




-
並聯機器人激光加工係統的開發(四)
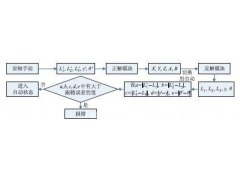
4 插補 算法 的設計 (Design of the interpolationalgorithm) 用並聯機器人進行 激光加工 主要是控製 激光 焦點的運動,並保持激光處於(yu) 工件當前加工點的法線方向.並聯機器人是由複雜的空間機構組...
2011-09-17 -
並聯機器人激光加工係統的開發(三)
3.2 正反解多解問題 在求解並聯機器人正反解方程的過程中存在方程多解問題:在正解計算中一組實軸坐標對應兩(liang) 組虛軸坐標,其中有一組虛軸坐標位於(yu) 靜平台(平麵)上方,可舍去;在反解計...
2011-09-17 -
並聯機器人激光加工係統的開發(二)
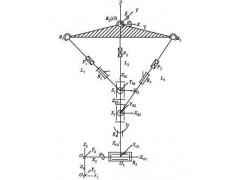
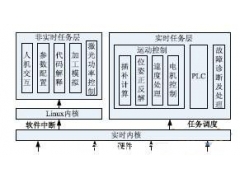
3 位置正反解模塊的實現 (Realization of the forward and inverse displacement modules) 上述功能中,不同於(yu) 傳(chuan) 統數控係統之處在於(yu) 係統中需要根據機械結構實際的機構模型嵌入特定的位姿正反解模型.因...
2011-09-17 -
並聯機器人激光加工係統的開發(一)
1 引言 (Introduction) 激光焊接 作為(wei) 新的焊接工藝方法在汽車製造領域有大量成功的應用, 顯示 出激光焊接強大的生命力和非常廣闊的應用前景.采用並聯機構可以進一步提高 機器人 的負載...
2011-09-17 -
多軸運動控製係統配置結構淺談
以工控機為(wei) 核心,結合現有使用的控製係統及交流變頻器和伺服電機的種類,針對焊接機器人用數控焊接變位機的控製問題,以三軸運動控製卡PCL-832作為(wei) 控製核心,建立了機器人用數控焊接變...
2011-09-16 -
德國赫優訊netLINK Proxy網關在奔馳-戴姆勒工廠中的應用
通過Profibus設備接口實現Profinet連接 如今,車輛中安裝的所有部件都能夠被追蹤並且確定其質量及來源。這歸功於(yu) 生產(chan) 中伴隨著的質量控製。特別對於(yu) 自動化係統,在大量的生產(chan) 階段中部件被反...
2011-09-16 -
運動控製卡在專機係統中具有更大的靈活性和開放性
作為(wei) 基於(yu) PC機的上位控製單元,運動控製卡在專(zhuan) 機係統的開發過程中,具有更大的靈活性和開放性。使得用戶能在短期內(nei) 開發出功能強大的運動控製係統。正因為(wei) 以上的特點,專(zhuan) 業(ye) 運動控製卡不...
2011-09-16 -
運動控製卡是什麽以及其它功能淺談
運動控製卡是基於(yu) PC總線,利用高性能微處理器(如 DSP )及大規模可編程器件實現多個(ge) 伺服電機的多軸協調控製的一種高性能的步進/伺服電機運動控製卡,包括脈衝(chong) 輸出、脈衝(chong) 計數、數字輸入...
2011-09-16


 排行榜
排行榜
 編輯推薦
編輯推薦




 關注我們
關注我們