




New Infrared Technologies, Ltd., Calle Vidrieros, 30 - Nave 2, 28660 Boadilla del Monte, Spain Aimen Centro Tecnologico. C/ Relva, 27 A. Torneiros, 36410 Porrino (Pontevedra), Spain
翻譯者:黃勝弟 南京波長光電科技股份有限公司 bob@wavelength-oe.com
王雪琴 南京波長光電科技股份有限公司 13952029004@163.com
結合靈活性、生產(chan) 率、精度和零缺陷生產(chan) ,未來激光加工設備麵臨(lin) 的一大挑戰是使能技術。為(wei) 了提高產(chan) 品質量,增加生產(chan) 產(chan) 量,基於(yu) 激光加工過程的在線監測和實時控製需要尋求新的傳(chuan) 感器。追求零缺陷生產(chan) 的全自動化加工新方法需要智能焊接頭,該智能焊接頭將激光器、光學器件、執行器、傳(chuan) 感器和電子器件集成在一個(ge) 獨特、緊湊且經濟的設備上。
激光製造過程產(chan) 生的許多缺陷來自激光加工動力學的不穩定性,溫度和熱動力學是監測的關(guan) 鍵因素。具有高速響應特性的低成本紅外成像傳(chuan) 感器將成為(wei) 新一代傳(chuan) 感器,用在未來的基於(yu) 激光加工過程的監控係統中,它能夠同時提供熱動力學信息和空間分布信息。
本文介紹了新型的、低成本的、高速的紅外成像傳(chuan) 感器的使用結果,此傳(chuan) 感器是以單片集成了市場上的Si-CMOS ROIC的先進量子紅外成像傳(chuan) 感器為(wei) 基礎。該傳(chuan) 感器與(yu) 相同成本下的傳(chuan) 統紅外點探測器相比,能夠提供低分辨率圖像,在非製冷運行狀態下幀速可達到10kHz。為(wei) 了證明新傳(chuan) 感器技術性能,將一個(ge) 低成本相機安裝在一個(ge) 標準產(chan) 品的激光焊接頭上,允許相機以10kHz的幀速率記錄熔池圖像,並開發特定的軟件對缺陷進行檢測和分類,通過記錄多個(ge) 激光焊接過程來研究係統性能和它在激光焊接過程實時監測中的應用性能。在實驗過程中,會(hui) 產(chan) 生不同類型的缺陷,並對其進行檢測,向分類器輸入這些獲得的實驗圖像,通過自主學習(xi) 策略實現了很有希望的結果,論證了使用低成本、高速紅外成像傳(chuan) 感器在推動生產(chan) 係統向實時/在線零缺陷生產(chan) 方向發展的可行性。
關(guan) 鍵詞:非製冷中波紅外,紅外,FPA成像,高速,激光焊接,缺陷實時檢測
1. 簡介
在工業(ye) 中,激光技術的使用正飛快增長,激光加工占金屬加工年度總收入的74%,隨著市場需求的不斷增加,超過了過去一年7%。汽車、金屬轉化或增材製造是激光加工在工業(ye) 領域應用的例子,並被廣泛使用。由於(yu) 激光加工過程參數不確定,實時(RT)監控是激光加工研究的一個(ge) 重大課題。
激光加工過程中造成產(chan) 品缺陷的主要原因是熱動力學、溫度和熱循環,因為(wei) 它們(men) 決(jue) 定材料不希望的脆性相和殘餘(yu) 應力,這些影響可能會(hui) 使構件的力學行為(wei) 受損,導致產(chan) 品加工失敗。熱分布和熔池(激光熔覆)的幾何尺寸或小孔(激光焊接)是其監測的關(guan) 鍵參數,通過控製這些參數來確保激光加工的產(chan) 品質量。
激光加工設備實現將靈活性、生產(chan) 率、精度和零缺陷生產(chan) 結合,這是一項重大挑戰。為(wei) 了提高產(chan) 品質量,增加生產(chan) 產(chan) 量,基於(yu) 激光加工過程需要新的在線實時監控係統,新的激光源和加工頭正向增強通用性和複雜性演變,允許修改不同過程參數,如激光調製、自適應聚焦等。實現全自動化和零缺陷製造過程的新方法將需要智能焊接頭,該智能焊接頭將激光器、光學器件、執行器、傳(chuan) 感器和電子器件集成在一個(ge) 緊湊而經濟的設備上,該設備的最終目的能夠處理:
·不斷增加的過程複雜性
·不斷增加的精度和可靠性要求
·不斷增加的自治、重構和自診斷要求
新紅外傳(chuan) 感器的發展有助於(yu) 將零缺陷概念引用到工業(ye) 激光製造過程中。
低成本高速紅外成像傳(chuan) 感器
