




引言
目前國內(nei) 使用的數控係統通常是在通用計算機或工控機的基礎上加裝運動控製卡,使用Windows操作係統,並安裝昂貴的數控軟件構成的。這樣的係統軟件成本高、硬件資源浪費、功耗大。而嵌入式產(chan) 品具有係統結構精簡、功耗低等特點,能彌補傳(chuan) 統數控係統的不足。免費軟件Linux 操作係統進軍(jun) 嵌入式領域,更使得嵌入式產(chan) 品能夠充分發揮廉價(jia) 、高性價(jia) 比的優(you) 勢。
本文所述的正是以Linux操作係統為(wei) 軟件平台,以ARM9微處理器為(wei) 硬件平台,以數控銑床為(wei) 背景,自主研發數控硬件及軟件的嵌入式數控銑床控製係統。
1 係統硬件組成
係統的硬件由ARM係統主板和擴展板卡組成。
硬件結構如圖1。
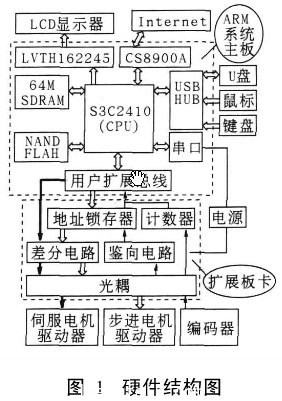
1.1 ARM係統主板
根據係統需要,主板上主要包括中央處理器S3C2410X、SDRAM 內(nei) 存、NAND FLASH ( 64M )、串口、CS8900A以太網芯片( 10M 網口)、LCD顯示器接口、USB接口、擴展總線接口等。
中央處理器S3C2410X內(nei) 部資源十分豐(feng) 富,包括1個(ge) LCD控製器、SDRAM 控製器、3個(ge) 通道的UART、4個(ge) 具有PWM 功能的計時器和1個(ge) 內(nei) 部時鍾、2個(ge) USB主機接口和1個(ge) USB設備接口等。S3C2410X 處理器主頻最高為(wei) 202MH z, 內(nei) 置16 KB 指令高速緩存和16KB數據高速緩存,5級指令流水線,帶有乘累加運單元,可以運行起嵌入式Linux 操作係統並能進行較為(wei) 複雜的信息處理,基本滿足用戶對快速性的要求。並且采用NAND FLASH 與(yu) SDRAM 組合來存儲(chu) 數據和程序,可以獲得非常高的性價(jia) 比。
係統采用10M 的以太網接口芯片CS8900A, 這是用於(yu) 嵌入式設備的低成本以太局域網控製器。通過標準網絡接口數控係統可以連接到Internet或局域網上。
1.2 擴展板卡
擴展板卡即把步進電機驅動器控製接口、伺服電機驅動器控製接口、編碼器接口集成在一個(ge) 板子上,作為(wei) 控製數控銑床的控製卡,來控製步進電機和伺服電機的運轉。
機床目前設計為(wei) 3軸聯動,為(wei) 未來能擴展為(wei) 5軸,設計留有5組接線端子。每組需要兩(liang) 個(ge) 接線端子與(yu) 驅動器相連(采用單脈衝(chong) 方式),其中一個(ge) 端子通過導線連接步進電機驅動器的CP, 提供給步進電機脈衝(chong) 信號,控製它轉動,另一個(ge) 接驅動器的CW, 控製電機的轉動方向,使電機可以完成正轉、反轉和停止動作。對電機的速度控製是通過軟件控製脈衝(chong) 的輸出頻率實現的。經比較決(jue) 定選擇三相混合式步進電機驅動器BD3SFB。因BD3SFB驅動器可兼容兩(liang) 相、四相和五相的工作方式,且有更高的定位精度,可控製電機在任意細分步數情況下,如6000步/轉時精確定位。 電機和驅動器間僅(jin) 用3根線連接,與(yu) 交流異步電機一樣,減少連線出錯的可能性。
伺服電機的控製與(yu) 反饋由驅動器完成,數控係統隻需將指令信號發送至驅動器中。由處理器的通用I/O口產(chan) 生伺服電機的脈衝(chong) 信號和方向信號。伺服驅動器一般需要差分信號作為(wei) 輸入,故采用26LS31芯片作為(wei) 其輸出驅動電路,經過光耦的隔離直接連接到伺服電機驅動器上。
對步進電機采用開環控製,但為(wei) 了將銑刀具體(ti) 位置呈現給用戶,同時修正控製及運動部分不可預見的誤差,可以在步進電機上安裝編碼器。通過聯軸器將二者相連。編碼器脈衝(chong) 信號經8253計數後可得到被測量的數字信號,然後經地址鎖存器連接到擴展總線,由處理器進行處理。8253複用8 位數據總線表示計數值,處理器先讀低8位後讀高8位,計數範圍是0 ~65 535。同時,鑒向器占用數據總線3 位表示各電機旋轉方向。在單脈衝(chong) 模式下,編碼器脈衝(chong) 由D觸發器CD4013鑒相,處理器通過判斷高低電平得知電機旋轉方向。為(wei) 了抗幹擾和實現電氣隔離,在與(yu) 步進電機驅動器的脈衝(chong) 信號和方向信號的端口連接時采用了光電隔離器件。D觸發器鑒相如圖2。

轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀




























 關注我們
關注我們