




導讀
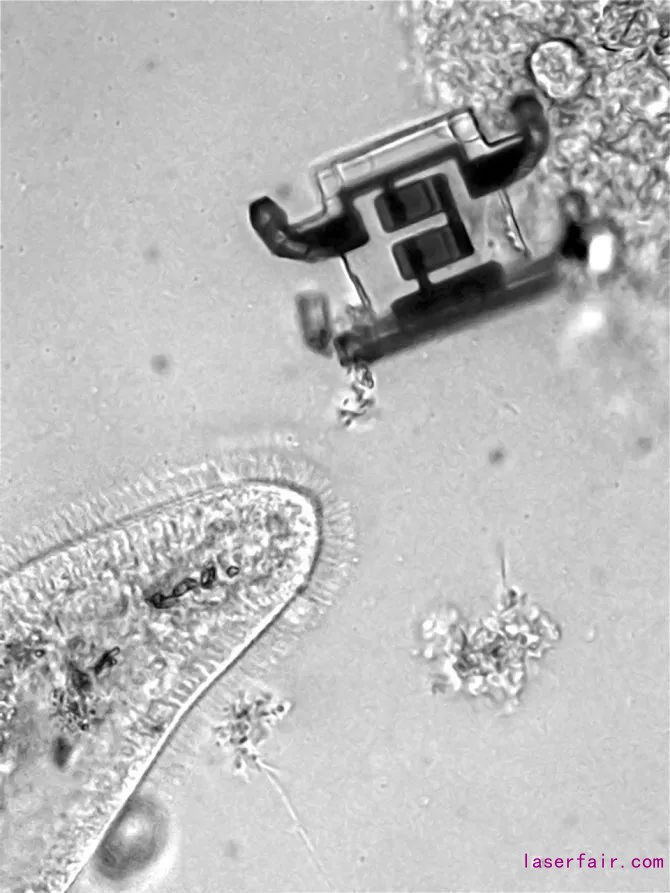
據美國康奈爾大學官網近日報道,該校研究人員領導開發出首個(ge) 含半導體(ti) 元件的微型機器人。該機器人的尺寸與(yu) 草履蟲相仿,可用激光控製其腿部行走。
背景
1959年,前康奈爾大學物理學家理查德·費曼(Richard Feynman)發表了著名的演講“《在底部還有很大空間》(There’s Plenty of Room at the Bottom)”。在這篇演講中,他描述了“微縮技術(shrinking technology)”的機遇,從(cong) 機器到計算機芯片再到極小的尺寸。

費曼率先提出將微型機器人應用於(yu) 醫療的想法,按照他的說法就是“吞下外科醫生”。這些“外科醫生”也就是微納機器人。受自然界微生物自由運動啟發,人類通過電場、磁場、光場等手段可以有效地驅動這些微納機器人。微納機器人在無創手術、靶向藥物運輸和生物傳(chuan) 感檢測等領域具有廣泛的應用。
可重構的微型機器人,由電磁場遠程控製,可在人體(ti) 內(nei) 運動,進行給藥或者手術。(圖片來源:EPFL/EPFZ)
將電子器件微型化以生產(chan) 細胞大小的微型機器人,一直是科學家們(men) 追求的目標。但由於(yu) 缺乏合適的微米級致動器係統,這項技術一直受到限製。十多年來,科學家們(men) 一直在努力開發可使微型機器人在體(ti) 液中行進的微米級致動器。
創新
近日,一項由美國康奈爾大學領導的合作創造出了首個(ge) 含半導體(ti) 元件的微型機器人,它由標準的電子信號進行控製,而且能夠行走。
這些機器人的尺寸與(yu) 草履蟲相仿,為(wei) 利用矽基智能構造更複雜的版本提供了模板。它們(men) 可以大規模生產(chan) ,有朝一日可以穿越人體(ti) 的組織和血液。
這項合作由康奈爾大學物理係教授伊泰·科恩(Itai Cohen),物理科學教授保羅·麥克尤恩(Paul McEuen)以及他們(men) 的前任博士後研究員、現任賓夕法尼亞(ya) 大學助理教授的馬克·米斯金(Marc Miskin)領導。
