




摘 要:本文采用LabVIEW機器視覺平台開發設計基於(yu) USB攝像頭的微小位移測量係統。使用LabVIEW軟件平台編程控製USB攝像頭,采集顯微鏡中放大物體(ti) 前後移動的圖像,通過計算物體(ti) 圖像移動像素點數來測量物體(ti) 移動的微小位移。本測量係統攝像幀速為(wei) 30幀/秒,可以實現微小位移的動態測量。
關(guan) 鍵詞:微小位移;LabVIEW;USB攝像頭;讀數顯微鏡
Abstract: With the Labview Vision, the reading microscope and USB camera, a proto-type instrument system measuring the weenie displacement is demonstrated.. The program can be used to control the USB camera and acquire the image enlarged by the reading microscope. As the shooting speed is 30 frame/s, the dynamic measure can be implemented.
Key words: weenie displacement,LabVIEW,USB camera, eading microscope
前言
測量物體(ti) 的微小位移在許多方麵如數控機床的精確加工等,有廣泛的應用。目前測量物體(ti) 的微小位移已經發展了多種方法:激光位移傳(chuan) 感器測量法、電容位移傳(chuan) 感器測量法等。本文實現了一種基於(yu) LabVIEW機器視覺軟件平台和讀數顯微鏡以及USB攝像頭測量微小位移的係統。該係統成本低,操作方便,並實現了計算機的實時動態測量。由美國NI公司推出的LabVIEW是目前最流行、應用最廣、發展最快和功能最強的圖形化數據軟件[1-4]。NI公司推出的機器視覺平台是專(zhuan) 門的圖像處理軟件平台。本測量係統采用LabVIEW和機器視覺軟件平台編程控製USB攝像頭采集讀數顯微鏡的物體(ti) 圖像移動,通過計算機判斷物體(ti) 圖像的像素移動來計算物體(ti) 移動的微小位移。整個(ge) 實驗過程中,圖像采集和數據處理都是通過LabVIEW軟件編程實現。由於(yu) 攝像頭的幀速為(wei) 30幀/秒,因此可實現動態測量、&pide;像o實時顯示結果並將數據實時保存。
1 實驗原理和思路
通過讀數顯微鏡的放大作用把物體(ti) 發生的微小位移放大,利用攝像頭拍攝物體(ti) 放大的圖像,用計算機對圖像進行二值化處理,通過移動前後圖像質心位置像素點的變化可計算出物體(ti) 位移的變化。圖1是實驗原理和測量流程圖。
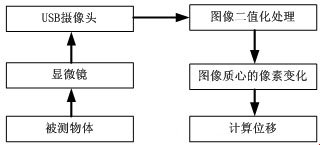
圖1 微小位移測量實驗原理圖
實驗思路如下:讀數顯微鏡底座的LED發射出均勻穩定的光,照射到顯微鏡載物台的玻璃片上。物體(ti) 的移動牽引顯微鏡物鏡下的細絲(si) 產(chan) 生微小位移,這裏,細絲(si) 的位移就是物體(ti) 的位移。顯微鏡對細絲(si) 成一個(ge) 清晰放大的像,被置於(yu) 目鏡上的USB攝像頭采集到圖像並將圖像傳(chuan) 到計算機進行處理。計算機對采集到的圖像先進行二值化處理,濾去背景圖像的影響,計算出圖像質心的位置。通過比較前後圖像質心的位置坐標,可計算出質心移動的像素點。實驗中通過多次測量,先得出圖像單位像素點和物體(ti) 實際位移的比例係數。實際測量物體(ti) 的位移時,通過計算出圖像質心像素點的變化,再乘以單位像素點的變化與(yu) 物體(ti) 實際位移的比例係數,計算出物體(ti) 的實際位移。
實驗中使用的實驗儀(yi) 器和裝置包括:讀數顯微鏡(型號為(wei) :JCD-Ⅲ,上海光學儀(yi) 器廠)。實驗中顯微鏡的目鏡×10,物鏡×10,對細絲(si) 的放大倍數為(wei) 100倍。攝像頭:普通羅技快看高手版(羅技公司),攝像頭的分辯率 320×240,30萬(wan) 像素,拍攝幀速為(wei) 30幀/秒。細絲(si) 為(wei) 精確加工的黑色細絲(si) ,直徑約為(wei) 。
