




超廣角短距激光雷達是當前最新、發展更快的激光雷達細分市場。在18個(ge) 月前,Ouster便開始與(yu) 一家汽車OEM合作,研發超廣角短距激光雷達OS0,用於(yu) 滿足自動駕駛汽車、機器人及地圖等市場的特定需求。
通過與(yu) 合作夥(huo) 伴的溝通及獲得的客戶反饋,我們(men) 確定了三個(ge) 在實際應用中最重要的性能(除了超廣視場角外):
(1)對於(yu) 目標物探測:高分辨率;
(2)對於(yu) 近距離探測:0 cm最小探測距離;
(3)對於(yu) 3D地圖構建:高精度。
而對於(yu) 任何應用,OS0均可提供:90º垂直視場角 + 260萬(wan) 點/秒(MPS)的高分辨率數據輸出 + 0 cm最小探測距離 + 高達毫米級的精度。
對於(yu) 自動駕駛、機器人、地圖等對激光雷達有較高性能要求的客戶,OS0更是首選的超廣角激光雷達。
由紅外相機拍攝的OS0,90º垂直視場角
除了超廣視場角之外,OS0能夠探測到55 m處反射率為(wei) 80% 的物體(ti) 以及15 m處反射率為(wei) 10%的物體(ti) 。探測距離對於(yu) 短距激光雷達來說並不是最重要的因素,但當用作自動駕駛汽車盲區探測或低速機器人的唯一傳(chuan) 感器時,能夠探測到50 m又是非常有利的。
本文我們(men) 將深度分析OS0的關(guan) 鍵性能,說明這些性能對於(yu) 感知、定位、地圖等應用的意義(yi) ,並證明OS0在某些方麵的表現是現有市場同類產(chan) 品中最好的。
OS0特有的四大關(guan) 鍵性能:
(1)90º 超廣垂直視場角;
(2)128線超高分辨率;
(3)0 cm最小探測距離;
(4)毫米級精度。
90º超廣垂直視場角
OS0為(wei) 短距離物體(ti) 探測提供了90º的超廣垂直視場角,寬廣的視場角有助於(yu) 優(you) 化定位算法、加速室內(nei) 3D地圖構建。

OS0實測,距離倉(cang) 庫貨架2m
對於(yu) 機器人應用來說,90º的視場角可以完整捕捉整個(ge) 貨架的情況,滿足在室內(nei) 運貨的需求,同時還能為(wei) 精準定位提供額外的特征數據。
完整倉(cang) 庫運貨視頻:
對於(yu) 自動駕駛汽車來說,OS0的大視角可以探測到距離車輛1米的、從(cong) 頭到腳的、完整的行人。通過在車輛的四周安裝OS0,即可獲得車身360º 的完整數據,確保汽車能夠“看見”周圍的孩童、寵物、路沿、路障等更小的物體(ti) 。
尤其對於(yu) 定位來說,OS0最大可覆蓋路旁3層高的建築,如此大的覆蓋率可以為(wei) 定位算法提供更多的特征數據,有助於(yu) 提高定位的效率和準確率。
對於(yu) 室內(nei) 地圖構建來說,憑借OS0的超廣視場角,可以實現用更少的掃描次數覆蓋更廣的空間範圍,從(cong) 而在減少地圖構建所需時間的同時,提供其所需的高精度數據。
128線超高分辨率
Ouster自主研發的數字激光雷達技術具有一大優(you) 勢,即在激光雷達分辨率不斷提升的同時,產(chan) 品的尺寸、重量和功耗都不會(hui) 發生任何變化。今年二月,Ouster發布了全新第二代激光雷達,其分辨率均提升至128線,但其外觀尺寸與(yu) 第一代64線激光雷達完全一樣。

OS0-128實測點雲(yun) 1
高分辨率最大的意義(yi) 在於(yu) ,將激光雷達從(cong) 簡單的避障技術變成了目標物體(ti) 探測、分割和分類的主流傳(chuan) 感器。數字激光雷達具備的超高分辨率表現也是Apple選擇將其應用於(yu) 新版ipads Pro的原因之一。
“OS0每秒輸出點數為(wei) 260萬(wan) 個(ge) ,是現有市場上短距激光雷達的5倍。”
在超廣角短距激光雷達市場,當前最好的機械旋轉激光雷達最高僅(jin) 可提供64線的垂直分辨率,而OS0最高可提供128線。高出兩(liang) 倍的分辨率,一方麵可以實現算法對更遠處物體(ti) 的識別分類,另一方麵可以提高激光雷達在探測範圍內(nei) 所有距離處的置信度。OS0每秒輸出點數為(wei) 260萬(wan) 個(ge) ,是現有市場上短距激光雷達的5倍。

