




但Uber 的自動駕駛汽車
直到撞擊仍未進行減速
這是一篇專(zhuan) 業(ye) 技術人士
根據有限的證據和可信度極高的推理進行的事故還原
並非百分百真相
不妨一看

美國時間上周日晚,北京時間本周,美國亞(ya) 利桑那州坦佩市(Tempe, AZ) 發生了一起自動駕駛汽車撞死行人的嚴(yan) 重事故。在事發後當天,矽星人(PingWest品玩旗下矽穀賬號)整理了來自警方和當地媒體(ti) 播報的,有限的公開信息。
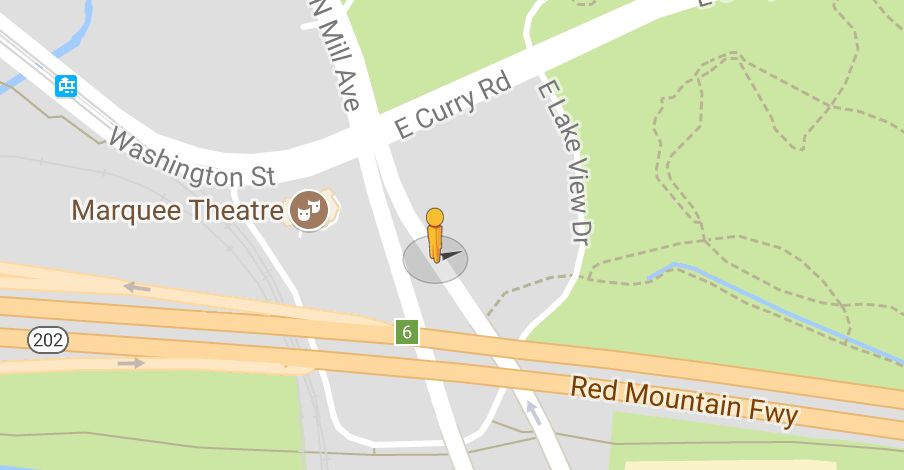
事發地點在坦佩市N Mill Ave 上——更具體(ti) 來說,這條南北向道路和前方東(dong) 西向E Curry Rd 交接路口的南邊約200-300 英尺的位置。
死者為(wei) 49 歲的Elaine Herzberg,事發時推著一輛紅色的自行車,由這條馬路的西側(ce) 橫穿馬路向東(dong) 步行,在行至由南向北車道的最右側(ce) 車道時遭遇涉事Uber 自動駕駛汽車撞擊。Herzberg 被送到醫院之後身亡。
我們(men) 用Google 地圖街景重現當時的場景。下圖中黃人所在的就是事發地點,黃人的麵向則是死者當時的行進方向:
而這是事發地點的街景照片:

