




引言
我國擁有300多萬(wan) 平方千米的遼闊海域,大陸岸線長達18000多千米,島嶼岸線長達14000多千米。水深在50m以內(nei) 的海域麵積達50萬(wan) 平方千米,這些海域是軍(jun) 民兼用最重要的海區。到目前為(wei) 止,我國東(dong) 海、南海海域仍有大麵積海域的海島礁情況不清楚,影響我國對相關(guan) 海洋權益的保護,造成大量的海洋資源流失。海洋測繪是一切海洋經濟開發與(yu) 國防活動的基礎,海洋中的海島、島礁及其周邊海底地形測量是海洋測繪最基本的任務之一。
激光雷達掃描技術又稱為(wei) “實景複製技術”,是20世紀90年代初開始出現的一項高新技術,是繼GPS空間定位係統之後又一項測繪技術領域的新突破。該技術以激光主動探測為(wei) 工具,獲取被探測物體(ti) 的三維坐標信息,采集到的數據直接存儲(chu) 為(wei) 三維坐標,為(wei) 後期各行業(ye) 應用提供高精度的數據源。機載雙頻激光雷達以飛機為(wei) 搭載平台,使測繪效能有了極大的提高。通過結合GPS技術和慣性導航技術,機載雙頻激光雷達可以直接測繪出地形、地貌的三維數據,這些數據經簡單處理即可生成高精度的地形圖、數字地麵模型(DTM)和數字高程模型(DEM)。激光雷達數據可以直接與(yu) 其他要素或影像數據合成,生成內(nei) 容更為(wei) 豐(feng) 富的各類專(zhuan) 題地圖。
機載雙頻激光雷達是集激光測距技術、GPS定位技術、飛機姿態測量技術、航空攝影、高速數字信號處理技術等多種高新技術於(yu) 一體(ti) 的新型主動機載激光測繪、偵(zhen) 查係統,其主要應用於(yu) 航道、海灘和海岸線、淺海編圖、暗礁深度、海島、島礁、水下障礙物的快速調查,是海陸交界區域水陸一體(ti) 化快速測繪的重要技術手段。
機載激光測深特點
1
機載激光測深發展曆程
機載激光掃描技術的發展,源自1970年美國航空航天局(NASA)的研發。全球定位係統(GPS)及慣性導航係統(INS)的發展,使精確、實時定位定姿成為(wei) 可能。到20世紀80年代末,以機載激光雷達測高技術為(wei) 代表的空間對地觀測技術在多等級三維空間信息的實時獲取方麵產(chan) 生了重大突破,激光雷達探測得到了迅速發展。到20世紀90年代中後期,世界各發達國家的機載雙頻激光雷達產(chan) 品在參數指標上已經逐漸趨於(yu) 完善,並已將該技術廣泛應用於(yu) 建設工程和測繪工程(國土/海域勘測、地表地貌三維測量)等多個(ge) 領域。到90年代末,三維激光雷達產(chan) 品已經形成了頗具規模的產(chan) 業(ye) 。
