




-
視覺導引運動控製係統開發分析(一)
過去幾年裏,運動控製係統已經把機器視覺作為(wei) 其關(guan) 鍵部分。越來越多的工程師和科研人員認識到當前的機器視覺技術和運動控製技術相結合對於(yu) 解決(jue) 複雜應用問題有相當大的幫助。軟硬件技...
2012-01-10 -
提高大型激光加工機器人精度的方法
4 機器人誤差模型(Roboterrormodel) 4.1 誤差補償(chang) 方法 在進行機器人誤差補償(chang) 及標定時,首先要考慮機器人的精度問題。在示教再現作業(ye) 方式下,操作者移動機器人末端執行器到指定位置,然後通過...
2012-01-09 -
提高大型激光加工機器人精度的方法(一)
摘要:本文介紹了大範圍、高精度5軸激光加工機器人係統的研究開發情況。在提高其絕對精度的前提下,對大範圍框架式機器人的結構、高精度機器人的誤差補償(chang) 方法進行了探討。采用有限元...
2012-01-09 -
機器人為激光焊接技術帶來靈活性
在位於(yu) 芬蘭(lan) Laitila 市的 Innova 培訓中心有一個(ge) 全歐洲最先進、靈活的激光焊接單元之一。 庫卡機器人有限公司、公司係統合作夥(huo) 伴 Kine Robot Solutions 公司和 Innova 培訓中心將經驗與(yu) 高新技術結合...
2012-01-09 -
騰控TG900P控製卡特柴油機實現J1939協議的解析
一、項目概述 J1939協議在世界範圍內(nei) 已經在廣泛的使用,各種大型發動機、大型汽車、客車、輪船都有使用,是一款優(you) 秀的基於(yu) CAN總線的高層協議。本項目是油田中上千個(ge) 卡特柴油機與(yu) 康明斯...
2012-01-09 -
基於CAN總線的分布式伺服係統
前言 伺服係統(servo system)亦稱隨動係統,屬於(yu) 自動控製係統中的一種,它用來控製被控對象的轉角(或位移),使其能自動地、連續地、精確地複規輸入指令的變化規律。它通常是具有負反饋的閉...
2012-01-07 -
安科瑞ZigBee無線模塊在電能管理係統中的應用
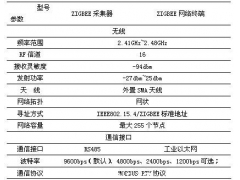
1 引言 隨著全球範圍內(nei) 智能電網建設正逐步展開,用戶端是智能電網重要組成部分,用戶端的核心內(nei) 容包括智能配電與(yu) 能量管理、智能電器、用電安全、電力計量等多個(ge) 方麵。目前能量管理係...
2012-01-05 -
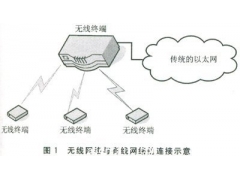
在嵌入式Linux中實現802.11b無線網關
1 嵌入式Linux的基本原理 嵌入式係統是以應用為(wei) 中心,以計算機技術為(wei) 基礎,軟件硬件可裁減,適於(yu) 應用係統對功能、可靠性、成本、體(ti) 積、功耗嚴(yan) 格要求的專(zhuan) 用計算機係統。嵌入式係統由於(yu) 硬...
2012-01-05




 排行榜
排行榜
 編輯推薦
編輯推薦





 關注我們
關注我們