注意這張圖中道路左側(ce) 的禁止行人橫穿馬路標誌和道路右側(ce) 馬路牙子上的排水口,Herzberg 步行的路線大約就是從(cong) 前者到後者。


這裏劃重點(1),後麵詳述。
涉事車輛則為(wei) 一輛沃爾沃XC90 SUV,由Uber 改裝並增加了一套完備的自動駕駛功能。此處劃重點(2),之後詳述。
昨天,坦佩市警方放出了事故目前已知唯一的視頻記錄。視頻來自於(yu) 涉事車輛本身的行車記錄儀(yi) 抑或自動駕駛係統的錄像工具,共有兩(liang) 個(ge) 機位,一個(ge) 在車外向前,拍到了受害者被撞的瞬間;第二個(ge) 機位則在相同位置但對著車內(nei) ,拍到了車輛當時上麵唯一的安全駕駛員,44 歲的女性Rafael Vasquez。此處重點(3)。
以下是警方公布的視頻,由國內(nei) 的觀察者網轉載並重新上傳(chuan) 。請注意,畫麵可能會(hui) 引起不適:
事發道路的限速為(wei) 35mph,而事發時涉事車輛的車速為(wei) 40mph。在美國,道路超速屬於(yu) 違法,但量罰的決(jue) 定權在於(yu) 警察。而另有一條規則規定車輛不得速度太低阻塞交通,因此略微超速在美國是很常見的現象,大部分警察不會(hui) 太過追究。從(cong) 車速上來看,Uber 方麵的過錯不大。
事發後的第一天,警方指出目前調查還在進行中,警方暫未確認事故的責任。但已有的證據顯示,死者在非人行過街道,而且還時標有警示標誌的位置過馬路,根據亞(ya) 利桑那州法律,此時涉事自動駕駛汽車享有路權。在發布會(hui) 上警方一度稱呼死者為(wei) 受害者(Victim),隨後很快改口稱行人(Pedestrian),為(wei) “汽車無責”的推斷提供了線索。
但這輛自動駕駛汽車,它的安全駕駛員,以及Uber 方麵,就真的沒有過錯嗎?
就事論事,的確如此。但根據目前有限的證據,依據自動駕駛研究領域內(nei) 普遍的知識和原則判斷,這次事故體(ti) 現出Uber 方麵很可能存在嚴(yan) 重的違規甚至違法操作自動駕駛汽車的問題。
列一下剛才劃的重點:
1)死者過馬路的位置
2)涉事車輛的自動駕駛功能
3)安全駕駛員
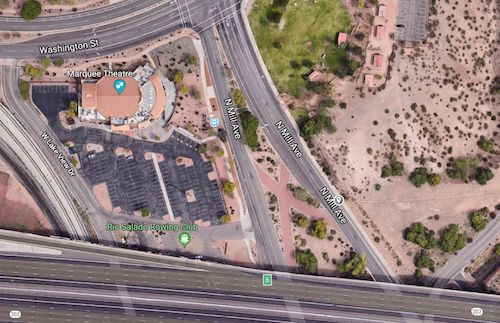
重點一:如前述,死者過馬路的位置是絕對禁止過馬路的地點。如下圖示,N Mill Ave 的雙方向兩(liang) 條車道分隔開,中間是一個(ge) 綠化區域,死者正是從(cong) 這個(ge) 綠化區域向東(dong) 穿行:
讓我們(men) 再回顧一下車載記錄到的事發畫麵:

可以看到在撞擊發生之前,車輛剛先後經過了左右各一根燈柱。兩(liang) 顆燈柱的亮度,加上汽車本身的大燈,似乎無法照亮正在推自行車橫穿馬路的行人。
但請記住,大部分情況下,人眼在夜間的寬容度是比攝像機更高的。
前電子前線基金會(hui) 主席,自動駕駛技術專(zhuan) 家Brad Templeton 指出,幾乎所有自動駕駛汽車——包括Uber——通常會(hui) 配有多種視覺攝像頭,其中應該包括高動態範圍的常規視野攝像頭。實現高動態的方式可以是不停變換光圈,也可以是兩(liang) 個(ge) 不同曝光度的攝像頭。這種攝像頭的作用,正是在環境明暗發生劇烈變化時拍清楚畫麵。
但在這起事故中,視頻顯示顯然畫麵中汽車的大燈和燈柱導致畫麵明暗對比太明顯,以至於(yu) 沒有拍到撞擊發生前數秒內(nei) ,死者馬路的左邊車道向前走的動作。
這有可能意味著1)Uber 自動駕駛汽車沒有配備這種高動態範圍的攝像頭2)Uber 沒有打開高動態範圍攝像頭;3)Uber 還未提供或警方還未公布其它攝像頭的畫麵。
但這個(ge) 攝像頭的問題,至多影響我們(men) 現在看到的視頻錄像的可觀性。它不大可能影響警方的取證、調查和決(jue) 定——亞(ya) 利桑那州高度歡迎自動駕駛汽車測試並提供了法律條件,在警察眼中自動駕駛汽車和普通汽車並無區別。警方通常就事論事,隻關(guan) 心這一起案件到底是誰的責任。
但我們(men) 應該關(guan) 心更多。
重點二:問題很有可能出在了自動駕駛係統上。
絕大部分自動駕駛汽車——包括Uber——其配備的大量攝像頭和各類傳(chuan) 感裝置中,都配備有一個(ge) 名叫激光雷達的裝置。
根據百科,激光雷達(Light Detection and Ranging,簡稱LiDAR) 和雷達的工作原理類似,都是靠發出接受反射回來的脈衝(chong) 來偵(zhen) 測物體(ti) 和測距,區別在於(yu) 雷達發射電波,而激光雷達發射激光。在自動駕駛領域,激光雷達應用已經十分流行,廣泛應用於(yu) 繪製車輛周圍的高精度三維地圖。
在自動駕駛汽車上,激光雷達就是那個(ge) 一直在高速旋轉的東(dong) 西。通過旋轉,這種定向的激光發射裝置可以覆蓋周圍360 度區域。

