




生產基於MEMS的慣性導航係統,如加速度計和陀螺儀,可以使用定製的俯仰—旋轉兩軸萬向定位係統。該係統以兩個高精度Newport RV係列旋轉位移台為基礎,其中內部的位移台提供旋轉,外部的提供俯仰,以便MEMS加速度計在不同的位置相對地心引力的方向進行旋轉。
環境艙中的MEMS傳感器在自轉的同時,也相對地心引力的方向轉動。不同的傳感器對靈敏度和重複定位精度的需求不盡相同。

應用於(yu) MEMS加速度傳(chuan) 感器的Newport俯仰—旋轉萬(wan) 向定位係統,采用RV HAHLT旋轉台,設備組成和主要參數如下:

此外,Newport還提供多種用於(yu) MEMS傳(chuan) 感器測試的其他萬(wan) 向定位係統。
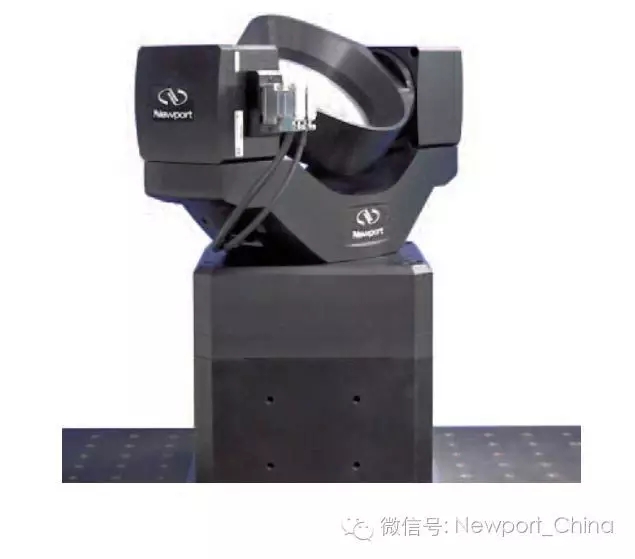
兩(liang) 軸高速運動模擬器
上圖為(wei) 兩(liang) 軸高速直驅萬(wan) 向定位係統,可通過一個(ge) 集成滑環,圍繞方位軸和俯仰軸進行360 ˚持續旋轉。Newport的這款新設計組合了直驅旋轉台、無刷高轉矩伺服電機和超高分辨率編碼器,可以保障高速度(最高720˚/s)、高加速度下的精密旋轉運動。如需了解更多該運動模擬器的相關(guan) 參數,請觀看如下視頻:(建議在wi-fi環境下觀看)

用於(yu) 調製車載安全傳(chuan) 感器的11軸電動位移控製係統
上圖的多軸集成係統用於(yu) 測量和記錄車輛圍繞垂直軸方向(偏擺)的角速度和角加速度,輪胎的轉速,以及方向盤或變速器的力矩大小,從(cong) 而維持車輛穩定並減振。

方位角—仰角全軛架
上圖為(wei) 方位角—仰角萬(wan) 向設計,其中仰角子係統固定於(yu) 方位角旋轉台上,提供兩(liang) 個(ge) 正交的旋轉軸。該設計中,傳(chuan) 感器首先相對俯仰軸旋轉,再相對方位軸旋轉,也可以根據需求加入一個(ge) 與(yu) 俯仰軸正交的翻滾軸。

Newport各種其他萬(wan) 向定位設計
上圖展示了其他各種萬(wan) 向係統,由Newport RV係列和URS係列位移台組合而成,分別對應不同的載荷和定位需求。Newport可以根據您特定的傳(chuan) 感要求定製萬(wan) 向定位係統,在最小運動增量、重複定位精度、絕對精度、速度和價(jia) 格等參數上提供最適合您的解決(jue) 方案。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們