




它能直立、能執行一定的任務,它甚至會(hui) 跳舞——這就是3D打印的人形機器人DyRoS。這是由韓國新成立的Digital Human Research Center(DHRC)正在研發的一個(ge) 項目,該項目得到了韓國融合技術先進研究院(AICT)的資助。上周,研究團隊帶著DyRoS在人形機器人的國際會(hui) 議——Humanoids 2014上進行了展示。
3D打印的DyRoS不僅(jin) 是一個(ge) 工程項目,而且在美學上也是一個(ge) 探索,它的創造者希望看到藝術和工程集成融合在一起——所以就為(wei) 這個(ge) 機器人設計了一套韓國現代舞表演。在研發團隊為(wei) 此發表的論文《Aesthetic Design and Development of Humanoid Legged Robot(美學設計與(yu) 仿人腿式)》中,美學是該論文討論的最重要的主題之一。
顯然,這樣的觀點稍顯超前。就目前而言,人們(men) 更重視的是人形機器人的運動能力以及它“走”得怎麽(me) 樣。不過設計人員指出,美觀要比這個(ge) 機器人的行動方式向人類靠攏更為(wei) 重要。雖然它並不需要看起來完全像一個(ge) 人,但是如果機器人的大致輪廓和特征尺寸與(yu) 人類更為(wei) 接近的話,那麽(me) 它的能力就更容易被人們(men) 所接受。
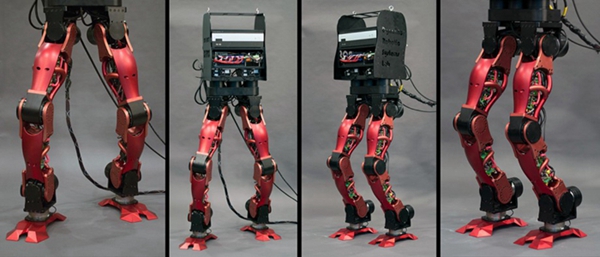
DyRoS是在韓國製造的,所以機器人的大小比例近似於(yu) 韓國女性的平均比例。它的兩(liang) 條3D打印的“腿”不僅(jin) 在模仿人體(ti) 解剖學的基本結構,同時還為(wei) 其安上了馬達。
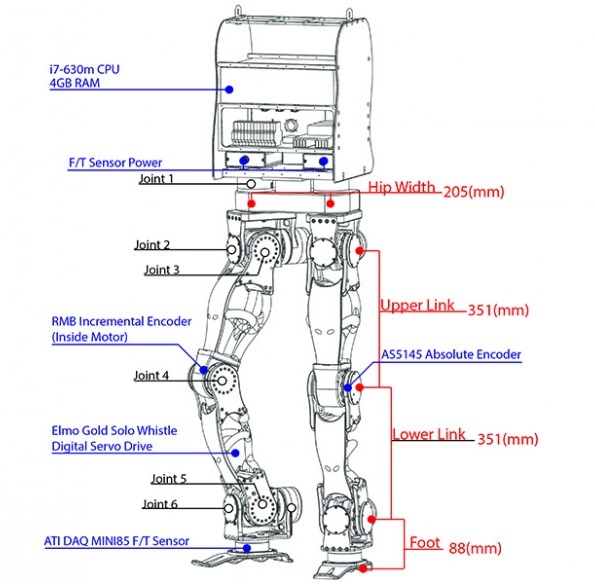
研發團隊在對DyRoS的行走和結構方麵進行測試的時候進行了大量的應力分析。據了解,運動、緊湊的設計以及便於(yu) 安裝電子器件是其中的重點。尤其是為(wei) 了為(wei) 它選擇合適的馬達以適應這款3D打印機器人的尺寸和運動特點,研究人員對其下蹲和步行運動進行了廣泛的測試,最終在其關(guan) 節上配置了科爾摩根(Kollmorgen)電機和諧波齒輪。
此外,韓國動態機器人係統實驗室(Dynamic Robotic Systems Lab,DRSL)也參與(yu) 了這個(ge) 項目——DHRC牽頭美學設計和製造,而DRSL則負責電子和機械製造的部分。
DyRoS是從(cong) 一個(ge) 簡單的草圖經過多次迭代變成3D設計,然後使用3D打印機製造出零部件進行組裝,並反複測試。研究人員使用3D Studio Max為(wei) 機器人設計了外觀效果,把紅色和黑色作為(wei) 其外觀的主要色調。

DyRoS的結構設計是由看似簡單的一個(ge) 個(ge) 框架使用大量的小螺絲(si) 組裝而成的,之所以這樣設計是為(wei) 了更方便於(yu) 植入電子設備。控製計算機被放置在了上部的“軀幹”部分,以便於(yu) 未來的設計和開發。這台控製計算機配置了Intel I7-630m處理器和4G DDR3內(nei) 存,裏麵運行的實時控製軟件roboticsLab。
DyRoS機器人的總重量為(wei) 38.795公斤,其中26.112公斤是結構部件,而其餘(yu) 則是螺釘和電子部件的重量。
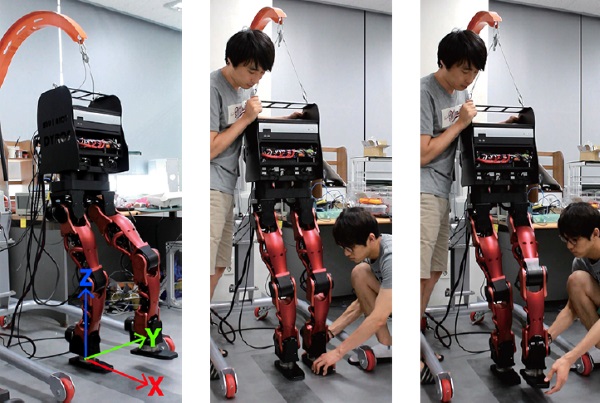
目前,DyRoS項目還處於(yu) 研發過程中,顯然,研究團隊還隻是完成了下半身,主要是雙腿的部分。而更為(wei) 複雜的上半身還需要繼續努力,不過研發團隊更為(wei) 關(guan) 注的是運動能力和外觀設計。

DyRoS項目是開源的,研究團隊希望更多的人參與(yu) ,他們(men) 共享了一些可3D打印的STL文件。“這些文件可以用來設計定製的機器人,或者在家裏用類似MakerBot的3D打印機打印出我們(men) 設計的機器人。我們(men) 會(hui) 很期待有人能夠結合我們(men) 的模型,設計製造出更小的電機外殼,從(cong) 而製作出成本更低的機器人版本。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們