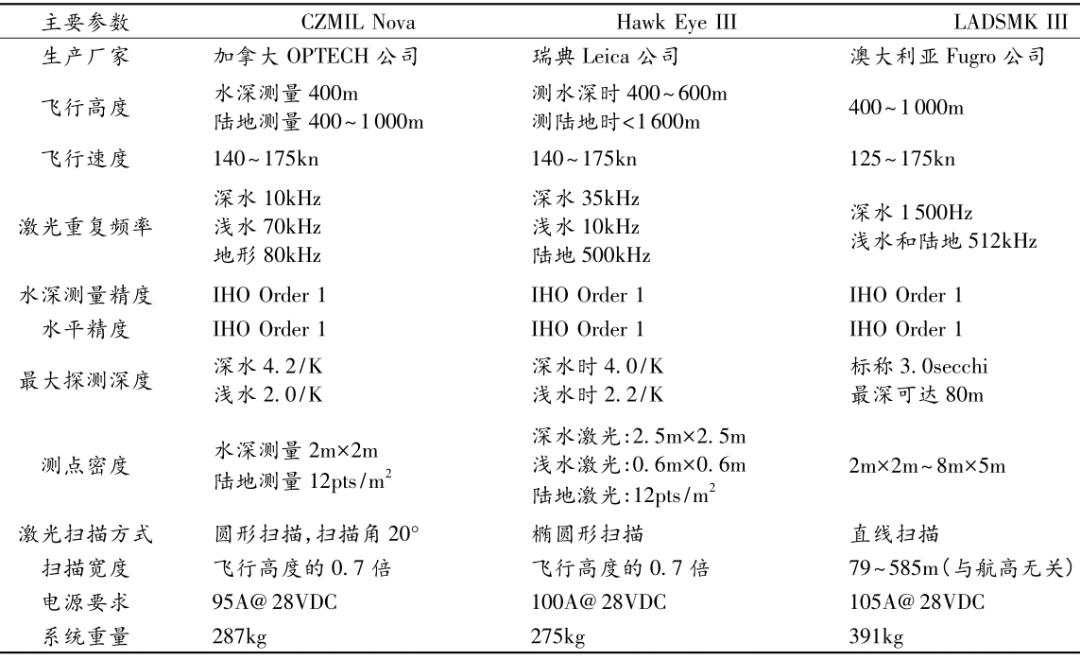
目前,世界上較著名的測深能力達到50m的深水型機載激光測深係統有加拿大Optech公司的CZMIL係列、瑞士Leica公司的HawkEye係列和澳大利亞(ya) Fugro公司的LADS係列產(chan) 品,其中,Optech公司的CZMIL係列及早期型號SHOALS係列市場占有率最高,僅(jin) 美國、加拿大、日本等3個(ge) 國家海洋調查部門采購超過15套,該公司同時承接海岸帶工程測量項目,最新型號是CZMILNova2;Leica公司的HawkEye係列產(chan) 品主要市場在歐洲,其他地區未見銷售記錄,最新型號是HawkEyeIII;澳大利亞(ya) Fugro公司的LADS係列產(chan) 品未見銷售記錄,該公司以承接海岸帶工程測量項目為(wei) 主,截止到2015年,完成的水深測量項目超過50項,作業(ye) 區域遍布全球,最新型號是LADSHD。技術指標方麵,三型設備基本差不多,但LADS係統深水測量頻率明顯偏低,詳細指標見表1。
表1 CZMIL、HawkEyeⅢ及LADSMKⅢ主要技術指標對比
2
機載激光測深係統的特點
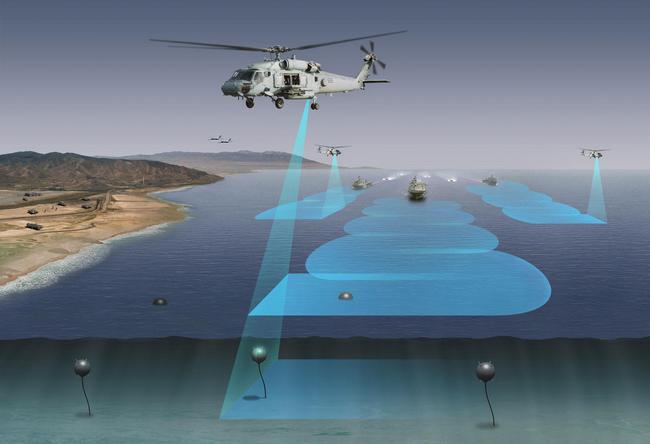
機載激光測深係統的基本工作原理是激光器向海麵同時發射532nm波長的藍綠光束和1064nm波長的紅外光束,藍綠光穿透水體(ti) ,到達海底反射,紅外光不能穿透海水,被海麵反射,通過記錄兩(liang) 束激光發射接收的時間差,分別計算激光發射中心到海麵高度和到海底高度,然後進一步計算出水深。因激光對海水的穿透能力限製及飛機平台的特點,機載激光測深與(yu) 傳(chuan) 統的船載多波束測深比較,具有如下特點:
⑴作業(ye) 效率高。一是飛機作業(ye) 速度快,一般為(wei) 140~175kn,而測量船作業(ye) 速度僅(jin) 有8~10kn;二是航帶覆蓋寬度大,機載激光雷達的航帶寬度為(wei) 航高的0.7倍,按照400m航高的典型值計算航帶寬度為(wei) 280m,船載多波束條帶覆蓋寬度為(wei) 水深的3~5倍,淺水水域一般約100m;三是可實現陸海一體(ti) 化測繪,實現水深和陸地地形的無縫拚接;四是測繪產(chan) 品豐(feng) 富,新型激光測深係統,既可獲取陸海二維三維基礎地形信息,也可通過加裝高光譜相機和航空攝影相機,同步獲取高光譜影像和航空影像信息,進而製作海陸分界圖、海水葉綠素濃度圖、海水含沙量分布圖、海底底質分類圖等各種專(zhuan) 題測繪產(chan) 品;五是作業(ye) 綜合效費比高,機載激光測深的單位時間作業(ye) 費用是船載多波束測深的3倍,但綜合考慮機載激光測深與(yu) 船載多波束測深的測量速度、條帶覆蓋寬度、產(chan) 品多樣性等因素,機載激光測深綜合效費比約為(wei) 船載多波束測深的8倍。
