




對於(yu) 著陸型航天探測任務,在著陸過程中實時了解自己相對於(yu) 地表的距離和方位至關(guan) 重要,這關(guan) 係到著陸任務是否能在對應的高度開展預定操作,也關(guan) 係到能否安全著陸。激光測距儀(yi) 是著陸過程中探知自身位置的常見配置。
JAXA的小行星“龍宮”采樣返回任務隼鳥2號攜帶的四大科學儀(yi) 器之一就是激光測高計LiDAR。

隼鳥2號的LiDAR。激光光束經擴束器放大後發出,再衝(chong) 小行星表麵反射回來。通過測量往返時間來計算探測器到龍宮表麵的距離 | JAXA
LiDAR連續掃描小行星,記錄下探測器到每個(ge) 掃描點的距離,這些測距信息結合光學ONC相機拍攝的龍宮表麵照片,就可以幫助隼鳥2號建立更高質量的全球三維地形模型。
 隼鳥2號LiDAR結合光學相機影像獲取龍宮全球三維地形信息 | JAXA
隼鳥2號LiDAR結合光學相機影像獲取龍宮全球三維地形信息 | JAXA
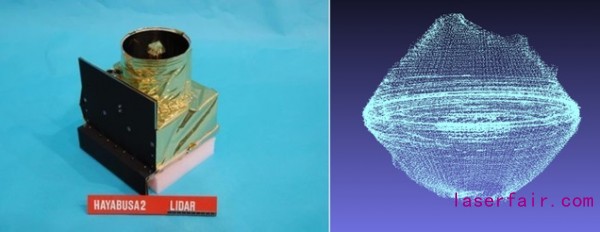
隼鳥2號的LiDAR和小行星“龍宮”掃描點雲(yun) | JAXA
除了用來獲取全球地形數據之外,LiDAR測距還會(hui) 用於(yu) 探測器著陸過程的導航定位,幫助探測器在降落過程中實時掌握與(yu) 地表的距離,這對探測器的安全著陸至關(guan) 重要。隼鳥2號在著陸采樣過程中就是以激光測距作為(wei) 主導航定位手段的。
實際操作中,隨著距離小行星表麵越來越近,LiDAR接收激光的敏感度也會(hui) 隨著距離變化。隼鳥2號針對不同高度采用了兩(liang) 種激光測距手段:50米高度以上使用常規的LiDAR激光測距,50米高度以下,係統會(hui) 根據接收激光的敏感度有一次自主調節,從(cong) 常規LiDAR切換到近距離激光測距LRF。
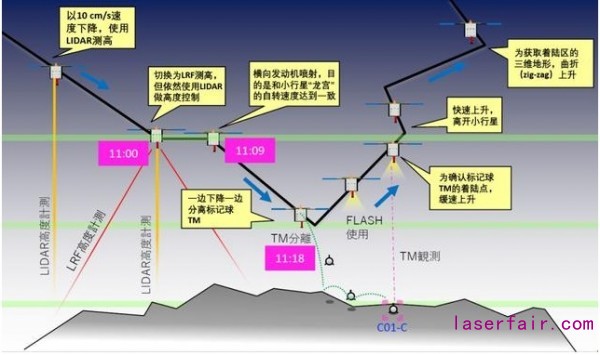
2019年5月30日,隼鳥2號為(wei) 第二次著陸采樣的演習(xi) PPTD-1A中丟(diu) 下標記球的過程,圖中時間是日本時間 | JAXA [1]
激光測距在隼鳥2號的兩(liang) 次著陸采樣和多次下降觀測中立下了汗馬功勞,隼鳥2號的第二次著陸采樣點甚至隻偏離了預定著陸點區中心60厘米!(第一次是差了1米)
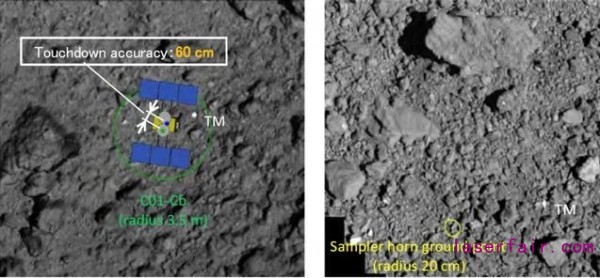
(左)JAXA隼鳥2號第二次著陸點(藍點)和計劃著陸區C01-Cb的中心(綠點)的位置;(右)隼鳥2號采樣杆接觸點的位置(黃圈)| JAXA [2]
LiDAR也在我國嫦娥三號、四號的落月過程中起了重要作用。兩(liang) 個(ge) 著陸器都攜帶了由上海技物所研製的激光測距敏感器和激光三維成像敏感器,前者用於(yu) 降落期間的測距,從(cong) 距月麵約15公裏處開始工作,後者與(yu) 激光測距儀(yi) 協同工作,用於(yu) 懸停避障階段的月麵特征識別和避障,在距月麵約100米處的懸停操作階段工作。
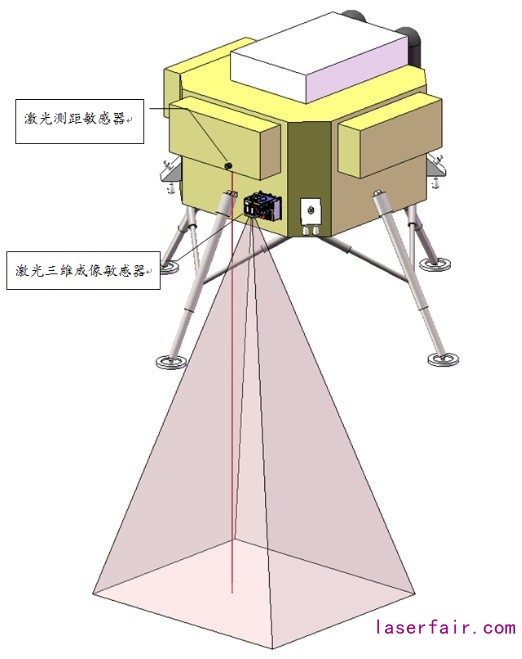
嫦娥三號、四號激光測距工作示意圖 | 中科院 [3]
和隼鳥2號的LiDAR類似,NASA的小行星“貝努”采樣返回任務OSIRIS-REx(冥王號)攜帶的激光測高計(OLA)也是LiDAR掃描儀(yi) ,它幫助冥王號在環繞小行星貝努的一年多時間裏,建立了貝努全球的高清三維地形模型。
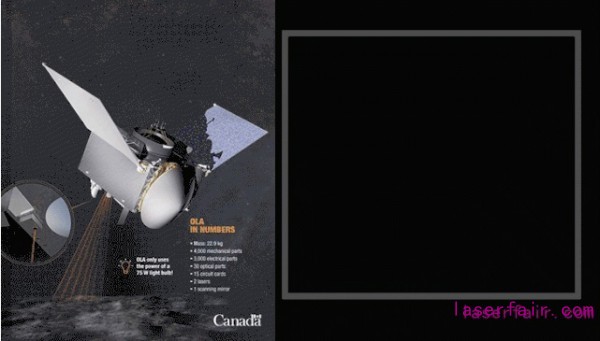
(左)冥王號的激光測高計(OLA)| 加拿大宇航局 (右)OLA獲取的小行星貝努3D地形模型,越紅越高,越藍越低 | NASA/University of Arizona/CSA/York/MDA
冥王號起初也是打算使用LiDAR作為(wei) 著陸采樣階段的主導航定位技術來著:除了掃描式LiDAR——激光測高計(OLA),冥王號還配備了一台3D快閃LiDAR用於(yu) 降落過程中的測距和定位。
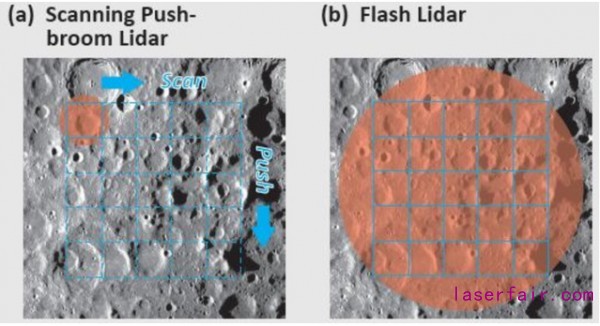
掃描式LiDAR vs 快閃式LiDAR | 參考文獻 [4]
冥王號用於(yu) 輔助降落的快閃LiDAR長這樣▼

