




在武漢大學珞珈山上,夜間常常有一束綠色的熒光射向蒼穹,與(yu) 周邊的建築交相輝映,成為(wei) 校園內(nei) 一道獨特的風景。這是武漢大學電子信息學院易帆教授牽頭的武漢大氣遙感國家野外科學觀測研究站在進行雷達夜間作業(ye) 。

珞珈山上的雷達站夜間工作圖
日前,由易帆主持的國家重大科研儀(yi) 器設備研製項目“快速精準測量0-35 km大氣溫度和氣溶膠的先進拉曼激光雷達”,通過國家自然科學基金委員會(hui) 組織的結題驗收並獲評優(you) 秀。
五年來,項目團隊成功研製出具備高時空分辨精準測量大氣溫度和氣溶膠的先進拉曼激光雷達係統。在15分/90米時空分辨率條件下,係統測溫統計誤差在18公裏以內(nei) 小於(yu) 1K,在35公裏以內(nei) 小於(yu) 2K,氣溶膠體(ti) 後向散射係數相對測量誤差在12公裏以內(nei) 小於(yu) 5%,為(wei) 從(cong) 近地表到低平流層的大氣結構和動力學研究等提供了有力支撐。
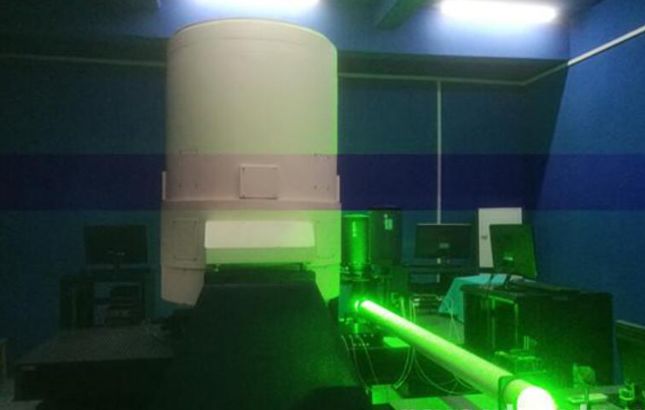
先進拉曼激光雷達現場工作圖
易帆團隊長期以來致力於(yu) 激光雷達遙感探測技術的發展,獲得了國家自然科學基金傑出青年科學基金和創新研究群體(ti) 項目支持。團隊依托武漢大學遙感國家野外科學觀測研究站的優(you) 勢資源和力量,開展了卓有成效的研究,並取得了大量原創性科研成果。團隊成果“建成亞(ya) 洲功能最強大的中高層大氣激光雷達綜合探測平台”,曾入選《科技導報》中國年度十大重大科學、技術和工程進展。
什麽(me) 是激光雷達係統
激光雷達(Light Detection And Ranging,LiDAR),是一種可以安裝在不同遙感平台上的激光探測、測距和定位係統。它集激光測距、慣性測量、高精度定位等技術於(yu) 一體(ti) ,通過記錄單個(ge) 激光信號從(cong) 發射到接收被地物反射的能量所曆經的時間,並根據信號發出瞬間由定位定姿係統(POS)測定的激光掃描係統的位置和姿態,可以計算出地物目標的三維坐標,並繪製地形圖。

機載激光雷達成像原理示意圖
與(yu) 常規攝影測量和遙感技術相比,利用激光雷達技術進行遙感數據獲取具有采集速度快、自動化程度高、受天氣影響小、數據生產(chan) 周期短、幾何精度高等特點,是獲取高分辨率三維地球空間信息的一種新的技術手段。
激光雷達遙感作業(ye) 時采用的搭載平台包括地麵、車載、機載、船載、星載等多種遙感平台。其中,商業(ye) 化的激光雷達係統以地麵、車載及機載平台為(wei) 主。其中的有人機載平台包括大型固定翼飛機及直升機平台,無人機載平台包括固定翼無人機、無人直升機、多旋翼無人機等。
以機載、車載激光雷達係統為(wei) 例,典型的係統一般由以下主要部件組成:一套高精度定位定姿係統(POS),主要包括一個(ge) 用於(yu) 確定掃描投影中心的空間位置的動態差分GNSS接收機,以及一個(ge) 用於(yu) 高精度傳(chuan) 感器空間姿態參數測量的慣性測量單元(IMU);激光掃描測距係統,用於(yu) 測量傳(chuan) 感器到地麵點的距離;一套成像裝置(主要是數碼相機),用於(yu) 獲取對應地麵的彩色數碼影像,用於(yu) 最終製作正射影像;一個(ge) 控製與(yu) 存儲(chu) 係統,用於(yu) 控製激光掃描測距係統、GPS、IMU以及成像裝置工作並存儲(chu) 獲取的數據;一個(ge) 操作終端,用於(yu) 作業(ye) 員對設備進行操作及狀態監控;配套數據處理軟件,如POS數據處理軟件、點雲(yun) 生成軟件等。