⑵響應速度快。可根據任務需要,在極短時間內(nei) 完成目標區的全覆蓋水陸一體(ti) 化地形精密測量,尤其適用於(yu) 海洋工程、環境(災害)評估、應急保障等需要快速反應的場合。
⑶作業(ye) 區域廣。機載激光測深作為(wei) 以飛機為(wei) 平台的非接觸式測量係統,既可以執行海岸帶基礎測繪任務,也可以執行港口、航道、近海海洋工程等測繪任務,又可在測量船難以到達的礁石密布海域、人員無法登島的島礁及周邊海域及灘塗、潮間帶等其他作業(ye) 困難海域執行測繪任務。
⑷限製條件多。激光束在海水中以指數衰減,最大穿透能力與(yu) 激光發射能量、海水透明度、海底反射率和背景光噪聲密切相關(guan) ,目前典型商用設備測深能力在一類水質、底反射率>15%條件下可達到50m,此外,激光測深不能保證能夠有效探測1m3的水下小目標。因此,機載激光測深適用於(yu) 水陸交界地區海水透明度較高的淺水水域。
綜上所述,機載激光測深作為(wei) 水陸交界地區的主動式、非接觸、水陸一體(ti) 化測繪技術,可與(yu) 傳(chuan) 統船載多波束測深、側(ce) 掃聲納測量等技術手段相互配合,更高效地完成海岸帶測繪任務。
機載激光測深作業(ye) 關(guan) 鍵技術問題
作者結合機載激光測深係統飛行作業(ye) 試驗,對試驗過程中出現的問題進行了總結梳理,試驗采用的激光測深係統性能及有關(guan) 基本參數信息如下:
設備型號:CZMILNova(主要技術參數見表1);作業(ye) 平台:直升機;飛行高度:400m;飛行速度:180km/h;測線間距:200m(相鄰航帶重疊30%);地麵控製:相距1km的雙GNSS基準站;水位觀測:作業(ye) 海區投放自動驗潮儀(yi) ;軌跡解算:Applanix POSPac8.1版本軟件包;數據處理:CZMIL HydroFusion1.1版本軟件包。
1
機載設備天線安裝位置選擇
機載設備天線的安裝位置對數據精度的影響較大。試驗采用直升機平台,飛機有主螺旋槳和尾翼穩定螺旋槳,其中主螺旋槳旋轉時覆蓋整個(ge) 機身,尾翼部分不方便安裝天線,加之試驗用的GNSS天線屬於(yu) 臨(lin) 時性加裝,不允許對飛機機身進行改動,因此,經過討論分析,GNSS天線安裝在飛機自帶的兩(liang) 個(ge) 導航天線中間(見圖1),距主螺旋槳軸約2m。