2 基於(yu) LabVIEW和視覺開發平台測量係統的程序設計
2.1 程序設計的思路
實驗通過采用LabVIEW視覺軟件平台編程控製USB攝像頭采集顯微鏡中放大的物體(ti) 圖像。通過對圖像進行計算和處理,計算出移動物體(ti) 圖像的質心像素的位置變化來測量物體(ti) 的微小位移。在LabVIEW的機器編程中,采用編程控製USB攝像頭的采集。為(wei) 了濾去背景圖像和噪音的影響,采集到的圖像需經過二值化處理。通過設定門限值,將圖像像素值高於(yu) 門限值的設為(wei) 最高像素值,低於(yu) 門限值的置零,獲得細絲(si) 的二值化圖像。調用視覺開發平台中的專(zhuan) 門模塊計算出細絲(si) 圖像質心的像素位置[5-6],進一步計算出移動前後質心像素位置變化的像素點個(ge) 數。測量時,通過計算出圖像質心移動的像素點個(ge) 數乘以單位像素點的變化與(yu) 實際距離的比例係數,求得物體(ti) 移動的實際距離。
2.2 測量程序顯示界麵的設計
USB 攝像頭將被測物體(ti) 所成像變為(wei) 數字圖像輸入計算機,由LabVIEW軟件平台調用並顯示。考慮到顯示的方便,測量程序設為(wei) 兩(liang) 個(ge) 界麵顯示。圖2是測量程序的實時同步測量界麵。“圖像跟蹤”實時顯示攝像頭拍攝到的顯微鏡成的細絲(si) 圖像,直觀顯示圖像移動,圖中黑色物體(ti) 為(wei) 細絲(si) 的圖像;“結果”和“位移記錄”實時顯示物體(ti) 位移變化;點擊“開始測量”鍵,計算機啟動攝像頭開始測量;點擊“複位”鍵重新測量。考慮到攝像頭開始工作時一般都不穩定,設置計算機啟動攝像頭開始測量後采集到的前15幀圖像不予采用。為(wei) 了方便顯示,設置圖像采集在藍色進度條走完之後開始測量。通過這個(ge) 界麵,能夠直觀觀測到物體(ti) 的圖像和位移。
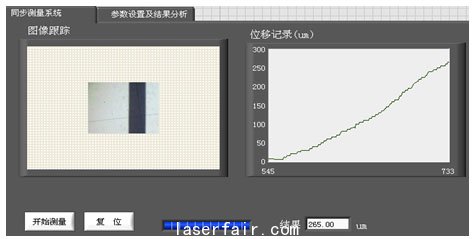
圖2 同步測量顯示界麵
2.3 測量的LabVIEW程序設計
在LabVIEW 中,由於(yu) 將調用函數模塊化了,因此調用USB攝像頭非常簡單。圖3是LabVIEW調用USB攝像頭采集圖像的編程。調用的過程如下:調用攝像頭①IMAQ Create.vi —> ②IMAQ USB Grab Setup.vi —> ③IMAQ USB Grab Acquire.vi —>④IMAQ USB Close.vi,該過程為(wei) 靜態拍攝一幀。加上一個(ge) 循環⑥While Loop,通過⑤Wait Until Next ms Multiple控製While Loop每隔多少毫秒觸發一次(默認值為(wei) 33.3毫秒,也就是每秒三十30幀),輸出⑦Image Display。
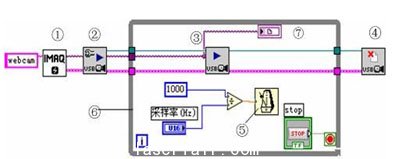
圖3 調用USB攝像頭采集圖像
從(cong) USB攝像頭采集到的圖像經過圖4進行二值化的編程處理:從(cong) ①IMAQ USB Grab Acquire.vi輸出的圖像②IMAQ ColorImageToArray,由③Optional Rectangle功能截取采集圖像的有效部分並轉化為(wei) 一個(ge) 32位的二維數組。為(wei) 了便於(yu) 確定二值化門限的標度,使用To Unsigned Byte Integer 把32位數組轉化為(wei) 8位數組,通過兩(liang) 次使用④For Loop的循環端口i和⑤⑥Index Array對二維數組進行索引;使用Less Or Equal?和⑦Select對數組的每一個(ge) 值與(yu) 預先的門限值進行比較判斷,規定大於(yu) 預先給定門限值為(wei) 0(亮度最小),否則為(wei) 255(亮度最大)。經過二值化處理後的數組通過IMAQ ArrayToImage轉化為(wei) 圖像顯示出來,這樣就把采集到的圖像變為(wei) 隻有黑白兩(liang) 種顏色。其中,白色代表物體(ti) 所成的像,黑色為(wei) 背景圖像。
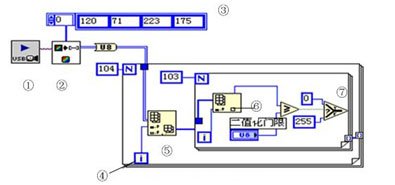
圖4 二值化處理圖像
