




測量誤差最常見的來源之一是垂直噪聲的存在,它會(hui) 降低信號測量的精度,在頻率變化時產(chan) 生不精確測量的問題。采用ENOB(有效位數)測試法可以更準確地評估數字轉換係統包括示波器的性能。ENOB值是一個(ge) 係統噪聲和頻率響應的總和。當頻率升高時,通常分辨率會(hui) 大幅下降,因此ENOB-頻率的關(guan) 係是一個(ge) 有用的指標。遺憾的是,ENOB指標通常隻是對一兩(liang) 個(ge) 點,而不是整個(ge) 頻率區間。
在對微伏範圍的信號(如雷達傳(chuan) 輸信號或心率監測儀(yi) 信號)做測試與(yu) 測量時,噪聲會(hui) 給測量帶來困難。噪聲會(hui) 導致難以找到一個(ge) 信號的真實電壓,它會(hui) 增加抖動,使時序測量精度下降。另外,它還使(數字示波器的)波形看上去比模擬示波器“肥胖”。
ENOB概念
數字轉換的性能與(yu) 分辨率相關(guan) 聯,但如果隻是簡單地去選擇一款在所需幅度分辨率時有所需的位數、量化水平的數字轉換器,就有失偏頗,因為(wei) 根據所采用的技術,當信號速度增高時,動態數字轉換的性能會(hui) 顯著下降。一個(ge) 8 位數字轉換器在遠未達到其所設定帶寬時,有效位性能就會(hui) 下降到64 位、4 位,甚至更低。
在設計或選擇ADC、數字轉換儀(yi) 器或測試係統時,關(guan) 鍵是要理解影響數字轉換性能的各種因素,並有一些方法來評估整體(ti) 性能。ENOB測試提供了為(wei) 動態數字轉換性能建立一種品質因數的方法。在各個(ge) 設計階段都可以將其作為(wei) 一種評估工具並用它獲得整體(ti) 係統指標。由於(yu) 製造商一般不會(hui) 為(wei) 每台儀(yi) 器或係統部件設定ENOB,你可能需要做ENOB評估,以作比對。ENOB實際上是確定一個(ge) 數字轉換設備或儀(yi) 器表達各種頻率下信號能力的一種手段(圖1)。
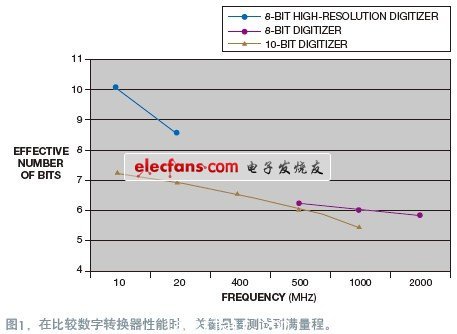
圖1中顯示,當數字信號的頻率增高時,有效的數字轉換精度會(hui) 劣化。此時,8 位數字轉換器隻有在直流和低頻下才能提供8個(ge) 有效精度位。當數字轉換的信號頻率或速度升高時,性能會(hui) 下降到較小的有效位數。
數字轉換性能的這種下降本身就增加了數字轉換信號的噪聲水平。這種情況下,噪聲是指輸入信號與(yu) 數字轉換輸出信號之間的任何隨機誤差或偽(wei) 隨機誤差。可以將一個(ge) 數字轉換信號中的此種噪聲表述為(wei) SNR(信噪比):SNR= rmsSIGNAL/rmsERROR,其中,rmsSIGNAL是數字轉換信號的均方根值,而rmsERROR是噪聲誤差的均方根值。下式可得到它與(yu) 有效位的關(guan) 係:EB=log2(SNR)-½log2(1.5)-log2(A/FS),其中EB表示有效位,A是數字轉換信號的峰峰輸入幅度,而FS是數字轉換器輸入端的峰峰滿量程範圍。其它常用方程包括:EB=N-log2(rmsERROR/ IDEAL_QUANTIZATION_ERROR),其中N是數字轉換器的標稱(或靜態)分辨率,還有:EB=-log2(rmsERROR)×√12/FS。
這些方程采用了數字轉換過程中產(chan) 生的噪聲(或誤差)水平。在上麵第二個(ge) EB方程中,理想的量化誤差項是理想情況下對輸入信號N bit數字轉換時的rms誤差。IEEE針對數字轉換波形記錄儀(yi) 的標準(IEEE標準1057)定義(yi) 了前兩(liang) 個(ge) 方程(參考文獻1)。第三個(ge) 方程有一個(ge) 替代者,它假設理想的量化誤差是均勻分布在一個(ge) LSB(最低有效位)的峰-峰上。有了這個(ge) 假設,就可以用 FS/(2N√12替代理想的量化誤差項,其中FS是數字轉換器的滿量程輸入範圍。
