




遠程激光焊接已經正在成為(wei) 一種替代傳(chuan) 統汽車白車身應用中電阻點焊的一種手段。根據行業(ye) 調查,已安裝的設備超過60套,主要集中在歐洲和北美地區。遠程激光焊接技術發揮了單側(ce) ,非接觸式激光焊接帶來的技術和經濟優(you) 勢,並將其與(yu) 高速掃描鏡片帶來的優(you) 勢相結合,大大縮短了焊接時間,在整個(ge) 焊接流程中增加了總生產(chan) 效率。
遠程激光焊接的優(you) 勢是最為(wei) 顯著的,如果和傳(chuan) 統激光/機器人焊接的一些工作周期相比:20mm的縫焊能在0.2-0.4秒內(nei) 完成,重複定位時間最大3秒,而對於(yu) 遠程焊接來說焊接時間相同,重複定位時間僅(jin) 為(wei) 0.2秒。遠程焊接的關(guan) 鍵優(you) 勢在於(yu) 降低了定位時間,這是由於(yu) 裝備了高速的光束掃描裝置(見圖1)。
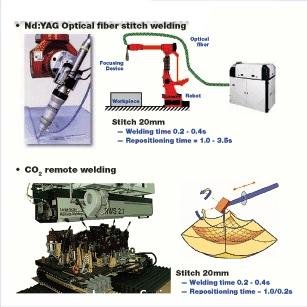
圖1. 遠程焊接的關(guan) 鍵優(you) 勢是通過高速光束
掃描降低了定位時間
Comau Pico公司很早就曾為(wei) 推動遠程激光焊接技術的發展作出努力,他們(men) 曾通過和一些具有前瞻想法的汽車製造商合作,在白車身生產(chan) 上開辟了新領域。在公司早期獲得的成就當中有一項是同Rofin Sinar公司合作,采用一台基於(yu) CO2 激光的遠程焊接設備,利用掃描鏡片以高速反射光束,焊接車身件的多個(ge) 焊接位置。
在Fiat Marea車的一個(ge) 典型部件上,遠程CO2 激光焊接被用來替代電阻點焊,它主要用來消除在車後部尾門上采用膠粘劑帶來的成本。在這一應用中,總的激光縫焊時間是5秒。在對該車型門框的焊接上,43條激光焊縫僅(jin) 需30秒就能完成,替代了傳(chuan) 統的電阻點焊。在這兩(liang) 種應用中,重複定位時間的降低高達94%。
Comau公司在同Rofin合作獲得以上這些應用的經驗之後,開始認識到該係統能提供以下的優(you) 勢:高生產(chan) 率(高達120個(ge) 焊點/分),高柔性,減少的占地麵積(大多數汽車廠的主要成本因素之一),以及焊接各種不同外形零件的能力。
但是,如果不考慮使用的遠程焊接係統,從(cong) 零件來看,它們(men) 必須被緊緊裝夾在每個(ge) 焊接工位。這使得設計和製作夾具成為(wei) 必需,在一些應用中甚至非常複雜。另一方麵,其優(you) 點在於(yu) ,更經濟,占用更少空間,相比要使用6到8個(ge) 夾具的點焊來說,遠程焊接的夾具僅(jin) 需一個(ge) 。
Comau 也認識到傳(chuan) 統的遠程焊接係統上的掃描盒存在一些限製,因為(wei) 它不可能移動遠程焊接頭。因此Comau開發並申請了一項專(zhuan) 利,這是一種快速光束傳(chuan) 遞係統,在安裝到傳(chuan) 統的龍門型係統上後,能提供四軸的運動(見圖2)。采用該方式的新單元可帶來更高產(chan) 量,高速在零件上移動光束的能力替代了移動部件,並且降低了相關(guan) 工具的複雜性和成本。這一概念允許用戶在龍門框架範圍內(nei) 的任何地點完成焊接。
#p#分頁標題#e#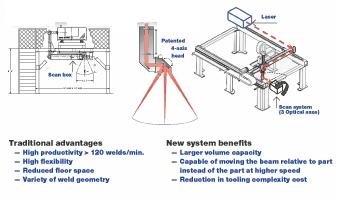
圖2.傳(chuan) 統的掃描盒被專(zhuan) 利的快速光束傳(chuan) 遞係統替代
和Agilaser公司配合,超過12台甚至更多的遠程激光焊接設備現在正在Fiat位於(yu) 意大利各個(ge) 工廠運轉, 在Mirafiori它們(men) 為(wei) Idea和Musa兩(liang) 款車型焊接部件;在Melfi它們(men) 一直焊接Punto的部件,在Cassino它們(men) 焊接新Stilo的部件。係統同樣被安裝在Renault公司位於(yu) 斯洛文尼亞(ya) Novo Mesto的工廠,用於(yu) 焊接Clio和Twingo的部件,以及法國Saundoville工廠,焊接Megane的部件;在意大利Pomigilano焊接Stola、Ducato和Alfa159的部件。
在Mirafiori 工廠,一套Agilaser激光設備替代了一條機器人電阻點焊線,它采用雙夾具遠程焊接係統用於(yu) 車門裝配線,生產(chan) 投資降低了15%,而生產(chan) 率提升了20%,同時降低了占地麵積——和傳(chuan) 統的四機器人焊接係統相比減少了50%。結果是采用激光遠程焊接後單件成本降低了30%。
Renault 采用一套Agilaser焊接C85的前門部件(見圖3),替代了原先使用的需要12台機器人電阻焊的係統,原係統需要占地1050m2 ,而采用5機器人加工站的 Agilaser僅(jin) 占地808 m2 。兩(liang) 台 Agilasers以66秒的周期生產(chan) 部件,焊接93條右側(ce) 及左側(ce) 激光焊縫,而以前需要電阻點焊130個(ge) 右側(ce) 和左側(ce) 焊點。在 Renault公司,一台Agilaser在C65型號的前門焊接38條激光焊縫,僅(jin) 使用兩(liang) 套相同的夾具。