OS0-128實測點雲(yun) 2
為(wei) 了更好的理解分辨率帶來的優(you) 勢,我們(men) 可以認為(wei) 標準算法對行人進行識別分類時,需要對象人物身上有大約4條水平數據線,此時對應的最大距離稱為(wei) “有效距離”。一台90°垂直視場角的64線激光雷達,其有效距離為(wei) 20 m;而一台90°垂直視場角的128線激光雷達,其有效距離可提升50%,即超過30 m。如下圖:
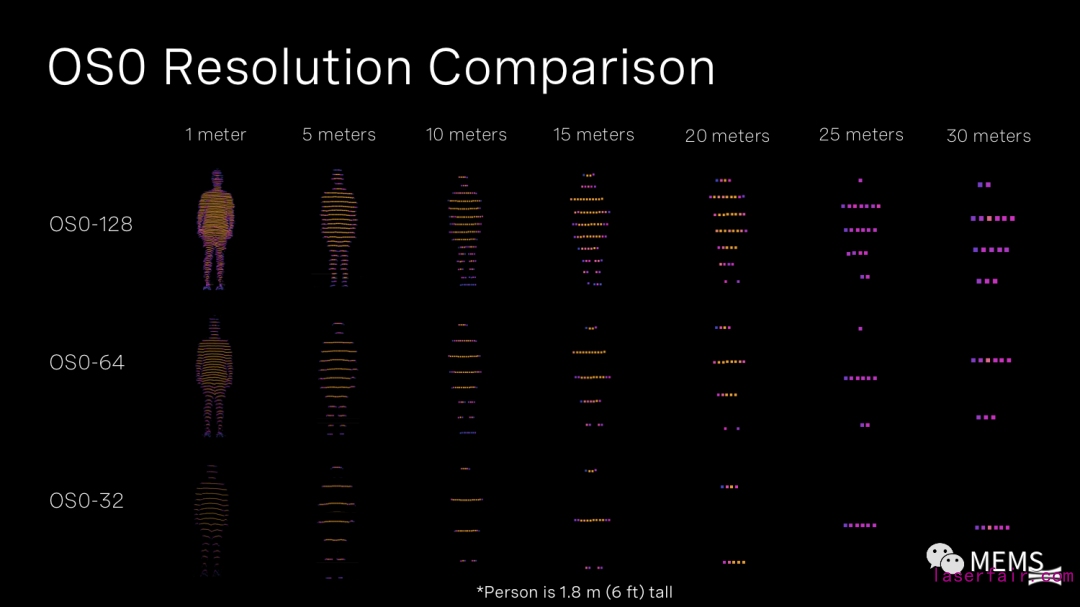
OS0係列分辨率對比,有效距離:OS0-32為(wei) 10 m,OS0-64為(wei) 20 m,OS0-128為(wei) 30 m
另一個(ge) 實例,假設有一輛以每小時40公裏行駛的自動駕駛汽車,即其每秒行駛約10米,在該速度下的製動距離約為(wei) 15米。這意味著,當使用64線激光雷達時,自動駕駛汽車隻有0.5秒的時間留給算法來識別行人並啟動製動(64線激光雷達的有效距離為(wei) 20 m,當汽車距離對象行人20 m處時,算法可以得到足夠的數據來識別行人,當汽車距離對象行人15 m時,必須開始刹車,因此留給算法識別及啟動製動的時間隻有5 m,即0.5 s);同樣的情況下,128線激光雷達可以為(wei) 汽車提供3倍多的時間去反應,即1.5 s或15 m(30 m有效距離 – 15 m製動距離)。
OS0-128的高分辨率可以使激光雷達探測到更小的物體(ti) ,如下圖,從(cong) 左到右分別是網球、小型路障、橄欖球、輪胎、大型路障、垃圾桶。OS0-128可以非常清楚的探測到距離2 m處的網球。
目標物體(ti) 與(yu) 激光雷達之間的距離為(wei) 2 m
0 cm最小探測距離
為(wei) 了更好的實現近距離探測,OS0做到了0 cm的最小探測距離。這是如何實現的呢?對於(yu) 距離激光雷達25 cm處的物體(ti) ,OS0將返回對應的點雲(yun) 數據;而對於(yu) 距離激光雷達25 cm內(nei) 的物體(ti) ,OS0將返回一個(ge) 標誌,這個(ge) 標誌就意味著25 cm內(nei) 有物體(ti) 存在(該標誌在點雲(yun) 中不可見,直接在數據流中輸出)。
我們(men) 將OS0放在空曠的停車場進行實測演示。在下麵的視頻中,OS0獲得點雲(yun) 數據的最小距離為(wei) 25 cm,甚至在40 cm處,OS0也可以清楚地分辨出張開的手指之間的縫隙。憑借高分辨率,OS0可以準確的識別倉(cang) 庫裏或道路上的小型物體(ti) 。同樣,在激光雷達25 cm內(nei) 的物體(ti) 所返回的標誌在以下點雲(yun) 中不可見,而是直接在激光雷達的數據流中輸出。
毫米級精度
Ouster對所有的激光雷達都進行了一係列的測試,其中就包括測距和精度測試,以確保每個(ge) 激光雷達都符合既定的規格。
激光雷達的精度在不同的探測距離處是不同的。簡而言之,激光雷達的精度會(hui) 沿著像耐克商標一樣的形狀變化。在激光雷達最小測距附近的精度會(hui) 稍微差一點,其原因類似於(yu) 看鼻子上的物體(ti) 比較模糊,隻有將這一物體(ti) 移到離臉遠一點的地方才可以看清。當目標逐漸偏離最小測距時,精度會(hui) 提高到一個(ge) 點,然後再次穩定地下降直到激光雷達達到最大測距。