這些方程均使用滿量程信號。實際測試中采用的信號可能不到滿量程,例如50%或90%量程。改善ENOB結果可以提高此值,因此,ENOB規格或測試的比較必須同時考慮測試信號的幅度與(yu) 頻率。
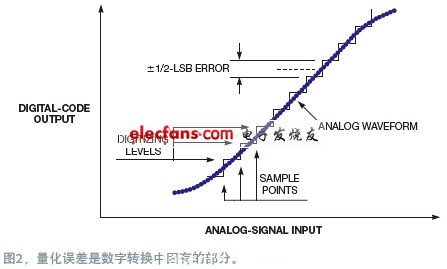
與(yu) 數字轉換有關(guan) 的噪聲或誤差可以有多個(ge) 來源。即使是一個(ge) 理想的數字轉換器,量化也會(hui) 產(chan) 生一個(ge) 最小噪聲,或相當於(yu) ±½ LSB的誤差水平。這個(ge) 誤差是數字轉換過程的固有部分(圖2)。這是與(yu) 理想數字轉換相關(guan) 的分辨率限製,或不確定性。一款真實的數字轉換器會(hui) 在這個(ge) 理想的基本誤差水平上增加更多的誤差。這些額外的實際誤差可以包括:直流偏移;交流偏移,或“模式”誤差,有時也叫做固定模式失真,它與(yu) 交互式采樣方式有關(guan) ;直流與(yu) 交流增益誤差;模擬非線性;還有數字非單調性。另外還必須考慮相位誤差;隨機噪聲;頻率-時基不精確性;孔徑不確定性,或叫采樣時間抖動;數字誤差,如由於(yu) 亞(ya) 穩態、丟(diu) 失碼等所導致的數據損失;以及其它誤差源,如觸發器抖動。
ENOB的測量
除這些誤差源以外,還存在著其它可能的數字轉換誤差源。例如,在沒有采樣保持或跟蹤保持的高速實時數字轉換中,LSB必須高速變化,以跟上一個(ge) 快速變化的信號。這種要求增加了對數據線的帶寬要求,以及對這些次要位的緩衝(chong) 輸入。如果不滿足對帶寬的要求,則可能丟(diu) 掉這些快速變化的次要位,從(cong) 而降低ENOB。
一般情況下,測量整體(ti) 性能較簡單,而要試圖區別和測量一個(ge) 數字轉換係統的每個(ge) 誤差源,則比較難。一個(ge) 好的起點是確定數字轉換係統的SNR,並根據上述方程獲得有效位。這種方法提供了一種易於(yu) 理解並通用的品質因數,可供比較。
基本的測試步驟包括為(wei) 數字轉換器施加一個(ge) 已知的高質量信號,然後分析數字轉換後的波形(圖3)。測試用一個(ge) 正弦波作為(wei) 測試信號,因為(wei) 高質量正弦波的生成和特性確定都相對較容易。一般的測試要求是:正弦波發生器的性能必須明顯超過待測數字轉換器。否則,測試將無法從(cong) 信號源誤差中分辨出數字轉換誤差。可能需要在源上增加濾波器,使源的諧波明顯低於(yu) 對於(yu) 待測數字轉換器的預期值。
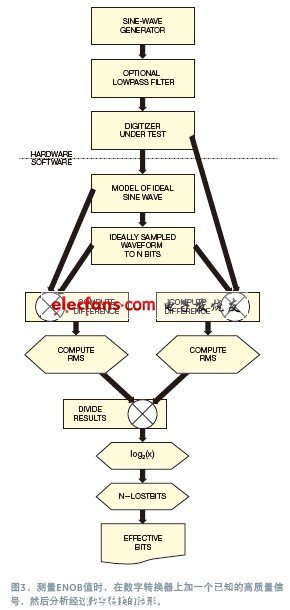
要獲得ENOB,必須計算一個(ge) 完美的(或理想的)正弦波,並將其加到自己的示波器上,使其適配於(yu) 數字轉換的正弦波。這種方法模擬了一個(ge) 理想的N bit待測數字轉換器可產(chan) 生的內(nei) 容。然後,可以計算出理想正弦波與(yu) 經過完美采樣和數字轉換的波形之間的差值。這個(ge) 差的rms值就是理想量化誤差。在ENOB方程中,從(cong) 實際數字轉換正弦波中減去理想正弦波,找到結果的rms值,就得到了rms誤差值。另外,可以找出信號的rms值和rms誤差,用它們(men) 計算出SNR。最後的計算就得到了數字轉換器的一個(ge) ENOB。對各種頻率都保持輸入信號幅度為(wei) 常數,就可以進一步計算出目標數字轉換器或數字轉換係統的各個(ge) ENOB。然後繪出不同頻率下的這些數值圖,獲得一個(ge) 數字轉換器的性能曲線。
ENOB測量得到了包含數字轉換係統關(guan) 鍵誤差的品質因素,易於(yu) 理解和用於(yu) 比較。ENOB取決(jue) 於(yu) 輸入信號的滿量程數字轉換幅度的百分比。測試一款小於(yu) 滿量程幅度的數字轉換器一般獲得的ENOB數值要優(you) 於(yu) 滿量程測試值。無論采用的是何種測試方案(滿量程或部分量程),輸入測試信號的幅度規格都應伴隨著結果。