作業(ye) 時,根據激光掃描儀(yi) 測量的回波角度、距離,結合慣性測量單元(IMU)與(yu) 差分GNSS測量的空間位置和姿態以及它們(men) 之間的幾何位置關(guan) 係,經過幾何後處理可直接獲取目標物的高密度三維點雲(yun) 空間位置信息,如圖所示。
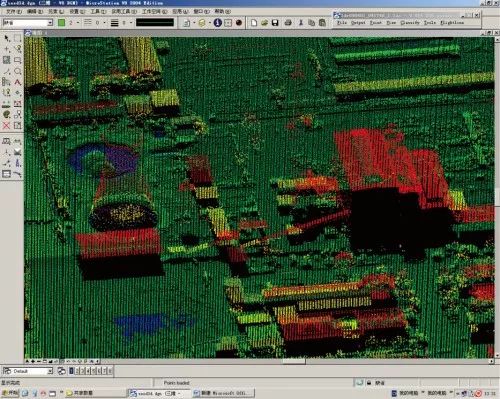
利用機載激光雷達獲取的激光點雲(yun)
由於(yu) 一般的機載激光雷達係統都搭載有航空數碼成像係統進行緊密集成,可以無需地麵控製點直接獲取地麵點三維坐標並快速生成正射影像、建立區域三維表麵模型或實體(ti) 三維模型。獲得數據成果除可以應用於(yu) 測繪生產(chan) 外,還可以廣泛應用於(yu) 鐵路、交通、電力、林業(ye) 、水利、海洋、地質、公安、石油等部門。
激光雷達技術的發展曆程
激光雷達技術最早起源於(yu) 20世紀60年代初期,主要用於(yu) 氣象研究中雲(yun) 的測量。1971年,美國宇航局使用阿波羅15號飛船上搭載的激光高度計進行了月球製圖,隨後受到廣泛關(guan) 注。20世紀70年代中期開始,美國等國先後試驗成功了用於(yu) 深海測深和水道測量的機載激光測距係統。20世紀80年代末,GPS定位技術的成功應用使得機載激光斷麵測量係統開始在一定範圍內(nei) 應用。20世紀90年代初,隨著高精度GPS定位技術以及慣性導航技術(INS)的發展,為(wei) 從(cong) 空中直接、快速獲取大範圍地麵目標的三維位置奠定了技術基礎,並使得機載斷麵測量係統開始被激光掃描係統代替。機載激光掃描係統最早於(yu) 1992年秋開始在美國實驗室有研製的樣機,其後看到試驗成果。1996年國際攝影測量遙感學會(hui) (ISPRS)維也納國際會(hui) 議開始有一家機載激光掃描係統廠商參展,後來又有更多的廠商及更多的服務提供商進入機載激光掃描係統研究領域。目前國際上激光掃描係統主要廠商有Leica GeoSystems、Riegl、Optech、TopoSys、Trimble等。我國的中國科學院遙感應用研究所於(yu) 20世紀90年代末在國家863計劃支持下研製了中國機載激光三維成像儀(yi) ,並成功開展了應用試驗。2010年後,我國中科院光電院、北京北科天繪公司、北京四維遠見公司等相關(guan) 研究單位和公司推出了商用化的機載激光掃描係統、車載激光掃描係統,實現了激光掃描設備的國產(chan) 化。
目前,隨著傳(chuan) 統行業(ye) 對高精度地形地物測繪需求的擴大,以及無人機、無人車以及室內(nei) 導航與(yu) 位置服務等新型應用的興(xing) 起,國內(nei) 激光雷達技術應用正在進入蓬勃發展的新時代。同時,隨著激光雷達器件的技術進步,激光雷達係統在性能得到提升的同時,傳(chuan) 感器也越來越小型化。以機載激光雷達係統為(wei) 例,從(cong) 原來的上百公斤的大型係統,到目前流行的10-30公斤的便攜式小型係統。近年來,已經出現了可搭載於(yu) 多旋翼無人機的2公斤左右重量的近距離激光雷達係統。
激光雷達技術還存在的問題
盡管近兩(liang) 年來激光雷達技術及其應用已得到蓬勃發展,但其在發展過程仍然存在一些待解決(jue) 的問題,需要在今後的發展過程中進一步完善。
首先,激光雷達設備成本較高,規模化、批量化生產(chan) 能力較弱。目前激光雷達係統設備的生產(chan) 加工往往為(wei) 按訂單生產(chan) 或小批量加工方式,自動化水平較低,生產(chan) 、裝配成本較高,導致其在相關(guan) 領域應用普及較慢,還不能滿足應用快速發展的需求。隨著技術的發展,激光成像器件將由掃描成像激光雷達向固態成像激光雷達發展,可望進一步降低生產(chan) 成本,實現大批量、規模化生產(chan) 。