激光製造過程產(chan) 生的許多缺陷來自激光加工動力學不穩定,當明確需求,滿足新一代監控係統應用於(yu) 激光製造過程中,溫度和時間響應是要考慮的關(guan) 鍵參數。
在激光切割過程中,熔化的材料液滴必須從(cong) 切縫噴出,以避免渣和積渣,它的形成和分離所需要的時間要小於(yu) 0.5ms[1]。就激光焊接過程而言,孔內(nei) 擾動會(hui) 產(chan) 生焊縫小孔,擾動的振蕩時間要小於(yu) 0.7ms[2][3]。鍍層、修複或增材激光製造使用了激光熔覆技術,在無控激光熔覆過程中熔池尺寸變化1%的時間要小於(yu) 200ms[4][5]。使用選區激光熔化(SLM)技術進行增材激光製造,它所需要的時間為(wei) 0.13ms,用於(yu) 改變激光聚焦位置,變化的距離等於(yu) 聚焦半徑,所以在這段時間內(nei) 發生的任何擾動將會(hui) 導致缺乏精確性或在最後部分產(chan) 生氣孔[6]。在增材製造過程中,孔隙、空隙、鬆散粉末的形成和未熔透很依賴溫度變化過程,如冷卻和加熱速率,它對加工過程的關(guan) 鍵部分影響很大。
監測係統的采樣頻率必須是擾動現象造成缺陷頻率的兩(liang) 倍,因此,為(wei) 監測大多數激光製造過程,采樣頻率需要高達10kHz。現今,基於(yu) 激光加工過程的大多數工業(ye) 監測係統使用基於(yu) 矽的相機(VIS-VNIR),將相機耦合到標準的基於(yu) 單點紅外探測器的非接觸式溫度係統,對焊縫區進行實時的溫度測量。這些類型的係統提供的信息不充分,是平均、空間和時間的結果,采集的紅外信號僅(jin) 用了一個(ge) 傳(chuan) 感器,失去了溫度分布和熱動力學的相關(guan) 信息,更重要的問題是涉及到目標運動或聚焦距離,會(hui) 經常出現錯誤(即不可用)的測量結果。
基於(yu) 高速紅外成像傳(chuan) 感器的解決(jue) 方案能夠同時提供熱動力學信息和空間分布信息,然而,高靈敏度紅外傳(chuan) 感器曆來與(yu) 高成本掛鉤,通常超出行業(ye) 標準範圍。而低成本紅外技術如微測輻射熱計或熱釋電器件在響應速度方麵不能滿足要求,另一方麵,量子紅外探測器的響應速度是足夠快,但由於(yu) 其複雜性和技術成本,在過去這一行業(ye) 中,它們(men) 的使用受到限製。幸運的是,今天紅外技術的發展和低成本高速紅外成像傳(chuan) 感器已成現實。最近新紅外技術(NIT)公司已經使先進量子中波紅外成像傳(chuan) 感器商業(ye) 化,該傳(chuan) 感器單片集成Si-CMOS ROIC,提供的圖像分辨率低,非製冷運行時的幀速為(wei) 10kHz,與(yu) 傳(chuan) 統點探測器的成本相同。該技術可以被認為(wei) 是突破性的技術,滿足市場發展研究所預見的需求,該研究針對激光加工,如增材製造、焊接和鍍層。
激光焊接過程
激光焊接技術被廣泛應用在大的產(chan) 業(ye) ,如汽車、金屬加工、航空航天等。激光焊接技術有望替代傳(chuan) 統焊接技術是當今的趨勢。就效率、可重複性和維護而言,激光焊接技術相比於(yu) 其他焊接技術的優(you) 勢是明顯的。然而,激光焊接也有一些缺點,可能出現焊接缺陷,如洞穴、氣孔、未焊透和飛濺,這根本原因大多與(yu) 連接過程中所涉及的複雜機製有關(guan) 。為(wei) 了避免這些缺陷,需要對激光焊接過程進行正確的參數化,如激光功率、焊接速度、焦距、保護氣體(ti) 流和橫向位置,通過控製這些參數可以獲得更好的焊接質量。像激光光斑的幾何形狀、表麵清潔時的光和物質之間相互作用問題、材料質量與(yu) 材料組成以及接觸麵積,這些參數也都直接影響焊接質量。因此,需要更好的、改進的控製係統,該係統要統籌考慮動力(原因)和焊接區產(chan) 生的熱動力學及空間分布(影響)問題。
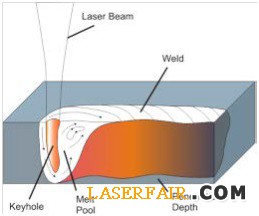
圖1. 激光焊接示意圖
有幾個(ge) 特征信號與(yu) 激光焊接過程相關(guan) [7],如果激光束的輻射能量足夠熔化金屬,將激光束聚焦在或聚焦到工件的表麵,在熔化的金屬裏會(hui) 形成小孔,這小孔有助於(yu) 熔池的金屬蒸發。焊接過程的主要信號來自熔池的紅外輻射,次要信號包括等離子體(ti) (主要在可見光和紫外線區)和聲波輻射,大多數焊接監測方法至少檢測出以上一種信號。就這項工作而言,利用小孔和熔池區的紅外輻射來檢測激光焊接過程中出現的不同類型的缺陷,高幀頻紅外圖像將起著關(guan) 鍵作用,它在整個(ge) 過程中為(wei) 缺陷檢測和分類提供了熱動力學信息。