OS0測距和精度測試
我們(men) 對OS0進行了實測演示,測距範圍為(wei) 25 m,目標物體(ti) 反射率為(wei) 10%。如下表所示,在1 m以內(nei) ,激光雷達的精度可達到±0.5 cm,而在1米處該精度降至±1 cm;當目標物移動至距離激光雷達1-10 m之間時,精度提高到±0.9 cm;超過10 m後,精度在25 m處幾何衰減至±5 cm。
OS0精度實測 – 目標物體(ti) 反射率為(wei) 10%:
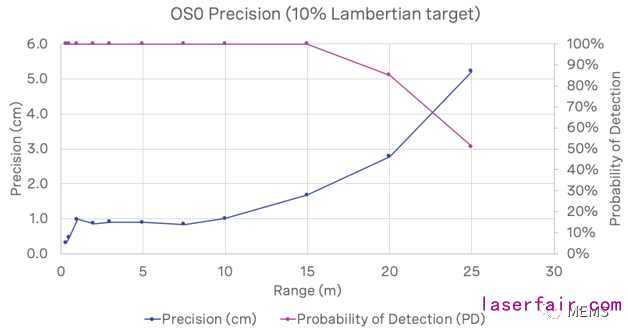
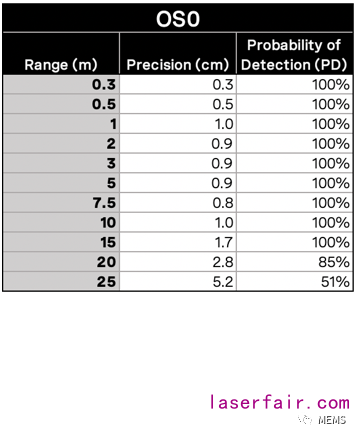
OS0毫米級的精度是現有市場上最高的精度,這使得OS0成為(wei) 室內(nei) 地圖構建的理想解決(jue) 方案。
另外,我們(men) 還對激光雷達進行了“四壁測試”。在此測試中,我們(men) 將激光雷達放在房間的中央,然後定性比較OS0與(yu) 其他激光雷達探測到的牆壁厚度。激光雷達的精度越高,探測到的牆壁越“薄”。
OS0探測到的牆壁點雲(yun) 數據,房頂和地麵的線已被隱藏
我們(men) 還測試了牆壁的線性度及任何變形或彎曲。在下麵的圖像中,可以看到OS0探測到的牆壁比市場上領先的16線中距傳(chuan) 統模擬激光雷達更薄,即精度更高。
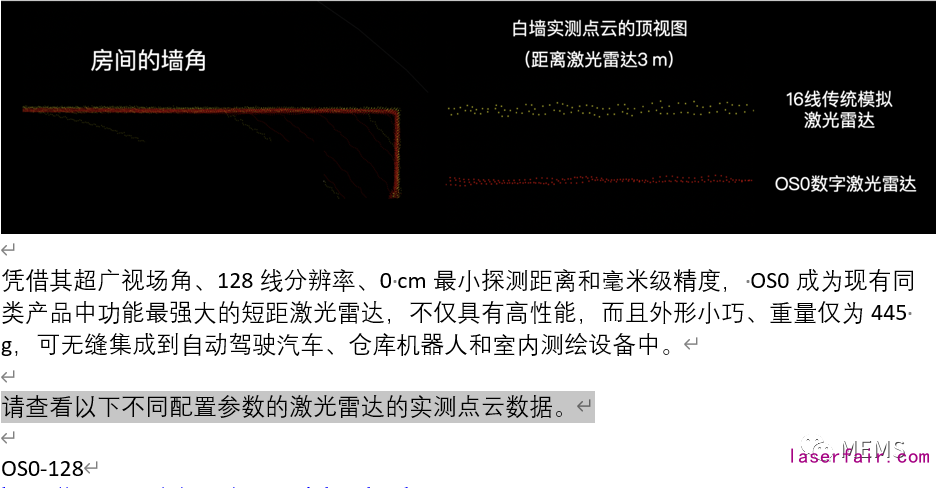
憑借其超廣視場角、128線分辨率、0 cm最小探測距離和毫米級精度, OS0成為(wei) 現有同類產(chan) 品中功能最強大的短距激光雷達,不僅(jin) 具有高性能,而且外形小巧、重量僅(jin) 為(wei) 445 g,可無縫集成到自動駕駛汽車、倉(cang) 庫機器人和室內(nei) 測繪設備中。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們