團隊的論文“《電子集成、可大規模生產(chan) 的微型機器人》(Electronically Integrated, Mass-Manufactured, Microscopic Robots)”於(yu) 8月26日發表在《自然》雜誌上。
技術
這款行走的機器人是在科恩與(yu) 麥克尤恩此前研發的納米機器的基礎上演變而來的,從(cong) 微型傳(chuan) 感器到石墨烯基折紙機器人。
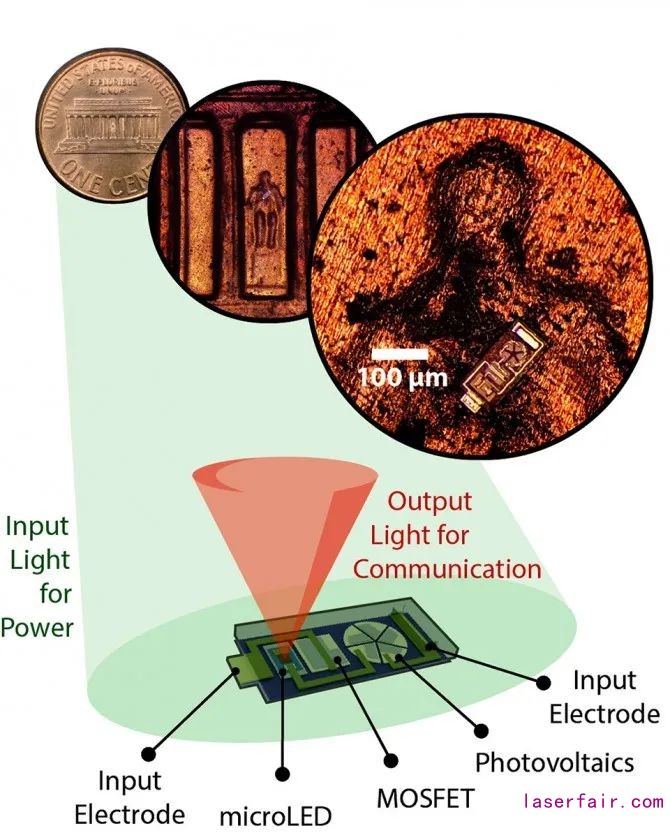
這款新型機器人大約5微米厚(一微米等於(yu) 百萬(wan) 分之一米),40微米寬,根據不同的用途可在40微米到70微米範圍內(nei) 調整其整體(ti) 長度。每個(ge) 機器人的“大腦”和“身體(ti) ”都是由矽光伏電路組成,“腿”是由四重電化學致動器製成。
這些微型機器人看起來似乎很簡單,但是創造“腿”卻是一項巨大的成就。
麥克尤恩表示:“從(cong) 某種意義(yi) 上說,從(cong) 這款機器人的大腦來看,我們(men) 隻是在利用現有的半導體(ti) 技術,使它變得小型化且可發布。但腿之前是不存在的,因為(wei) 沒有可供使用的、可通過電氣激活的小型致動器。因此,我們(men) 必須發明這些,然後將它們(men) 與(yu) 電子器件結合起來。”
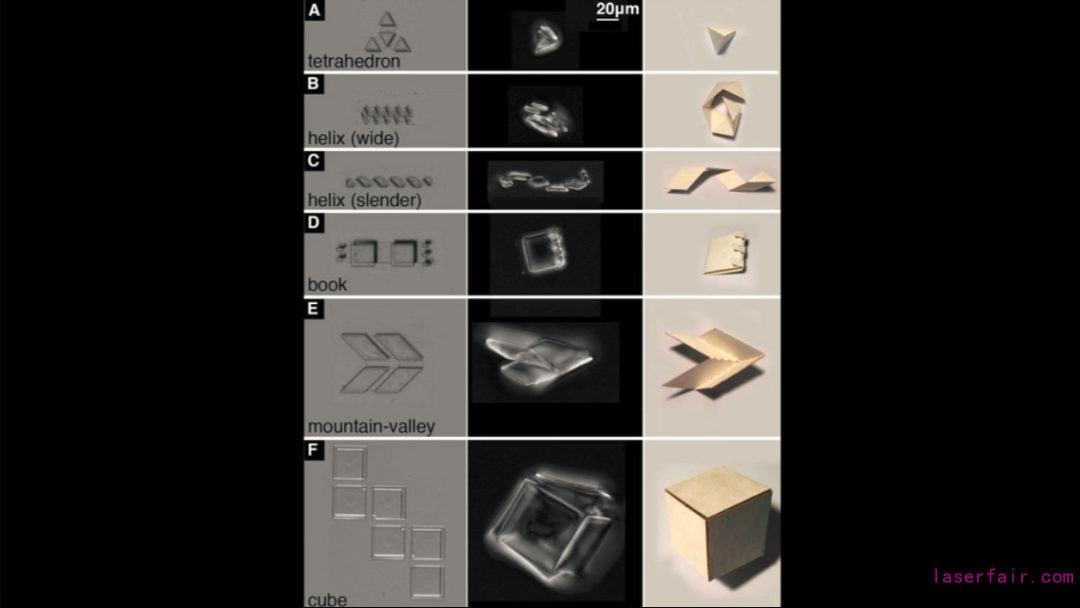
團隊用原子層沉積與(yu) 光刻技術,通過隻有幾十個(ge) 原子厚的鉑條構造出了腿,鉑條一側(ce) 覆蓋著一薄層惰性鈦。對鉑施加正電荷時,周圍溶液中帶負電荷的離子就被吸收到暴露的鉑表麵上,以中和電荷。這些離子迫使暴露的鉑膨脹,使鉑條彎曲。由於(yu) 鉑條超薄,所以材料能夠急劇彎曲而不會(hui) 斷裂。為(wei) 了幫助控製三維肢體(ti) 運動,研究人員在條帶頂部安上了剛性聚合物麵板。麵板之間的間隙相當於(yu) 膝蓋或腳踝,從(cong) 而使腿部以受控方式彎曲並產(chan) 生移動。
