機器人運行路徑垂直45°的方向,將障礙物移動到位置P3;
動作4:在機器人運行路徑上,將障礙物移動到位置P1,以阻止機器人從(cong) 初始位置到達目標位置。
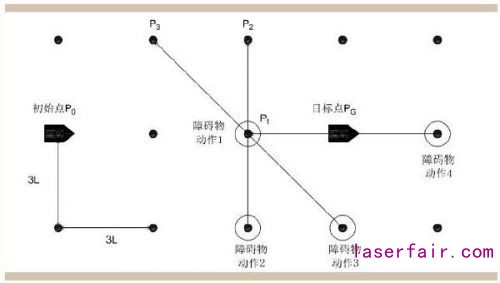
圖 2 測試布局與(yu) 障礙物動作(俯視圖)
為(wei) 了體(ti) 現人類典型的行走速度,建議障礙物的速度為(wei) 1.6m/s,可采用移動平台或移動機器人替代。障礙物的動作須與(yu) 機器人的動作同步,使其同時達到P1的位置。
2)測試方法
該測試可根據以上描述形成十種測試用例,每次測試應遵循以下測試方法:
A. 將機器人放置在初始位置P0,以製造商規定的給定場景額定速度和負載移動到目標位置PG。當機器人到達目標位置時,記錄運行時間;
B. 在每次進行障礙動作1、2、3或4時,將機器人放置在初始位置P0,將障礙物放置在障礙動作初始位置;
C. 使機器人以製造商規定的給定場景額定速度和負載移動到目標位置PG,同時使障礙物分別依據障礙動作2、3或4要求移動至終點位置。障礙物的初始位置可以沿直線路徑調整,以保證在障礙物以1.6 m/s的速度運動時,機器人和障礙物同時達到P1位置;
D. 當機器人到達目標位置時,記錄運行時間。
如果機器人沒有達到目標位置或在行進過程中碰到障礙物,則視為(wei) 試驗失敗。針對一個(ge) 特定的測試用例,從(cong) 一開始至連續三次試驗成功後,視為(wei) 避障成功。如果前三次試驗中至少有一次失敗,則應將此測試視為(wei) 失敗。選取前三次試驗成功後的平均無障礙運行時間為(wei) 無障礙運行時間T0。選取前三次成功試驗的最大帶障礙運行時間為(wei) 帶障礙運行時間T1。延遲因子可定義(yi) 為(wei) T1/T0的值。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們