由於(yu) 激光的特性,它在任何亮度條件和幾乎任何天氣下都適用,最重要作用之一就是在夜間進行物體(ti) 和障礙偵(zhen) 測。通常在城市環境,自動駕駛汽車上的激光雷達的最遠有效距離可以達到200 - 300 米。
如果以40mph(約65km/h)的速度在道路上行進3 秒,距離大概是48 米。這個(ge) 距離顯然在激光雷達的有效偵(zhen) 測範圍內(nei) ,況且根據視頻,當時的道路上隻有涉事汽車和死者,並無其他車輛或行人;而以40mph 的速度行駛200 - 300 米,至少需要10 秒的時間。
也就是說,涉事汽車完全有能力在事發前3-10 秒時間偵(zhen) 測到道路上的異常行為(wei) 物體(ti) 。
那麽(me) ,涉事車輛的激光雷達緣何沒有偵(zhen) 測到後來的死者?
從(cong) 技術上講,激光雷達對不同顏色和材質的物體(ti) 偵(zhen) 測能力也有區別。比如黑到超級黑的某些材質衣服,就有可能吸收太多激光,導致激光雷達必須到近處才能讀到。而死者當時身穿的正是黑色的上衣。但死者的發色很亮,牛仔褲是藍色,自行車是紅色,降低了反射失靈這一種說法的可信度。
還有一種猜測認為(wei) ,當時激光雷達壓根沒有開啟。
當時,Uber 很有可能正在進行關(guan) 閉激光雷達實現自動駕駛的測試。這一猜測最一開始來自於(yu) 某個(ge) Uber 內(nei) 部的信源。
這一猜測無疑有理有據,因為(wei) Uber 和Google 的官司還在進行當中。Google 此前擁有一支超過10 年經驗的自動駕駛團隊,其中一人離開了公司創辦了自己的自動駕駛公司,隨後很快被Uber 收購。Google 擁有充分證據證明,該人從(cong) Google 帶走了關(guan) 鍵技術資料,因此以竊取知識產(chan) 權起訴了Uber。
而這些“關(guan) 鍵技術”的主要內(nei) 容,也即Google 和Uber 之間官司的主要內(nei) 容,正是激光雷達。即便最終判決(jue) 還未下達,Google 也完全可以要求法院對Uber 開出停終(cease and desist) 條令,直接限製了Uber 使用激光雷達的能力。這樣Uber 車上即便裝有激光雷達也無法打開,在黑天就變成了半個(ge) 瞎子。
這麽(me) 說是因為(wei) 車上畢竟還有攝像頭、常規雷達以及其他傳(chuan) 感裝置,而就算攝像頭曝光太低,也可以用雷達,它發射常規雷達波,不受亮度的限製,怎麽(me) 也能派上一點用場。
遺憾的是,從(cong) 目前的資料並結合雷達工作原理來看,雷達在這起事故中也完全沒起到作用。
自動駕駛汽車上雷達也是標配,在沒有激光雷達之前,它為(wei) 車輛提供一定程度的輔助駕駛功能——高速跟車等等。因此雷達的主要作用是在本車道內(nei) 進行障礙偵(zhen) 測和測距,別的車道跟它關(guan) 係不大。比方說你的車在高速路上定速巡航並打開了跟車,旁邊車道上有一輛車,你的車是沒有理由減速的。