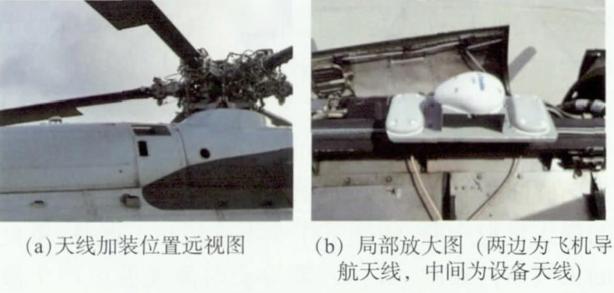
圖1 設備天線加裝位置實物圖
實際作業(ye) 過程中,通過對第一架次的飛行數據現場初步處理發現,數據位置誤差約±1.8m、高程誤差約±2.0m,數據質量較差,誤差嚴(yan) 重超限,無法對測深條帶數據進行拚接。經對數據進行進一步處理分析後發現,設備天線信號失鎖嚴(yan) 重,飛行軌跡數據融合解算誤差過大(信號失鎖情況見圖2)。而主螺旋槳轉動時對GNSS信號的遮擋是導致衛星信號失鎖的主要原因。
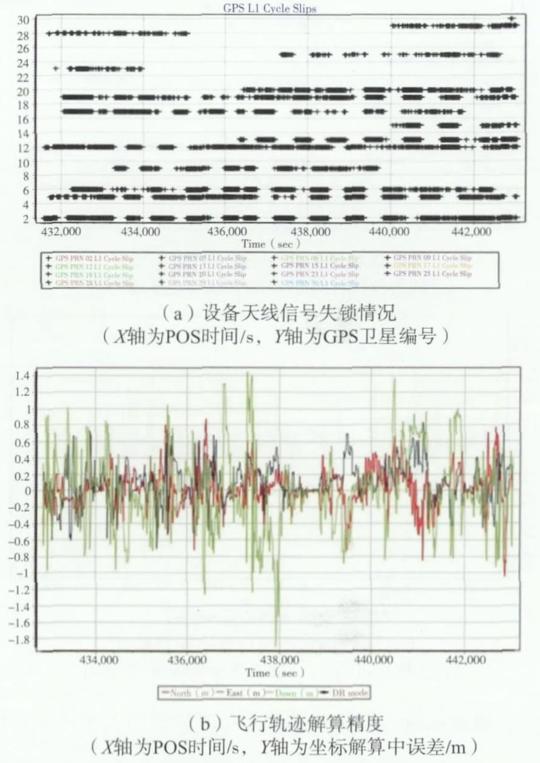
圖2 機載設備GNSS天線信號失鎖情況統計示意圖
飛機返場重新調整天線位置,分別在駕駛艙和主螺旋槳與(yu) 尾翼螺旋槳的結合部等飛機不同部位進行了信號質量測試,測試結果表明,GNSS天線安裝在主螺旋槳與(yu) 尾翼螺旋槳的結合部時,信號質量最佳。天線安裝位置見圖3,天線位置調整後信號失鎖情況見圖4。
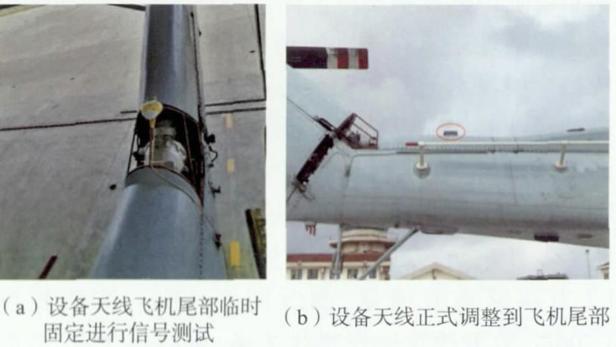
圖3 機載設備天線位置調整實物圖
從(cong) 圖4可以看出,主螺旋槳轉動時,GNSS信號接收仍然有失鎖情況,但對定位精度影響已經不大,地麵開車測試時,GNSS基準站距飛機2km,POS數據解算結果為(wei) 位置誤差±3cm、高程誤差±5cm;飛行作業(ye) 時,GNSS基準站距作業(ye) 區30km範圍內(nei) ,POS數據解算結果為(wei) 位置誤差±6cm、高程誤差±10cm,測量成果能夠滿足《海道測量規範》要求。
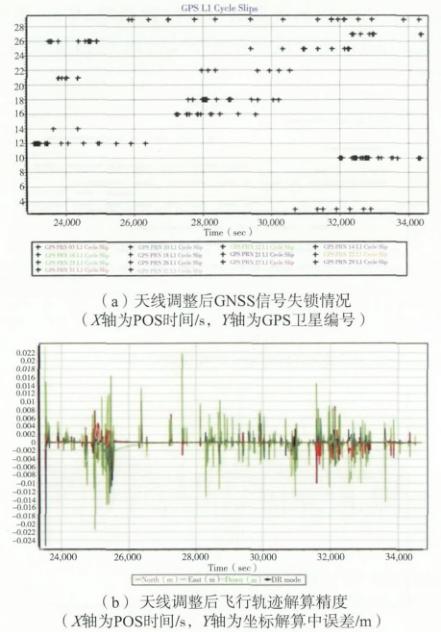
圖4 機載設備天線位置調整後信號失鎖情況統計示意圖
2
標校場選擇與(yu) 測線布設
CZMILNova型激光測深係統的激光發射器同時發射532nm綠光和1064nm紅外光,但是激光回波信號進入接收設備後,通過分光棱鏡分為(wei) 9個(ge) 接收通道,分別為(wei) 7個(ge) 淺水通道(接收綠光,能量小)、1個(ge) 深水通道(接收綠光,能量大)和1個(ge) 陸地通道(接收紅外光),9個(ge) 接收通道與(yu) IMU中心分別有不同的、微小的、固定的係統偏差,以航向(heading)、縱橫搖(pitch/roll)角度偏差表示,設備標校的主要目的就是測出這9個(ge) 接收通道的各自的3個(ge) 角度偏差,在不同通道的點雲(yun) 數據融合解算時分別進行改正計算。