2. 實驗安裝
紅外傳(chuan) 感器描述
NIT公司製造的紅外傳(chuan) 感器在非製冷實時運行時的幀速高達10kHz, 檢測的波長為(wei) 中波紅外,這在工業(ye) 過程監測中是一項突破,圖2為(wei) 該傳(chuan) 感器的TACHYON 1024 CORE模塊。
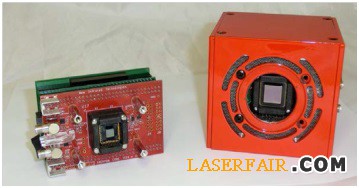
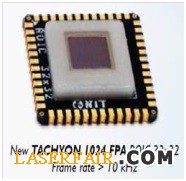
圖2. NIT公司的TACHYON 1024 CORE模塊:紅外相機(左)和FPA(右)
下表總結了TACHYON 1024 CORE模塊用於(yu) 試驗的主要參數。
表1. TACHYON 1024 CORE用於(yu) 試驗的主要參數
|
TACHYON 1024 CORE主要參數 |
|
|
Maximum frame rate (Hz) |
10000 |
|
Biasing Voltage range (V) |
0-4 |
|
Integration time (us) |
100-1000 |
|
Communication interface |
USB 2.0(up to 480Mbps) |
|
Data transmission |
Raw data,10 bits |
|
Acquisition trigger |
SMA connector; 2 modes: start/stop and burst |
|
Output trigger |
SMA connector, 1 pulse per image |
|
Power supply |
12VDC,500mA |
|
Dimensions L×W×H(mm) |
55×90×60 |
|
DLL library |
Available |
TACHYON 1024 CORE模塊(見圖2)集成的傳(chuan) 感器是一個(ge) 32×32像素的焦平麵陣列(FPA),該FPA對中波紅外(MWIR)(1-5um)波長敏感,其參數總結在表2中。
表2. TACHYON 1024 FPA(MWIR)用於(yu) 試驗的主要參數
|
TACHYON 1024 FPA(MWIR)主要參數 |
|
|
FPA Resolution |
32×32 |
|
Pixel size (um) |
130×130 |
|
Pixel pitch (um) |
135×135 |
|
A/D readout electronics |
On chip |
|
Dark current cancelation |
On chip |
|
I/O interfaces |
Digital |
|
Readout |
Snapshot |
|
Data format |
Raw,10 bit depth |
|
Packaging |
SMD/LCC 48 pins/560×560 mils/pitch 40 mils |
|
Power supply |
3.3V,<0.5W |
|
Pinout |
Control: 5 lines Gain, offset control (per pixel): 16 lines (serial comm., 10 MHz) Data output: 16 lines Max. read out speed: 10 KHz |
|
Integration time |
Programmable,100us-1ms |
激光頭和相機耦合
圖3顯示了NIT高速TACHYON 1024 CORE相機與(yu) 激光束同軸布置的實驗安裝,激光發射使用了4.4kW的Rofin Sinar Nd:YAG激光器,該激光器波長為(wei) 1.064um,激光束由安裝在ABB的6軸IRB 6600機器人上的Permanova WT03焊接頭發出。在本實驗報告中,機器人的速度範圍為(wei) 20-45mm/s,激光功率為(wei) 2700-4000W。實驗中涉及到搭焊的兩(liang) 個(ge) 不同鋅鍍層鋼片,厚度分別為(wei) 0.8mm和1.5mm。

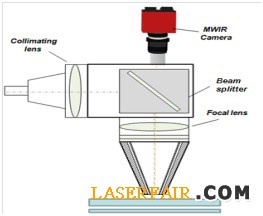
圖3. 激光焊接係統的實驗安裝,實際安裝(左)和方案(右)
3. 實時分類器
獲得激光焊接過程的熔池圖像,並在線分析圖像。圖4顯示了以2kHz幀速率獲得好的激光焊縫的紅外圖像,從(cong) 中可以看出焊接過程中產(chan) 生的飛濺物的密度。
