




什麽(me) 是加速度傳(chuan) 感器?
加速度傳(chuan) 感器是一種能夠測量加速力的電子設備。加速力就是當物體(ti) 在加速過程中作用在物體(ti) 上的力,就好比地球引力,也就是重力。加速力可以是個(ge) 常量,比如g,也可以是變量。
 |
圖1:ADXL 加速度傳(chuan) 感器
加速度傳(chuan) 感器一般用在哪裏?
通過測量由於(yu) 重力引起的加速度,你可以計算出設備相對於(yu) 水平麵的傾(qing) 斜角度。通過分析動態加速度,你可以分析出設備移動的方式。但是剛開始的時候,你會(hui) 發現光測量傾(qing) 角和加速度好像不是很有用。但是,現在工程師們(men) 已經想出了很多方法獲得更多的有用的信息。
加速度傳(chuan) 感器可以幫助你的機器人了解它現在身處的環境。是在爬山?還是在走下坡,摔倒了沒有?或者對於(yu) 飛行類的機器人來說,對於(yu) 控製姿態也是至關(guan) 重要的。更要確保的是,你的機器人沒有帶著炸彈自己前往人群密集處。一個(ge) 好的程序員能夠使用加速度傳(chuan) 感器來回答所有上述問題。加速度傳(chuan) 感器甚至可以用來分析發動機的振動。
目前最新IBM Thinkpad手提電腦裏就內(nei) 置了加速度傳(chuan) 感器,能夠動態的監測出筆記本在使用中的振動,並根據這些振動數據,係統會(hui) 智能的選擇關(guan) 閉硬盤還是讓其繼續運行,這樣可以最大程度的保護由於(yu) 振動,比如顛簸的工作環境,或者不小心摔了電腦做造成的硬盤損害,最大程度的保護裏麵的數據。另外一個(ge) 用處就是目前用的數碼相機和攝像機裏,也有加速度傳(chuan) 感器,用來檢測拍攝時候的手部的振動,並根據這些振動,自動調節相機的聚焦。
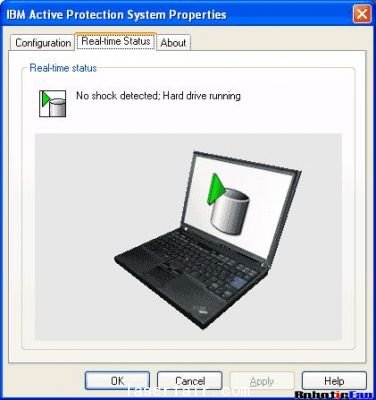 |
圖2:IBM Thinkpad 內(nei) 置的 Active protection 係統界麵
加速度傳(chuan) 感器是如何工作的?
多數加速度傳(chuan) 感器是根據壓電效應的原理來工作的。
所謂的壓電效應就是"對於(yu) 不存在對稱中心的異極晶體(ti) 加在晶體(ti) 上的外力除了使晶體(ti) 發生形變以外,還將改變晶體(ti) 的極化狀態,在晶體(ti) 內(nei) 部建立電場,這種由於(yu) 機械力作用使介質發生極化的現象稱為(wei) 正壓電效應"。
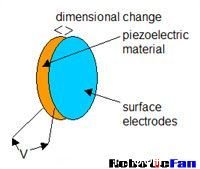 |
圖3:壓電效應
一般加速度傳(chuan) 感器就是利用了其內(nei) 部的由於(yu) 加速度造成的晶體(ti) 變形這個(ge) 特性。由於(yu) 這個(ge) 變形會(hui) 產(chan) 生電壓,隻要計算出產(chan) 生電壓和所施加的加速度之間的關(guan) 係,就可以將加速度轉化成電壓輸出。當然,還有很多其它方法來製作加速度傳(chuan) 感器,比如電容效應,熱氣泡效應,光效應,但是其最基本的原理都是由於(yu) 加速度產(chan) 生某個(ge) 介質產(chan) 生變形,通過測量其變形量並用相關(guan) 電路轉化成電壓輸出。
在選購加速度傳(chuan) 感器的時候,需要考慮什麽(me) ?
模擬輸出 vs 數字輸出:
這個(ge) 是最先需要考慮的。這個(ge) 取決(jue) 於(yu) 你係統中和加速度傳(chuan) 感器之間的接口。一般模擬輸出的電壓和加速度是成比例的,比如2.5V對應0g的加速度,2.6V對應於(yu) 0.5g的加速度。數字輸出一般使用脈寬調製(PWM)信號。
如果你使用的微控製器隻有數字輸入,比如BASIC Stamp,那你就隻能選擇數字輸出的加速度傳(chuan) 感器了,但是問題是你必須占用額外的一個(ge) 時鍾單元用來處理PWM信號,同時對處理器也是一個(ge) 不小的負擔。
如果你使用的微控製器有模擬輸入口,比如PIC/AVR/OOPIC,你可以非常簡單的使用模擬接口的加速度傳(chuan) 感器,所需要的就是在程序裏加入一句類似"acceleration=read_adc()"的指令,而且處理此指令的速度隻要幾微秒。
測量軸數量:
對於(yu) 多數項目來說,兩(liang) 軸的加速度傳(chuan) 感器已經能滿足多數應用了。對於(yu) 某些特殊的應用,比如UAV,ROV控製,三軸的加速度傳(chuan) 感器可能會(hui) 適合一點。
最大測量值:
如果你隻要測量機器人相對於(yu) 地麵的傾(qing) 角,那一個(ge) ±1.5g加速度傳(chuan) 感器就足夠了。但是如果你需要測量機器人的動態性能,±2g也應該足夠了。要是你的機器人會(hui) 有比如突然啟動或者停止的情況出現,那你需要一個(ge) ±5g的傳(chuan) 感器。
靈敏度:
一般來說,越靈敏越好。越靈敏的傳(chuan) 感器對一定範圍內(nei) 的加速度變化更敏感,輸出電壓的變化也越大,這樣就比較容易測量,從(cong) 而獲得更精確的測量值。
帶寬:
這裏的帶寬實際上指的是刷新率。也就是說每秒鍾,傳(chuan) 感器會(hui) 產(chan) 生多少次讀數。對於(yu) 一般隻要測量傾(qing) 角的應用,50HZ的帶寬應該足夠了,但是對於(yu) 需要進行動態性能,比如振動,你會(hui) 需要一個(ge) 具有上百HZ帶寬的傳(chuan) 感器。
電阻/緩存機製:
對於(yu) 有些微控製器來說,要進行A/D轉化,其連接的傳(chuan) 感器阻值必須小於(yu) 10kΩ。比如Analog Devices's analog加速度傳(chuan) 感器的阻值為(wei) 32kΩ,在PIC和AVR控製板上無法正常工作,所以建議在購買(mai) 傳(chuan) 感器前,仔細閱讀控製器手冊(ce) ,確保傳(chuan) 感器能夠正常工作。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀




























 關注我們
關注我們