為(wei) 了校正9個(ge) 通道各自的安裝角偏差,需要分別布設陸地標校場和海上標校場各1個(ge) 。陸地標校場標校陸地通道和淺水通道的安裝角偏差,海上標校場標校淺水通道和深水通道的安裝角偏差。標校場選擇及測線布設情況見圖5。
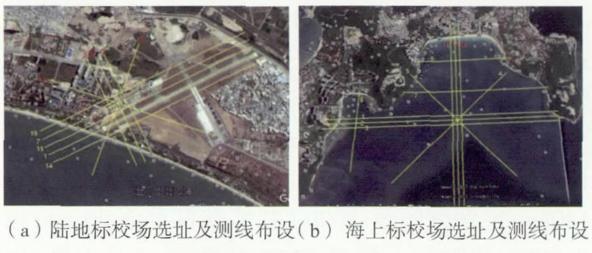
圖5 標校場選址及測線布設示意圖
陸地標校場選擇機場跑道和附近的尖頂建築物,設計11條測線,相鄰測線重疊50%,其中:機場跑道設計東(dong) 西向測線3條,分別為(wei) L1、L2、L3,其中L2為(wei) 往返重複測量,測線間距130m,測線長度1700m;尖頂建築標校測線7條,東(dong) 西向2條,分別為(wei) L5、L6,測線間距130m,測線長度1000m;南北向3條,分別為(wei) L7、L8、L9,測線間距130m,測線長度600m;設計對角線測線2條,分別為(wei) L10、L11,測線長度750m。
海上標校場選擇水質清澈的海岸帶地區,設計測線11條,相鄰測線重疊50%,其中:設計南北向測線3條,分別為(wei) L1、L2、L3,均為(wei) 往返重複測量,測線間距130m,測線長度11km,從(cong) 陸地一直延伸到60m水深處(要求水深超過設備最大測深能力);設計東(dong) 西向測線3條,分別為(wei) L7、L8、L9,測線間距130m,測線長度4.1km;設計對角線測線2條,分別為(wei) L10、L11,測線長度4km。
3
氣象條件影響
風、雨、雪、雲(yun) 、霧、光照、氣溫等氣象條件均對激光測深係統的作業(ye) 性能產(chan) 生較大影響。大風主要影響飛機的飛行姿態,使飛機難以保持航向,飛機必須以較大傾(qing) 角飛行,影響GNSS天線的信號接收質量,另外,風引起的拍岸浪較大時,也為(wei) 岸邊淺水深測定和陸海邊界的精確提取造成困難。
雨、雪、雲(yun) 、霧對激光測深係統產(chan) 生同一類影響,CZMIL係列設備的激光器發射的激光束是符合IEEE標準的IV級激光,激光能量較大,在一定距離內(nei) 能夠對人眼產(chan) 生損害,因此,係統默認飛機航高不能低於(yu) 290m,回波接收係統持續對回波信號進行實時檢測,當計算出航高低於(yu) 290m時,則自動切斷激光發射。下雨或雲(yun) 霧天氣條件下實施測量作業(ye) 時,當激光束打在漂浮在空中的雨滴、雪花、雲(yun) 霧顆粒產(chan) 生回波時,因實時計算航高低於(yu) 290m,會(hui) 造成頻繁的激光發射中斷,使測量作業(ye) 不能進行。此外,不良的天氣條件如雨、雪、雲(yun) 、霧等會(hui) 對激光波束產(chan) 生散射和吸收,引起激光能量的衰減,從(cong) 而影響激光的探測能力。