其次,激光器性能和數據采集效率還有待進一步提升。隨著用戶對大區域高密度點雲(yun) 的需求持續擴大,需要在獲取高密度點雲(yun) 時保證較高的數據采集效率。然而,由於(yu) 激光衍射極限限製,目前激光器探測能力已經逐漸逼近探測極限。因此,改進探測器的性能成為(wei) 當務之急。單光子/量子成像激光雷達將成為(wei) 未來激光雷達未來發展的重要方向。譬如,美國出現的蓋格模式激光雷達,可在數萬(wan) 米高空獲取每平米幾十個(ge) 點的高密度激光點雲(yun) ,可大大提高點雲(yun) 獲取的效率。
然後,高性能、低成本、小型化激光雷達係統需求迫切。大型激光雷達設備勢必需要搭載在大型平台上,機載雷達所需的大型無人機和有人機成本過高;同時,小型激光雷達係統受多旋翼無人機續航能力及自身性能限製,其作業(ye) 時間較短,數據采集效率不高;此外,無人駕駛汽車技術的發展對小型化、低成本激光雷達的需求提出了更高的要求。這些需求成為(wei) 推動激光雷達設備進一步小型化的動力。
在數據後處理軟件的成熟度方麵,當前點雲(yun) 數據處理還處在發展完善階段,尤其是麵向終端用戶滿足行業(ye) 應用需求的定製化軟件還處在不斷發展完善中。
激光雷達技術的典型應用
利用獲取的激光點雲(yun) ,通過去除部分噪聲點並進行柵格化,可以快速生成高質量的數字表麵模型(DSM)。同時,如利用自動化方法結合人工編輯對激光點雲(yun) 進行進一步的濾波操作,濾除其中的非地麵點並進行柵格化,可以得到高質量的數字地形模型(DEM)。
機載激光雷達係統獲取的高精度激光點雲(yun) 和地形三維模型,可以為(wei) 勘察設計提供斷麵量測、坡度坡向量測、土方填挖量等信息,大大減少工程勘察設計中的外業(ye) 工作量,縮短工作周期。
利用機載雙波段激光雷達水深測量係統,可對水質較好區域的淺海海底地形進行精確測量,獲取高精度海岸帶及淺海海底地形數據,用於(yu) 海岸帶、灘塗防護及航道開發等應用。隨著我國對海島、海洋的開發和權益保護越來越重視,該方麵應用具有較大的發展潛力。
利用激光同步定位於(yu) 建圖技術開發的推車或背包係統,可對室內(nei) 進行便捷的三維成像,快速獲取室內(nei) 高精度激光點雲(yun) 模型,結合可見光相機成像,可快速形成可量測的室內(nei) 街景及真三維模型,在室內(nei) 導航與(yu) 室內(nei) 位置服務方麵具有廣泛的應用前景。
利用激光雷達技術可以獲取道路及兩(liang) 側(ce) 一定範圍內(nei) 的高精度三維數據,可用於(yu) 製作無人駕駛汽車用的高精度導航地圖,準確標識車道位置及交通指示標誌。同時,由於(yu) 激光雷達具有全天時、全天候的測距能力,測量精度和測距能力受光照、氣象、霧霾等條件影響較小,測距方向性和穩定性好,即便是惡劣的天氣條件也能夠正常工作。目前,激光雷達已成為(wei) 無人駕駛技術中必不可少的“電子眼”,可以大大提高無人駕駛車輛的環境感知、智能決(jue) 策以及車輛控製能力,成為(wei) 無人駕駛汽車安全行駛的重要保障。
展望未來5-10年,激光雷達將迎來更加快速發展的新時期,激光雷達技術也將不再是一門少數專(zhuan) 業(ye) 用戶使用的技術,而將成為(wei) 走進千家萬(wan) 戶,與(yu) 我們(men) 生活息息相關(guan) 的一門大眾(zhong) 化技術。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們