雷達如果在別的車道偵(zhen) 測到了東(dong) 西,有很大幾率不會(hui) 誤報,而在本案中,我們(men) 假設雷達偵(zhen) 測到了行人,後者的行進速度相對汽車來說是很慢的,也就是說可能在5-10秒鍾——對於(yu) 自動駕駛係統來說很長時間內(nei) ——是在左邊一條或者兩(liang) 條車道的。
有些人可能會(hui) 問,有沒有熱成像,也即所謂的夜視攝像頭?事實上熱成像攝像頭用在自動駕駛汽車,需要車外放置且保持幹淨,保養(yang) 很麻煩,成本高的離譜。Uber 路測汽車是沒有夜視功能的。
激光雷達沒有開;雷達沒偵(zhen) 測到或偵(zhen) 測到了但認為(wei) 無威脅;常規攝像機動態對比度太低沒看到人:也就是說,這輛自動駕駛的汽車在自動駕駛的部分,幾乎所有關(guan) 鍵的畫麵捕捉和傳(chuan) 感偵(zhen) 測部件,都以不同的方式“失靈”了。以至於(yu) 直到撞擊發生,汽車都沒有任何減速動作。
重點三:安全駕駛員的存在作用,在本案中完全沒有體(ti) 現出來。首先,自動駕駛汽車進行公開道路路測,需要至少兩(liang) 名安全駕駛員,通常副駕監控計算機係統,而主駕的注意力需要完全放在路上。雖然自動駕駛汽車立法還未完善,但理論上操控一台自動駕駛汽車,主駕需要像駕駛普通汽車一樣保持注意力。
可以說行業(ye) 的慣例是至少兩(liang) 人。如前述,主駕或許不需要太強的計算機背景,隻需開好車,在出現情況時及時接管即可。Uber 是一個(ge) 獨特的案例:大部分時候車上隻有一個(ge) 人。
而且在本案中這位安全駕駛員的身份也比較特殊:Rafael Vasquez,曾因持槍搶劫未遂和向政府提供虛假信息坐牢三年零十個(ge) 月。這一切發生在十多年前,從(cong) 2005 年出獄後Vasquez 的記錄一直是幹淨的。即便如此,在美國隻要候選人有案底,很多工作崗位都不會(hui) 接納,但Uber 在這件事上反而做的很好,它有一個(ge) 包容性的招聘政策,“任何人都應該得到第二次機會(hui) 。”
顯然,在此時,Uber 的包容性招聘策略稱為(wei) 了它的負累。
然而Vasquez 在出獄13 年後遭遇了人生的又一次低穀。她的疏忽間接導致了Herzberg 的死亡。亞(ya) 利桑那州法律規定,駕駛員必須謹慎行事,避免在任何道路上與(yu) 任何行人相撞,而在撞擊發生前的十秒內(nei) ,Vasquez 一直盯著視線右下,可能是手機或者車載顯示屏,中間隻有一次抬頭。在她第二次把頭低下後沒多久,撞擊就發生了。
Vasquez 沒有將注意力一直放在路上,屬於(yu) 瀆職行為(wei) 。這份聽起來相當高大上的科技公司工作是保不住了,不僅(jin) 這樣,如果警方根據視頻對其判定責任,她也有可能將麵臨(lin) 法律的製裁。類似的事情發生了太多,而注意力、駕駛疲勞也屬於(yu) 自動駕駛希望解決(jue) 的問題。
顯然和Vasquez 相比,Uber 招聘、訓練自動駕駛安全駕駛員的政策,乃至於(yu) Uber 對於(yu) 自動駕駛汽車整件事情的態度,都會(hui) 成為(wei) 未來一段時間內(nei) 輿論的焦點。
最後再次聲明:本文為(wei) 根據已經公開的證據、資料,以及可信度較高的傳(chuan) 聞,結合常識和業(ye) 界普遍通行的規律進行的推理,一切最終以坦佩市警方以及參與(yu) 調查的美國立法下屬交通安全機構給出的報告為(wei) 準。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們