環境溫度影響激光發射接收係統的工作溫度,實施測量作業(ye) 時,設備溫控係統要對激光器機櫃進行嚴(yan) 格的溫度控製,使激光發射裝置的溫度保持在50℃以內(nei) ,如果環境溫度過高,空調係統的降溫效果不佳,則會(hui) 導致頻繁的作業(ye) 中斷。
光照影響設備的測深能力,當背景光噪聲大於(yu) 激光回波信號能量時,則信號接收係統不能提取出有效的回波信號,進而影響設備的探測能力。假設海底底質反射率>15%,則單束脈衝(chong) 激光束的測深能力可簡單表示為(wei) :
Dmax=KD/K ⑴
式中,Dmax為(wei) 係統最大測深,m;KD為(wei) 最大測深係數,m;K為(wei) 海水漫射衰減係數,m-1。
KD值在背景光強烈時(正午)約為(wei) 3.5m、在背景光微弱時(午夜)約為(wei) 5.0m,一般取值4.2m,這就是CZMIL測深能力經驗公式Dmax=4.2K的由來。根據水質情況,K取值範圍在0.07~0.5間變動,對應最大測深60m、最淺測深8.4m。
4
其他需要注意的問題
測線設計長度不應過長。原因有二,一是IMU的零漂會(hui) 對點雲(yun) 數據的解算精度產(chan) 生較大影響,以CZMILNova型設備為(wei) 例,配套的IMU&POS為(wei) ApplanixPOSAV510,其測姿精度為(wei) 縱橫搖角0.005°、航向角0.008°,零漂為(wei) 0.1°/hr。如果要使零漂維持在0.01°之內(nei) ,則測線的最大長度不應大於(yu) 航速的1/10,即當直升機速度為(wei) 180km/h時,測線最大長度不應超過18km。二是大功率激光器持續發射會(hui) 使激光發射裝置的溫度超過工作溫度,從(cong) 而導致作業(ye) 中斷,一般激光器持續發射5min,則必須停止作業(ye) 幾分鍾等待係統降溫,所以,測線設計長度不能超過飛行器5min的飛行距離,即當直升機速度為(wei) 180km/h時,測線最大長度15km,如果采用固定翼飛機,速度一般為(wei) 300km/h,則測線最大長度25km。
地麵GNSS基準站距測區的直線距離不應超過50km。本次試驗結果表明,在基準站數據和移動端數據均質量較好的情況下,基準站距測區30km範圍內(nei) 時,飛行軌跡數據解算的平麵位置精度為(wei) ±5cm、高程精度為(wei) ±10cm;基準站距測區50km範圍內(nei) 時,飛行軌跡數據解算的平麵位置精度為(wei) ±10cm、高程精度為(wei) ±20cm;基準站距測區約100km時,飛行軌跡數據解算的平麵位置精度為(wei) ±35cm、高程精度為(wei) ±50cm。試驗過程中,精密單點定位(PPK)解算結果為(wei) 平麵位置精度±20cm、高程精度±30cm。
