




激光三角漫反射位移傳(chuan) 感器用於(yu) 測厚有明顯優(you) 點:
-非常小的測量光斑,是點光麵積,如真尚有公司ZLDS10X係列光斑麵積約1mm,它比麵積型非接觸電容、電渦流傳(chuan) 感器,對被測體(ti) 麵積幾乎無要求,適合測量非常小麵積尺寸厚度;
-較遠的測量範圍起始間距。它比非接觸電容、電渦流傳(chuan) 感器起始間距大很多,如真尚有公司ZLDS100激光位移傳(chuan) 感器測量量程100mm,測量間距可以達到1000mm.這樣傳(chuan) 感器可以遠離被測體(ti) ,免受碰壞,及被測體(ti) 熱輻射影響;
-有很大的測量範圍,如真尚有公司ZLDS101激光位移傳(chuan) 感器量程達2000mm,這是其它傳(chuan) 感器很難做到的;
-與(yu) 被測體(ti) 材料無關(guan) ,即金屬非金屬體(ti) ,非透明有漫反射條件表麵都能測。
和其它傳(chuan) 感器測厚一樣,要實現精密測厚需要注意以下條件,否則再好的傳(chuan) 感器也測不準:
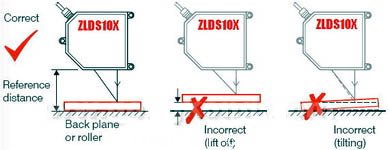
1、用單激光位移傳(chuan) 感器測厚
被測體(ti) 放在測量平台上,測量出傳(chuan) 感器到平台表麵距離,然後再測出傳(chuan) 感器到被測體(ti) 表麵間距,經計算後測出厚度。要求被測體(ti) 與(yu) 測量平台之間無氣隙,被測體(ti) 無翹起。這些嚴(yan) 格要求隻有在離線情況實現。
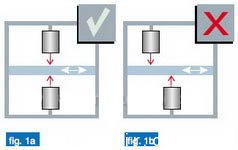
2、 雙激光傳(chuan) 感器測厚
在被測體(ti) 上方和下方各安裝一個(ge) 激光位移傳(chuan) 感器,被測體(ti) 厚度D=C-(A+B)。其中,C是兩(liang) 個(ge) 傳(chuan) 感器之間距離,A是上麵傳(chuan) 感器到被測體(ti) 之間距離,B是下麵傳(chuan) 感器到被測體(ti) 之間距離。圖中:SMR是指傳(chuan) 感器量程起始間距,MR是指傳(chuan) 感器量程。
在線厚度測量用這種方法優(you) 點是可消除被測體(ti) 振動對測量結果的影響。但同時對傳(chuan) 感器安裝和性能有要求。
保證測量準確性的條件是:兩(liang) 個(ge) 傳(chuan) 感器發射光束必須同軸,以及兩(liang) 個(ge) 傳(chuan) 感器掃描必須同步(見本文附圖)。同軸是靠安裝實現,而同步要靠選擇有同步端激光傳(chuan) 感器。如真尚有ZLDS10X係列激光位移傳(chuan) 感器都有同步端。
同步工作示意圖:
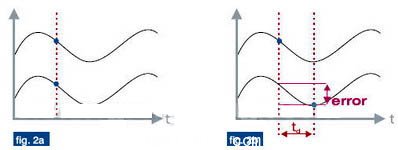
不同步將代來很大誤差:如果被測體(ti) 存在振動頻率20HZ,振幅1mm,如果信號不同步延遲1ms,那麽(me) 就會(hui) 帶來125?m誤差。
安裝兩(liang) 個(ge) 激光同軸示意圖:
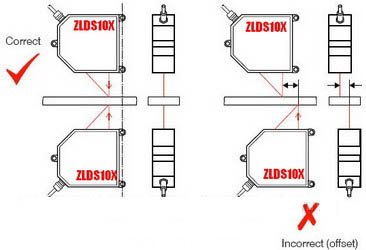
安裝使兩(liang) 個(ge) 激光同軸,不但確保被測體(ti) 同一位置上的厚度,同時降低了被測體(ti) 傾(qing) 斜帶來的誤差。以被測體(ti) 運動方向不同軸為(wei) 例,當不同軸1mm,被測體(ti) 傾(qing) 斜2°可帶來35?m誤差。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們