




激光測距是光波測距中的一種測距方式,如果光以速度c在空氣中傳(chuan) 播在A、B兩(liang) 點間往返一次所需時間為(wei) t,則A、B兩(liang) 點間距離D可用下列表示。
D=ct/2 式中:
D——測站點A、B兩(liang) 點間距離;
c——光在大氣中傳(chuan) 播的速度;
t——光往返A、B一次所需的時間。
由上式可知,要測量A、B距離實際上是要測量光傳(chuan) 播的時間t,根據測量時間方法的不同,激光測距儀(yi) 通常可分為(wei) 脈衝(chong) 式和相位式兩(liang) 種測量形式。
相位式激光測距儀(yi)
相位式激光測距儀(yi) 是用無線電波段的頻率,對激光束進行幅度調製並測定調製光往返測線一次所產(chan) 生的相位延遲,再根據調製光的波長,換算此相位延遲所代表的距離。即用間接方法測定出光經往返測線所需的時間,如下圖所示。
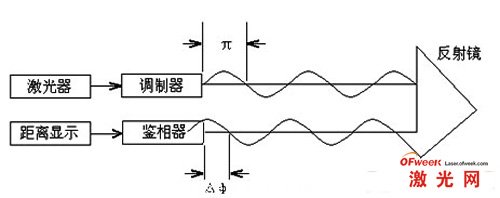
圖為(wei) 相位式激光測距儀(yi) 測距原理圖
相位式激光測距儀(yi) 一般應用在精密測距中。由於(yu) 其精度高,一般為(wei) 毫米級,為(wei) 了有效的反射信號,並使測定的目標限製在與(yu) 儀(yi) 器精度相稱的某一特定點上,對這種測距儀(yi) 都配置了被稱為(wei) 合作目標的反射鏡。
若調製光角頻率為(wei) ω,在待測量距離D上往返一次產(chan) 生的相位延遲為(wei) φ,則對應時間t 可表示為(wei) :
t=φ/ω 將此關(guan) 係代入上式距離D可表示為(wei) :
D=1/2 ct=1/2 c·φ/ω=c/(4πf) (Nπ+Δφ)=c/4f (N+ΔN)=U(N+) 式中:
φ——信號往返測線一次產(chan) 生的總的相位延遲。
ω——調製信號的角頻率,ω=2πf。
U——單位長度,數值等於(yu) 1/4調製波長
N——測線所包含調製半波長個(ge) 數。
Δφ——信號往返測線一次產(chan) 生相位延遲不足π部分。
ΔN——測線所包含調製波不足半波長的小數部分。
ΔN=φ/ω
在給定調製和標準大氣條件下,頻率c/(4πf)是一個(ge) 常數,此時距離的測量變成了測線所包含半波長個(ge) 數的測量和不足半波長的小數部分的測量即測N或φ,由於(yu) 近代精密機械加工技術和無線電測相技術的發展,已使φ的測量達到很高的精度。
為(wei) 了測得不足π的相角φ,可以通過不同的方法來進行測量,通常應用最多的是延遲測相和數字測相,目前短程激光測距儀(yi) 均采用數字測相原理來求得φ。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們