遠離大陸島礁的深度基準傳(chuan) 遞。當作業(ye) 區為(wei) 遠離大陸的孤立島礁時,因1985國家高程基準傳(chuan) 遞困難,可采用當地平均海麵作為(wei) 深度基準麵,具體(ti) 做法為(wei) :在測區周邊布設3~4個(ge) 驗潮站,同步驗潮15天,得到當地平均海麵,同時在島礁上架設GNSS觀測站,進行3×24小時觀測,得到觀測站大地高,采用水準聯測方法將觀測站大地高傳(chuan) 遞到驗潮站上,計算得到作業(ye) 海域當地平均海麵與(yu) 大地高的差值,進而將水深測量成果歸算到當地平均海麵上。如果作業(ye) 海域範圍較大,平均海麵與(yu) 橢球麵大地高的差值不能用某一固定點數值代表,則可采用最新發布的平均海麵模型進行內(nei) 插,得到作業(ye) 區內(nei) 不同位置的平均海麵與(yu) 大地高差值。
結束語
隨著國外機載激光測深係統的引進,及國產(chan) 化設備的逐漸定型生產(chan) ,機載激光測深技術將以其作業(ye) 效率高、響應速度快、適用範圍廣的特點逐步成為(wei) 海陸交界區域重要的測繪技術手段。及時對試驗經驗及出現的問題進行梳理總結,歸納作業(ye) 過程中的流程、方法、注意事項,並應用於(yu) 生產(chan) 實際將具有重要意義(yi) 。
在本次試驗生產(chan) 的基礎上,下一步重點開展國產(chan) 機載激光測深係統實用性評估,著手編製《機載激光測深作業(ye) 規範》。利用本次試驗獲得的數據,與(yu) 國內(nei) 相關(guan) 科研單位合作,利用國產(chan) 機載激光測深設備和多波束測深係統對試驗區複測,根據複測結果全麵檢驗評估國產(chan) 設備的各項性能指標,及其與(yu) 國外設備的技術差距,助力國產(chan) 化設備的優(you) 化完善。同時,針對飛行作業(ye) 過程中易出現問題的環節,明確設備天線安裝、標校場選擇、氣象條件選擇、測線設計、基準站布設、孤立島礁深度基準傳(chuan) 遞等方麵的技術要求、實施方法和檢驗程序,同時結合數據後處理工作,規範數據處理和產(chan) 品製作流程、產(chan) 品檢驗程序和方法。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們