示波器噪聲
當對數字示波器與(yu) 模擬示波器作比較時,有一個(ge) 常見的誤區,那就是數字示波器的垂直噪聲水平較高。采用數字示波器時,顯示的軌跡可能要比模擬示波器更粗。然而,數字示波器的噪聲水平並不比相當的模擬示波器更高;它隻是表現為(wei) 這種方式。#p#分頁標題#e#
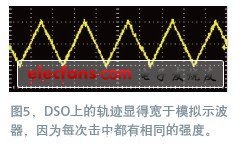
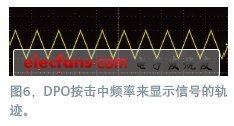
采用CRT顯示屏的模擬示波器並不會(hui) 顯示噪聲的極值範圍,因為(wei) 它們(men) 出現得很快,很少見(圖4),這意味著磷光也一閃而過,因此這些極值範圍很暗,或根本無法在屏幕上顯示。模擬儀(yi) 器不會(hui) 顯示各個(ge) 時間上的電壓,但有一個(ge) 第三尺度:亮度。亮度與(yu) 信號發生的頻率有關(guan) 。一個(ge) DSO(數字信號示波器)會(hui) 以相同亮度,顯示每個(ge) bit,無論像素被擊中的頻率如何(圖5)。DPO(數字熒光示波器)提供了一種存儲(chu) 第三尺度的方式,即根據擊中的頻率對信號劃分等級(圖6)。
真實世界的信號噪聲
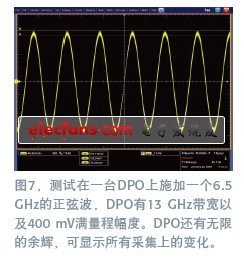
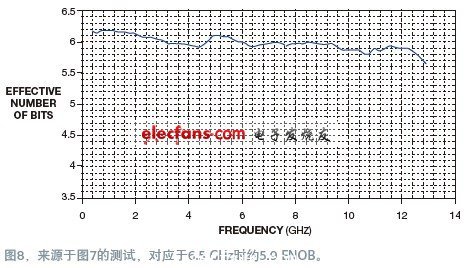
ENOB性能表明,噪聲會(hui) 同時影響到幅度和時序測量。為(wei) 了演示噪聲對幅度的影響,在一台13 GHz帶寬,400 mV滿量程電壓的Tektronix DPO/DSA70000B示波器上加了一個(ge) 6.5 GHz的正弦波。它還有無限大的顯示餘(yu) 輝,這樣可以看到所有采集的變動。在不作平均時,測試運行包含了大約1萬(wan) 次采集。結果在峰值時軌跡粗細約為(wei) 15.9 mV,相當於(yu) 該示波器滿量程的3%(圖7)。這個(ge) 結果對應於(yu) 6.5 GHz時約5.9 ENOB(圖8)。采用相同測試設置時,比較性測試表明其它示波器的峰值時軌跡粗在35 mV以上,ENOB約4.5。
ENOB效果也可以在眼圖上看。ENOB性能同時影響到眼圖的幅度和抖動。5 Gbps的眼圖表示了一個(ge) 與(yu) PCIe(外設部件快速互連)2代或USB(通用串行總線)3.0相關(guan) 的信號碼率(圖9)。
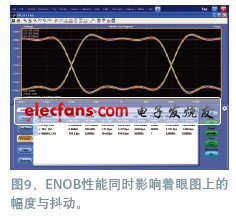
測試時,將此信號加在Tektronix DPO70000B示波器上,儀(yi) 器設定為(wei) 測量TIE(時間間隔誤差)抖動,它同時影響著抖動與(yu) 幅度噪聲。本測試獲得的抖動為(wei) 3.08 ps峰峰值。在比較測試中,有些示波器對相同信號的抖動超過11 ps峰峰值。
同樣,噪聲也影響著眼圖的幅度。此時,在眼的50%點處測量眼的高度,得到約582 mV的幅度。與(yu) 之相比,其它儀(yi) 器測得的不到525 mV。
所有數字轉換係統都有隨速度提升而劣化的噪聲。因此,擁有一種評估數字轉換係統(包括測試儀(yi) 器)實際噪聲性能的方法就很有用。 ENOB是一種針對任何模擬或數字係統中信號完整性的常用品質因數,代表了一個(ge) 頻率範圍上累積的誤差。通常,ENOB值會(hui) 隨頻率的升高而減小。
當對實際信號做幅度測量時,很容易看到由於(yu) 較低ENOB性能所致的誤差,增加了噪聲,做抖動測量時也獲得更高的抖動。隨著ENOB數值的下降,儀(yi) 器的測量精度也下降,這直接等同於(yu) 可在儀(yi) 器上測試的餘(yu) 量。記住這些因素後,應仔細評估ENOB性能,尤其是對那些高碼率和快速邊沿的應用。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們