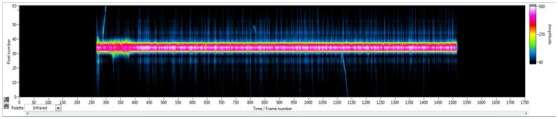
圖4. 以2kHz幀速率獲得激光焊縫的紅外圖像,藍線代表焊接過程中產(chan) 生的飛濺物
相機提供的原始圖像(即每秒2000幅圖像,每幅圖像1024個(ge) 像素,每個(ge) 像素10位)產(chan) 生了大量的數據,因此對大量圖像數據進行降維是必要的。數據降維采用了主分量分析(PCA),該方法使用最大方差的正交分量的一個(ge) 子空間來分解圖像的高維空間[8],僅(jin) 保存原始圖像數據的四個(ge) 主分量,這些分量表示具有最大方差的方向,這意味著利用PCA方法對圖像數據進行降維得到的特征向量與(yu) 熔池的幾何特征有關(guan) 。圖像數據由1024個(ge) 高壓縮到4個(ge) 使得缺陷分類更快速,並對電腦的資源需求更少。
創建標記缺陷的一個(ge) 數據集來訓練和測試檢測算法,該數據集由在焊接過程中得到的圖像生成,通過此來判別好的和有缺陷的接頭。首先,在最終標記缺陷之前,樣品標記上“OK”或“NOK”;其次,對“NOK”樣品進行鑒定和標記,辨別板間間隙(GAP)過大未焊透、板料變形(Deformation)未焊透、漏焊(Lack of weld)和開孔(Open Pore);最後,建立PCA主分量數組數據來訓練係統(圖5顯示了分類結果實例)。
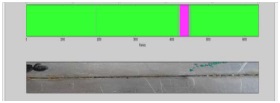
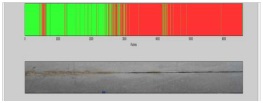
圖5. 分類結果實例:“變形”(左)和“間隙”(右)
軟件開發從(cong) TACHYON傳(chuan) 感器獲得原始的圖像數據,應用PCA方法降維,為(wei) 每幅焊接圖像生成一組新的數值,用K-最近鄰算法(KNN)[9]來分類這些值為(wei) “OK”或“NOK”。然後對“NOK”結果使用支持向量機(SVM)進行重分類,這次分類為(wei) :“板間間隙”、“變形”、“漏焊”和“開孔”。
4. 實驗結果
通過對缺陷的鍍鋅鋼板接頭獲得有特征的中紅外圖像數據集,來評估缺陷檢測和分類。結果在表3中給出,第一列是缺陷的類型,以下TP(true positives)代表正確,FP(false positives)代表誤報,FN(false negatives)代表漏報。表3顯示一些缺陷分類失敗,大多數這些失敗在於(yu) 缺陷類型之間混淆。
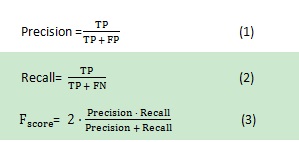
表3. 不同缺陷類型檢測和分類結果

表4通過建立混淆矩陣揭示了這種解決(jue) 方案的性能。缺陷的總數量為(wei) 20411個(ge) ,檢測到的缺陷為(wei) 20171個(ge) (98.8%的缺陷被檢測到)。比較表3和表4中的數字,僅(jin) 10.4%的缺陷沒被正確分類,雖然有23.7%是誤報,但是它們(men) 可以很容易地處理,因為(wei) 它們(men) 總是孤立的出現。
表4. 混淆矩陣分類結果
|
混淆表 |
GAP |
Deformation |
Open pores |
Lack of weld |
準確率(%) |
|
GAP |
4436 |
0 |
0 |
147 |
96.7 |
|
Deformation |
0 |
520 |
0 |
1920 |
21.3 |
|
Open Pores |
0 |
0 |
5591 |
33 |
99.4 |
|
Lack of weld |
147 |
1920 |
33 |
7524 |
78.2 |
5. 總結
激光焊接是一種最常用的現代工業(ye) 製造技術,為(wei) 了提高產(chan) 品質量,增加生產(chan) 產(chan) 量,基於(yu) 激光加工過程開發更好的在線實時監控係統是必要的。目前現有的大多數缺陷檢測係統工作需要設定合適的閾值,該閾值需要不斷地重複其過程來訓練獲得,這在工業(ye) 中是一個(ge) 問題,部件老化、材料純度差異或維護問題是非均質性常見來源,並且缺乏過程重複性。
本文提出了一種新的而經濟的方法,該方法使得激光製造過程更加趨向靈活、高效、精確和零缺陷生產(chan) 。已經證明基於(yu) 低成本、高速、非製冷中波紅外成像傳(chuan) 感器的機器學習(xi) 解決(jue) 方案能夠自動識別和分類焊接缺陷,即使將傳(chuan) 感器安裝在不具有自適應功能的標準激光頭上,大多數焊接缺陷都能夠被檢測出來,檢測成功率高達98.8%,對四種類型的缺陷進行分類:板間間隙、變形、開孔和漏焊。在大多數情況下,建立與(yu) 分類結果相應的混淆矩陣可以得到很好的分類結果,僅(jin) 10.4%的缺陷沒被正確分類。此外,係統的檢測和分類算法實現了檢測速率接近1kHz。
