




與(yu) 普通機器人不同,微型機器人因其體(ti) 積的優(you) 勢,廣泛應用在微型物體(ti) 操縱和靶向給藥方麵,一直是探索癌症治療的一種針對性治療技術。
在生物應用中,為(wei) 了實現更複雜的微 / 納米藥物操作(例如封裝和釋放),解決(jue) 更多的微型操作技術難題,微型機器人需提高其適應動態環境的形狀變形能力。
01
遇酸釋放,靶向治療
日前,中國科學技術大學研究人員李佳文、張麗(li) 、吳東(dong) 及其同事開發出微型 3D 打印的機器人動物,可用於(yu) 直接向癌細胞輸送化療藥物,這將有助於(yu) 減弱藥物副作用,提高治療能力。研究人員所追求的應用包括使用體(ti) 外磁鐵將微型機器人引導到實體(ti) 腫瘤,然後腫瘤的天然酸性微環境刺激形狀變化,導致化療藥物的局部釋放。
在此之前,研究人員已經開發出可以操控微型物體(ti) 的機器人(小於(yu) 100 m),但大多數機器人隻能操控其行蹤,無法根據複雜的任務改變它們(men) 的形狀(例如釋放藥物)。一些研究團隊製造出了 4D 打印物體(ti) (利用 3D 打印設備,可根據某些刺激改變形狀,這種能力增加了一個(ge) 額外的 " 維度 ",並促使中國團隊將該過程描述為(wei) 4D 打印)。但它們(men) 通常隻能執行簡單的動作,並且無法實現遠程控製。
為(wei) 解決(jue) 上述問題,研究人員希望能夠開發出變形的微型機器人,可以通過磁鐵引導其到人體(ti) 特定部位進行治療。由於(yu) 腫瘤存在於(yu) 酸性微環境中,研究小組決(jue) 定讓微型機器人改變形狀以適應低 PH 值的酸性環境中。這一成果,向微型機器人在生物醫學應用邁出重要的一步,該研究成果以論文形式發表在 ACS Nano 上。
02
形狀多變,外觀太 Q 萌
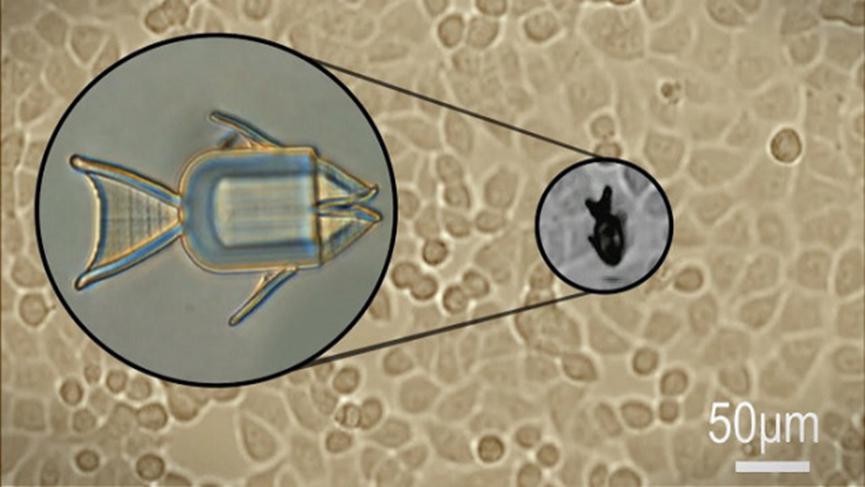
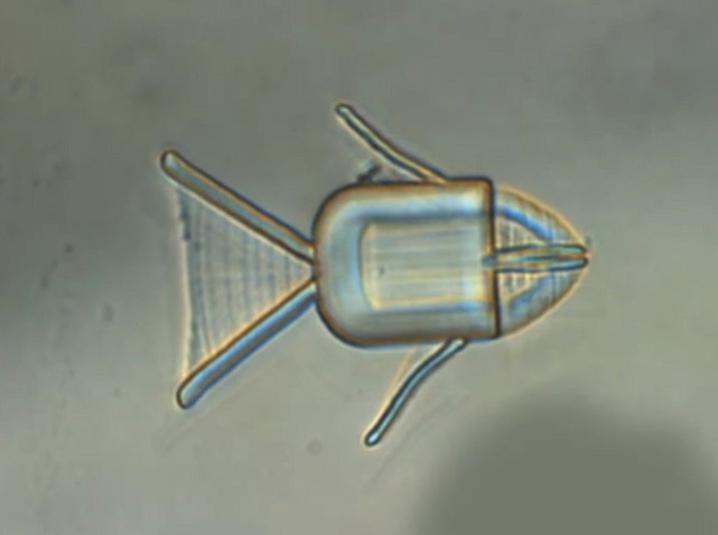
研究中微型機器人由水凝膠(對 PH 值敏感)經 3D 打印成不同的動物形狀,例如魚、螃蟹和蝴蝶等,水凝膠表麵多孔隙,用於(yu) 攜帶顆粒。同時,研究人員在特定區域(例如蟹爪或魚嘴)改變了機器人的打印密度。故而,這些區域可以按照環境酸度的改變而開或關(guan) 。
另一個(ge) 挑戰涉及微型機器人的移動,例如目標將其引導至實體(ti) 腫瘤部位。為(wei) 了解決(jue) 此難題,研究人員將思路轉向了磁鐵。他們(men) 通過將微型機器人浸泡在氧化鐵納米顆粒的懸浮液中來磁化微型機器人,以便磁鐵來移動微型設備。這意味著當微型機器人在體(ti) 內(nei) 時,可以通過在人體(ti) 外部施加磁鐵或磁場來遠程和微創控製其行動。
在實驗室測試中,該團隊在一個(ge) 同樣含有癌細胞的培養(yang) 皿中的人造模擬血管中測試了微型機器人。他們(men) 成功地利用磁鐵操縱微型機器人穿過血管並趨向血管一端的癌細胞,他們(men) 降低了 PH 值以模擬腫瘤的天然弱酸性微環境。在微酸性的溶液環境中,如預期所示,魚嘴釋放出了藥物,並成功使癌細胞凋亡。在另一測試中,螃蟹形的微型機器人可以用蟹鉗夾住藥物納米顆粒,移動到目標位置並靶向釋放藥物。
這項技術對於(yu) 靶向遞送藥物提供了希望。未來,該團隊表示需要將微型機器人體(ti) 積做得更小,使得它們(men) 能夠穿過真正的血管,同時還需要探索一種利用身體(ti) 對其跟蹤的方法。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們