





精密雷射掃描係統的特點在於(yu) 其能夠在保持預期路徑位置的同時執行具有挑戰性的輪廓運動。這可以稱為(wei) “最小追蹤誤差” 或 “最小追隨誤差”。實現高產(chan) 能、高精度雷射掃描係統涉及多種因素。為(wei) 簡化說明,必須有兩(liang) 個(ge) 主要技術元件協同工作以提供這種性能:
1、機械解決(jue) 方案 - 雷射掃描頭本身。
2、控製解決(jue) 方案 - 雷射掃描頭的運動控製器和驅動係統。
雷射掃描頭通常由鏡片兩(liang) 片鏡片組成,每片鏡片都直接耦合到其自身的伺服控製馬達,並配有精密反饋裝置。這些馬達-鏡片-反饋元件的設計及其相關(guan) 的機械支撐結構為(wei) 整體(ti) 係統的潛在性能設置了基準。為(wei) 了進行此應用說明中描述的測試,使用相同的機械設置來比較兩(liang) 個(ge) 不同的控製平台。
控製解決(jue) 方案始於(yu) 運動控製器,將期望的軌跡(通常使用G-Code編程語言描述的弧線和直線)轉換為(wei) 一係列控製點(稱為(wei) “軌跡點”),然後這些控製點被發送到獨立的伺服控製器——每個(ge) 馬達一個(ge) 。這些點是伺服控製器的輸入,伺服控製器對這些點進行內(nei) 插以匹配伺服控製回路的操作速率。為(wei) 了實現高度精確的矢量運動,每個(ge) 獨立的伺服控製器必須同步接收和使用這些命令位置。這種同步控製使功率放大器的協調運動成為(wei) 可能,從(cong) 而控製雷射掃描頭中每個(ge) 馬達的運動,最終為(wei) 過程提供精確的矢量雷射點位置。
為(wei) 了控製AGV20HP-2振鏡掃描儀(yi) ,將新Automation1運動控製平台的能力與(yu) 業(ye) 界標竿A3200運動控製平台的能力進行了比較。請參見表1以比較這些係統。
表1 | Automation1 平台 | A3200 平台 |
輸入軌跡 | 輸入軌跡 10x10度的方形圖案,角落半徑為(wei) 0.5度,命令速度為(wei) 1000度/秒(1) | |
測試 | 測試 #1:運動控製器將軌跡轉換為(wei) 伺服控製點,不應用有限脈衝(chong) 響應(FIR)濾波。 | |
測試 #2:運動控製器將軌跡轉換為(wei) 伺服控製點,並在此轉換過程中同時應用有限脈衝(chong) 響應(FIR)濾波。 | ||
運動控製器 | Automation1-iSMC 智能軟件機器控製器 | A3200 SMC 軟件機器控製器 |
軌跡速率 | 100 kHz | 48 kHz |
運動總線 | Automation1 HyperWire | A3200 FireWire over HyperWire |
驅動電子裝置 | Automation1-GL4 伺服控製器頻率為(wei) 200kHz | Automation1-GL4 伺服控製器頻率為(wei) 192kHz |
軌跡到伺服內(nei) 插速率 | 1:02 | 1:04 |
雷射掃描頭 | AGV20HP | AGV20HP |
表1. 本應用說明中測試的 Automation1 和 A3200 控製係統比較。
軌跡以機械角度(鏡麵旋轉)指定,而不是雷射束的光學角度。 如表1所示,Automation1 運動控製器生成軌跡點的速率是 A3200 控製器的兩(liang) 倍多。這使得 Automation1-GL4 能夠將其伺服控製頻率提高4.2%(從(cong) 192kHz到200kHz),並將所需的內(nei) 插速率從(cong) 1:4降低到1:2。
圖1. Aerotech 的 Automation1-GL4 是一款高性能的雙軸雷射掃描頭驅動器。從(cong) 這些測試結果中可以看出,當與(yu) Automation1-iSMC 運動控製器配合使用時,其性能更是出色。

雷射掃描頭性能測試 雷射掃描頭通常利用特殊光學器件將鏡片的旋轉運動轉換為(wei) 雷射點沿工件的線性運動。本說明中進行的測試僅(jin) 僅(jin) 是測量驅動各個(ge) 鏡片的每個(ge) 馬達的位置,而不是測量物理雷射過程的實際性能。相反,這些測試假定根據編碼器反饋提高馬達定位性能,將轉化為(wei) 整體(ti) 係統級性能的改進。
第一個(ge) 測試顯示了在軌跡轉換過程中不應用有限脈衝(chong) 響應(FIR)濾波器時,運動控製器運行上述軌跡的性能比較。第二個(ge) 測試包括每個(ge) 運動控製器應用的FIR濾波器。在每個(ge) 控製器上,選擇的FIR濾波器抽頭數量使伺服回路頻率響應的衰減類似於(yu) 更高頻率內(nei) 容。
Description | Units | Automation1 | A3200 | Automation1 Improvement |
XY 矢量位置誤差, Pk-Pk | mdeg | 2.872093 | 3.483799 | 17.56% |
XY 矢量位置誤差, Std. Dev. | mdeg | 0.287080 | 0.653970 | 56.10% |
表2. 測試 #1 - 無 FIR 濾波 - 如馬達編碼器讀取的所描述軌跡的位移誤差 描述 單位 Automation1 A3200 Automation1 改進
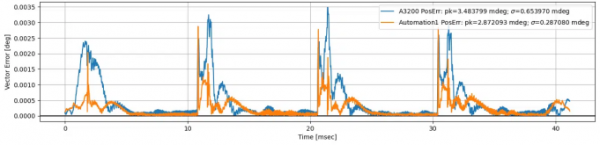
Figure 2. Test #1 – No FIR filtering
Description | Units | Automation1 | A3200 | Automation1 Improvement |
XY 矢量位置誤差, Pk-Pk | mdeg | 1.872906 | 3.300665 | 43.26% |
XY 矢量位置誤差, Std. Dev. | mdeg | 0.254938 | 0.569312 | 55.22% |
表3. 測試 #2 - 應用 FIR 濾波 - 如馬達編碼器讀取的所描述軌跡的位移誤差

Figure 3. Test #2 – FIR filtering applied.
總結
總而言之,Automation1 運動控製平台在雷射掃描頭係統中的增加軌跡速率、提高伺服速率和降低所需的內(nei) 插速率顯著改善了通常稱為(wei) “追蹤”或“跟隨”輪廓運動的性能。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們