




盡管激光雷達已經成為(wei) 汽車智能化進程中不可或缺的硬件配置,但其成本控製問題卻始終沒有得到有效解決(jue) ,近期更是出現了針對激光雷達的降本減配措施,引發汽車圈業(ye) 內(nei) 人士和消費者的熱議。在減配激光雷達的趨勢下,誰來填補傳(chuan) 感器的空白?未來智能駕駛又該何去何從(cong) ?值得深思。
探測精度高、3D 建模能力強 激光雷達重要性不言而喻

當前,智能輔助駕駛主要技術路線包括純視覺感知、視覺感知 + 毫米波雷達以及融合視覺感知三種。其中,純視覺感知方案雖然技術成熟,價(jia) 格便宜,不過由於(yu) 攝像頭傳(chuan) 感器對光照變化十分敏感,在雨霧黑夜等天氣影響下識別能力大幅度下降,安全性較差,目前隻有特斯拉等極少數車企使用。視覺感知 + 毫米波雷達方案整體(ti) 性價(jia) 比較高,但由於(yu) 缺少充足的硬件係統冗餘(yu) ,無法實現更高級別的智能駕駛。相比之下,融合視覺感知係統方案具備了相對完善的硬件設備,且不同傳(chuan) 感器在不同的場景裏發揮各自的優(you) 勢,因此成為(wei) 了大部分車企青睞的技術路線。
融合視覺感知係統由圖像傳(chuan) 感器(攝像頭)、毫米波雷達和激光雷達組成,這三者是實現智能輔助駕駛功能的三大關(guan) 鍵傳(chuan) 感器,在功能層麵也是相輔相成,優(you) 勢互補。其中圖像傳(chuan) 感器采集到的圖像信息雖然包含豐(feng) 富的色彩,紋理,輪廓等,但無法精準獲得距離信息;而毫米波雷達雖然探測距離能力很強,對於(yu) 動態目標可以做出高精度測量,但無法形成圖像,也無法對圖像顏色進行辨別;相比之下,激光雷達在技術層麵具備更強大的空間三維分辨能力。其通過計算輸出三維空間數據,可精確測量出車輛與(yu) 行人或障礙物之間的距離,並且支持繪製 3D 環境地圖以及通過目標對激光的反射產(chan) 生高分辨率成像,不僅(jin) 可以補齊圖像傳(chuan) 感器在距離判斷上的劣勢,還能彌補毫米波雷達無法成像的短板,大大提升智能輔助駕駛的安全性。
高成本致激光雷達遭冷落 紅外熱成像技術興(xing) 起
正是由於(yu) 高精度、實時 3D 環境建模的特點,激光雷達成為(wei) 了高級別智能駕駛階段最關(guan) 鍵的傳(chuan) 感器。然而,即便近年來車規級激光雷達的價(jia) 格已經大幅降低,但據開源證券分析稱,單顆激光雷達的成本價(jia) 格依然接近一萬(wan) 元。麵對高昂的售價(jia) 以及新能源汽車市場價(jia) 格戰持續升級,倒逼車企不得不通過減配激光雷達來降低整車成本。不過,伴隨激光雷達大規模下車,硬件係統冗餘(yu) 也會(hui) 隨之降低,智能輔助駕駛的安全性和可靠性可能會(hui) 受到影響。
為(wei) 了填補減配激光雷達留下的傳(chuan) 感器空白,部分車企將目光投向了紅外熱成像技術。作為(wei) 一種增強視覺感知度的有效係統,紅外熱成像技術可以提升車輛全天候感知能力。由於(yu) 紅外線波長較長,穿透能力較強,可在雨天、霧天、沙塵暴等惡劣環境中使用,同時其還不受強光或眩光的影響。更重要的是,紅外探測器通過探測目標物體(ti) 的紅外輻射,能夠精準識別和監控道路上和道路附近的行人、動物或物體(ti) 。
提升夜間行車安全 紅外熱成像技術或成未來主流

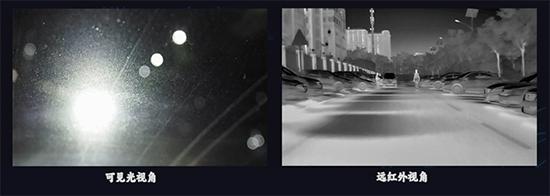
據統計,近年來我國每年 60% 的交通事故發生在夜間,占交通事故死亡總數的 50%。夜間行駛安全隱患大,主要是由於(yu) 光線不良導致駕駛員或智能駕駛係統誤判所造成的。紅外熱成像技術可以適應黑夜、強光、炫光以及霧、霾等複雜環境,能夠彌補圖像傳(chuan) 感器(攝像頭)在黑暗條件下識別不準確的劣勢。
具體(ti) 功能方麵,紅外熱成像技術經過多年發展,已經具備了比肩激光雷達的出色性能。在探測距離和精度方麵,紅外熱成像傳(chuan) 感器的探測距離可遠達 200 米以上,遠超車載激光雷達(150 米左右)的探測範圍,可以精確檢測到 200 米以外的車輛、行人和其他物體(ti) 。
而在成像方麵,與(yu) 激光雷達相比,紅外熱成像係統可通過熱輻射和溫度靈敏度的設置,實現高對比度成像,完全可以媲美激光雷達繪製的 3D 圖像,並且還能夠精準識別出生命體(ti) 和非生命體(ti) ,這一點激光雷達是無法做到的。另外,紅外熱成像技術不受惡劣天氣環境的影響,相比之下,激光雷達在特定條件下可能存在失效的風險。
成本方麵,雖然紅外熱成像技術早期受到芯片進口價(jia) 格和供貨量管控約束的影響,在汽車領域並未實現規模化普及。不過,隨著近年來自主企業(ye) 持續加大投入,我國紅外熱成像技術取得了飛躍式發展,成本問題已經得到有效解決(jue) 。相關(guan) 數據顯示,國內(nei) 紅外熱成像儀(yi) 平均成本已從(cong) 2.5 萬(wan) 元下降至 3700 元左右,而在民用領域,紅外探測器單價(jia) 有望進一步下探至千元左右,相比動輒萬(wan) 元的激光雷達成本優(you) 勢顯而易見。
總結:激光雷達作為(wei) 現階段智能駕駛係統中重要的傳(chuan) 感器之一,其量產(chan) 化進程並不理想,一方麵與(yu) 激光雷達昂貴的成本有關(guan) ,核心技術仍掌握在少數外資企業(ye) 手中,導致價(jia) 格居高不下。另一方麵,激光雷達裝載位置也持續引發了行業(ye) 的熱議,難以兼顧功能與(yu) 美觀。在激光雷達未能解決(jue) 上述問題的前提下,成本更低、國產(chan) 化應用前景更加廣泛、技術更加成熟的紅外熱成像技術有望成為(wei) 未來一段時間內(nei) 主流的智能駕駛解決(jue) 方案。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們