冥王號的ASC LiDAR | 參考文獻 [5]
然而到地兒(er) 一看才發現,貝努表麵超出預料得崎嶇多石,探測器根本沒地兒(er) 下采樣杆。為(wei) 了落得更準,NASA最終放棄了LiDAR,改用了另一套基於(yu) 光學影像的備用導航定位方案——自然特征跟蹤(Natural Feature Tracking,NFT)技術。
這是後話了,我們(men) 下期再聊~
參考資料
[1] https://www.hayabusa2.jaxa.jp/enjoy/material/press/Hayabusa2_Press20190611_ver6a.pdf
[2] https://www.hayabusa2.jaxa.jp/enjoy/material/press/Hayabusa2_Press20190725_ver9.pdf
[3] 嫦娥三號“收官”:中科院任務執行完美https://www.cas.cn/zt/kjzt/ce3/jzjd/201312/t20131218_4000933.shtml
[4] Dissly, R., Weimer, C., Masciarelli, J., Weinberg, J., Miller, K., & Rohrschneider, R. (2012, October). Flash lidars for planetary missions. In Workshop on Instrumentation for Planetary Missions.
[5] Bierhaus, E. B., Clark, B. C., Harris, J. W., Payne, K. S., Dubisher, R. D., Wurts, D. W., ... & May, A. J. (2018). The OSIRIS-REx spacecraft and the touch-and-go sample acquisition mechanism (TAGSAM). Space Science Reviews, 214(7), 107.
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們