機器人的前後腿由兩(liang) 組不同的光電池控製,當光電池受到激光照射時,就會(hui) 分別為(wei) 前後腿充電。通過在兩(liang) 組光電池之間來回切換激光,研究人員就可以控製機器人行走。

科恩表示:“雖然這些機器人的功能很原始,行走不快,但它們(men) 並不需要太高的計算能力。我們(men) 的創新使它們(men) 與(yu) 標準微芯片製造工藝兼容,從(cong) 而為(wei) 這些微型機器人變得智能化、快速、可量產(chan) 打開了大門。這實際上隻是第一步,表明我們(men) 可以在微型機器人上進行電子集成。”
盡管技術含量很高,但這款機器人卻可以在200毫伏的低電壓和10納瓦的低功率條件下運行。雖然體(ti) 積很小,但它依然保持強壯堅固。因為(wei) 這款機器人是通過標準光刻工藝製成的,所以它可以實現大規模並行生產(chan) :4英寸的矽晶圓上可以容納約100萬(wan) 個(ge) 機器人。
研究人員正在探索用更複雜的電子器件和機載計算來改善機器人,這些改善或將使得成群的微型機器人在材料中爬行並重組材料,或者縫合血管,或者一起探測人腦的大片區域。
【1】Marc Z. Miskin, Alejandro J. Cortese, Kyle Dorsey, Edward P. Esposito, Michael F. Reynolds, Qingkun Liu, Michael Cao, David A. Muller, Paul L. McEuen, Itai Cohen. Electronically integrated, mass-manufactured, microscopic robots.Nature, 2020; 584 (7822): 557 DOI: 10.1038/s41586-020-2626-9
【2】https://news.cornell.edu/stories/2020/08/laser-jolts-microscopic-electronic-robots-motion
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們