NI公司的機器視覺軟件平台是專(zhuan) 門為(wei) 圖像處理開發的,有很多專(zhuan) 用的軟件模塊。我們(men) 選用了其中計算質心的模塊。將圖像輸入模塊,它便能輸出圖像質心的坐標。按照實驗設計思路,我們(men) 必須預先測量出圖像單位像素點的變化和實際物體(ti) 移動距離的比例係數,因此選用了讀數顯微鏡。讀數顯微鏡能夠精確移動顯微鏡。物體(ti) 不動,精確移動顯微鏡,可讀出顯微鏡的移動距離,同時計算出圖像變化的像素點數。將移動距離除以總的像素點數,得到單位像素點的變化與(yu) 實際物體(ti) 移動距離的比例係數。#p#分頁標題#e#
實驗中物體(ti) 的移動是通過牽引顯微鏡物鏡下的細絲(si) 而產(chan) 生的,因此細絲(si) 位移就是物體(ti) 的位移。為(wei) 了獲得100um的位移,我們(men) 將物體(ti) 放在一個(ge) 螺旋測微器控製的光學平台上。螺旋測微器總共50個(ge) 小格,轉動一周移動為(wei) 0.5mm,因此轉動一小格為(wei) 10um。通過調節螺旋測微器,我們(men) 獲得100um的位移範圍。測量時,將采集到的數據實時保存到電腦中,再通過畫圖軟件顯示。圖5是測量的實驗結果。圖中的橫坐標表示測量的時間,縱坐標表示測量的位移,平直部分是移動螺旋測微器時的停留時間。由於(yu) 是手旋動螺旋測微器,因此移動的快慢不一致導致出現階梯狀的停頓。
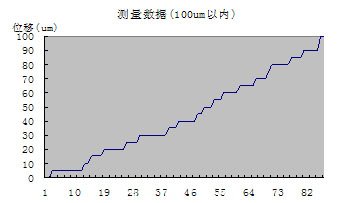
圖5實驗結果顯示,物體(ti) 移動範圍為(wei)
3 實驗誤差分析和改進方法討論
測量係統中誤差主要來自兩(liang) 個(ge) 方麵:一個(ge) 是測量係統本身帶來的誤差,例如物體(ti) 牽引細絲(si) 的運動不同步、實驗平台的震動等;另一個(ge) 重要的誤差來源於(yu) 圖像單位像素點的變化和實際物體(ti) 移動距離的比例係數,如果這個(ge) 係數有較大的誤差,測量結果就不可靠。實驗中采用的方法是:細絲(si) 不動,精確移動顯微鏡,讀出顯微鏡的移動距離;計算出細絲(si) 圖像變化的像素點數,將移動距離除以總的像素點數,得到單位像素點的變化與(yu) 實際物體(ti) 移動距離的比例係數。我們(men) 將讀數顯微鏡精確移動100um、150um、200um ,反複多次測量細絲(si) 質心像素點的變化點數,同時考慮回程誤差,計算出該係數平均值約為(wei) 2um/像素。因此,測量係統的測量精度是2um。選用更高倍數的顯微鏡,能夠獲得更高的測量精度。
4 總結
本文詳細介紹了基於(yu) LabVIEW軟件和機器視覺平台,利用USB攝像頭和讀數顯微鏡建立一個(ge) 動態測量微小位移的係統。實驗過程中的圖像采集和數據處理都是通過LabVIEW軟件編程實現。通過利用周邊通用設備(計算機、讀數顯微鏡、USB攝像頭),使得該係統具有精度較高、製造簡單、技術要求低、操作方便和移植性強等特點。
本文創新點:將虛擬儀(yi) 器技術應用到微小位移測量中,使用LabVIEW機器視覺平台開發設計了基於(yu) USB攝像頭的微小位移動態測量係統。我們(men) 的實驗中,動態測量精度達到了2um。
參考文獻
[1]龍帆,錢利民,李迎春.基於(yu) LabVIEW和聲卡的揚聲器檢測係統的設計和實現[J].微計算機信息,2006,7-1: 90-92.
[2]National Instruments Corporation. LabVIEWTM User Manual, National Instruments Corporation, 1998.
[3]賈雲(yun) 得. 機器視覺[M]. 科學出版社. 2000.
[4] National Instruments Corporation. IMAQ Vision Concept Manual, 2000.
[5]章毓晉. 圖像工程(上冊(ce) )圖像理解與(yu) 計算機視覺[M]. 清華大學出版社. 2000.
[6]章毓晉. 圖像工程(下冊(ce) )圖像處理和分析[M]. 清華大學出版社. 2000
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們