圖3. Renault使用一台 Agilaser焊接C85的前門部件
盡管這些CO2 激光係統從(cong) 所記錄的正常工作時間來看,穩定性超過98%,但它們(men) 仍然沒有被認為(wei) 是主流的加工手段,這是由於(yu) 它們(men) 先天在CNC機床結構上的問題導致。因為(wei) 幾乎所有的汽車部件和車身焊接是通過關(guan) 節型的機器手完成的,而如果使用激光,可選的光束傳(chuan) 遞方式就是通過光纖。
作為(wei) 將遠程焊接帶入下一個(ge) 階段所作的努力和歐洲“遠程焊接”項目的一部分,Comau公司開發了3D掃描頭,並在兩(liang) 年前第一次在慕尼黑激光展上亮相。這一係統配備了Rofin Sinar 4.0千瓦半導體(ti) 二極管泵浦Nd:YAG激光器,光束傳(chuan) 遞通過一根捆綁在傳(chuan) 統機器手上的400微米直徑的光纖。Comau Pico 很快認識到這種模式帶來的限製,特別是在使用更高光束質量(更高亮度)激光器如圓盤激光器和光纖激光器時。
在大部分遠程激光掃描頭上,F-theta 鏡用來將光束的焦點保持在和鏡片固定距離的位置上,而不論光束的方向性。這一昂貴的設施有很大的直徑,其工作範圍稍大於(yu) 其直徑,由於(yu) F-theta 使得光束相對鏡片保持垂直,其代價(jia) 是犧牲光束質量和#p#分頁標題#e#光斑大小的變化。而這同樣意味著掃描頭必須持續重定位並/或放置,采用動態的六軸標準關(guan) 節式機器人係統。 Comau Pico的SmartLaser(見圖4)實質上把鏡片集成進空心的機械手中。這一光學準直/放大模塊 (類似望遠鏡)取代了用於(yu) 傳(chuan) 統激光掃描設備上的F-theta 模塊(見圖5)。

圖4. SmartLaser是高速3D係統
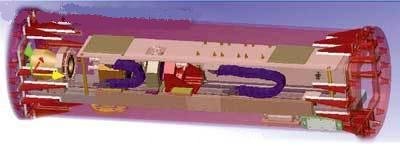
圖5.該光學準直/放大模塊取代了 F-theta
模塊在傳(chuan) 統激光掃描設備上的位置
在SmartLaser背後的想法是創造一種高速3D係統,其加速度比機器人要高60到70倍,在焊接區域內(nei) 擁有8g的動態加速度。該係統擁有的可編程焦距大於(yu) 750mm,實際上在750mm到1200mm之間,能極大擴展係統的工作距離。這還意味著所有的光學軸,鏡筒的X,Y和Z軸和掃描頭都能完全集成在焊接係統中,擁有全麵的離線編程能力。該創新的掃描頭(見圖6)裝配在機器手前臂的端部,包括兩(liang) 塊鏡片,第一塊在30度角範圍運動,另一塊在240度角範圍運動。該集成允許快速的重複定位,在景深上能得到2到3倍的增加而光斑的大小變形幾乎可忽略不計。

圖6. 前臂端部的掃描頭包括兩(liang) 塊鏡片,第一塊在30度角範圍運動,
另一塊在240度角範圍運動
不像其他掃描頭遠程焊接係統,該係統所有的軸,運動部件和鏡片,均由一個(ge) 標準的軸控器通過視校麵板操縱。這使得編程非常簡單便能控製所有的焊接參數,光束方向以及重新定位時的激光變化。
機器人擁有最大化的工具中心點速度 1.5 m/s ,加速度1.2 m/s2 。鏡片軸有最大速度4 m/s ,加速度80 m/s2。SmartLaser係統 100mm距離的Z向定位時間僅(jin) 為(wei) 70 ms ,而采用二維掃描頭的傳(chuan) 統機器人需要 580 ms。這意味著我們(men) 能在一個(ge) 焊接周期內(nei) 完成高達200到300條焊縫的焊接。
光纖和光耦連接在機械手上而不是掃描頭上,從(cong) 而降低了機械應力和疲勞強度,減少了光纖損壞的可能。這和其他的特征一起降低了維護的要求。
Comau目前正在歐洲#p#分頁標題#e#測試第一台SmartLaser 係統,並且將有一台在美國進行用戶測試。公司希望看到在下一年初獲得來自汽車行業(ye) 的第一筆訂單。可以想到的是分時多工位/機器人安裝能被用於(yu) 依次加工多個(ge) 部件,因而激光器一直都在焊接狀態,一個(ge) 工位焊接的同時新的部件也在其他工位完成上料。
結論
遠程激光焊接的概念仍然在發展當中,係統不斷被改良以滿足用戶生產(chan) 中的需求。
供應商正努力降低高昂的初始設備投資和夾具複雜性所帶來的影響。激光技術的發展,比如更短波長和光纖及鏡片導光方式正在研究當中,此外還有不使用保護氣體(ti) 的手段。
使用傳(chuan) 統激光器進行多工位加工以最大化激光使用時間,用於(yu) 更高產(chan) 量的生產(chan) 已經成為(wei) 了現實。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們