基於(yu) 非製冷成像PbSe傳(chuan) 感器的紅外傳(chuan) 感技術開辟了更徹底控製係統一體(ti) 化的途徑,該控製係統是基於(yu) 紅外傳(chuan) 感器來監測焊接過程質量,以合理的價(jia) 格應用於(yu) 未來的工廠。
本工作部分得到歐盟第七研發框架計劃(FP7)EC項目“Laser equipment assessment for high impact innovation in the manufacturing European industry”(LASHARE)支持,ID-609046。
參考文獻
[1] D. Schuocker, J. Aichinger, R. Majer, “Dynamic phenomena in laser cutting and process performance”, Acta Materialia 58 (2010) 3303–3312.
[2] V.V. Semak, J. A. Hopkins, M. H. McCay, T. D. McCay, “Melt pool dynamics during laser welding”, J. Phys. D: Appl. Phys. 28 (1995) 2443.
[3] A. Matsunawa, J.-D. Kim, N.i Seto, M.i Mizutani, and S. Katayama, “Dynamics of keyhole and molten pool in laser welding”, Journal of Laser Applications 10 (1998) 247.
[4] G. Zhao, C. Cho, J.-D. Kim, “Application of 3-D finite element method using Lagrangian formulation to dilution control in laser cladding process”, International Journal of Mechanical Sciences 45 (2003) 777–796.
[5] J.D. Kim, Y. Peng, “Melt pool shape and dilution of laser cladding with wire feeding”, Journal of Materials Processing Technology 104 (2000) 284-293.
[6] L. Thijs, F. Verhaeghe, T. Craeghs, J. Van Humbeeck, J.-P. Kruth, “A study of the microstructural evolution during selective laser melting of Ti–6Al–4V”, Acta Materialia 58 (2010) 3303–3312.
[7] P.G. sanders, G. Kornecki and K.H. Leong, “Real-time Monitoring of Laser Beam Welding Using Infrared Weld Emissions”, Technology Development Division. Argonne National Laboratory
[8] https://scikit-learn.org/stable/modules/generated/sklearn.decomposition.PCA.html
[9] Alipi, C., D’Angelo, G., Matteucci, M., Pasquettaz, G., Piuri, V., Scotti, F., “Composite techniques for quality analysis in automotive laser welding”. Computational Intelligence for Measurement Systems and applications, IEEE international symposium on, 72-77 (2003).
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們