




摘 要:本文介紹了連續變焦光學係統的基本工作原理以及光學設計方法的全過程。其中包括變焦和補償(chang) 方案的選擇、高斯光學各組元焦距分配、外形尺寸計算、初級像差平衡、PW求解、初始結構參數確定、係統實際像差自動平衡,直到凸輪曲線優(you) 化設計等。文章以圖形和公式說理,用OCAD光學自動設計軟件為(wei) 工具,全麵介紹三組元連續變焦係統的設計方法及過程。 關(guan) 鍵詞 變焦係統 機械補償(chang) 像差平衡 凸輪優(you) 化設計 OCAD光學設計程序
一、 連續變焦光學係統的基本工作原理 在日常生活或軍(jun) 事觀察中有時會(hui) 想在一定圖象畫麵內(nei) 了解較大範圍的目標全貌,有時又需要在一個(ge) 較小範圍內(nei) 觀察目標圖象的具體(ti) 細節。從(cong) 光學設計的角度說,就是要求一個(ge) 光學係統在像高大小不變時,可以改變物麵尺寸大小。由光學係統能量守衡定律,拉氏不變量
![]()
可以看出,對同一個(ge) 光學係統,無論在物方還是像方甚至中間任意一個(ge) 光學表麵都要遵循這個(ge) 拉氏變量J不變的原則。對於(yu) 照相(望遠)物鏡而言,上式可以寫(xie) 成
![]()
的形式。又由於(yu) 光學係統的焦距計算公式為(wei)

這樣又有關(guan) 係式

這就意味著要改變物方視場就必須通過改變係統焦距來實現。這就是可變焦距光學係統的由來。一個(ge) 光學係統影響其焦距變化的因素也很簡單,因為(wei) 係統焦距隻是組成該係統的各表麵的表麵半徑(曲率)、間隔以及其光學材料的折射率的函數,即

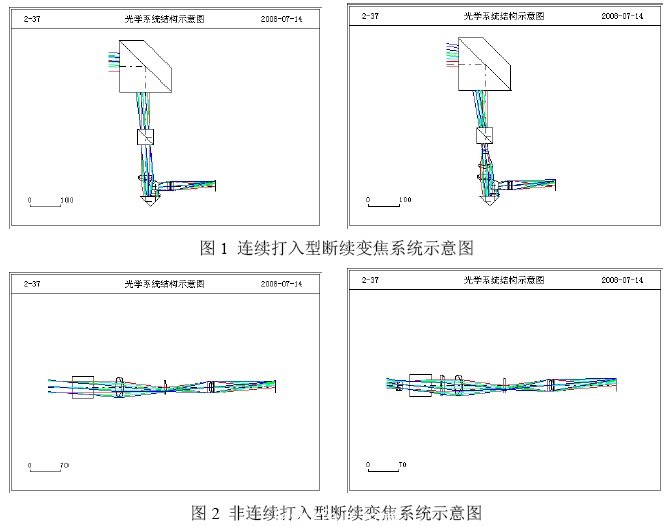
為(wei) 此,要改變光學係統焦距必須通過改變組成係統的表麵半徑(曲率)、間隔以及其光學材料的折射率來實現。為(wei) 了實現光學係統變焦,最古老的也是最有效的方法就是提高改換光學係統內(nei) 部分光學零件來實現。比如對一個(ge) 顯微係統,可以更換不同焦距的顯微物鏡或不同焦距的目鏡實現。因為(wei) 這樣有限數量的整組物鏡或目鏡的更換,對一個(ge) 顯微鏡而言,其放大倍率的改變自然也是有限的和不連續的。還有一種是不改變光學係統內(nei) 光學零件,也就是不改變光學係統的各表麵半徑和材料折射率,而僅(jin) 是通過改變各光學零件之間的空氣間隔,即改變參數d改變係統焦距,這樣就可以連續無間斷地獲得一個(ge) 變焦光學係統。為(wei) 此變焦光學係統就分為(wei) 兩(liang) 大類。前者被稱作斷續變焦光學係統,後者叫做連續變焦係統。 斷續變焦係統還可以分成幾種不同類型,比如通過打入(出)一組或多組光學零(部)件實現係統兩(liang) 個(ge) 不同焦距變化的變焦的光學係統被稱做打入型斷續變焦係統;
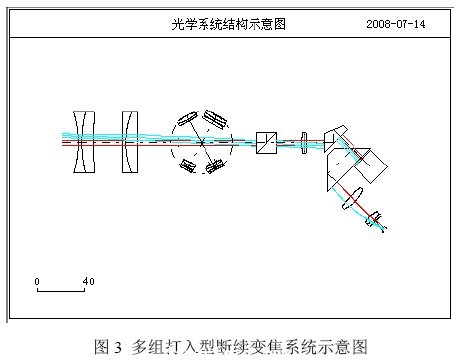
可以分多組以不同順序多次打入(出)不同光學光學零(部)件,每打入(出)一組光學零(部)件就可以獲得一次不同係統焦距變化的變焦係統,被稱做多組打入型斷續變焦係統。
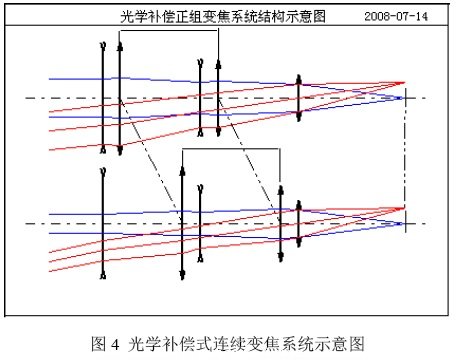
還有一種是通過光學係統內(nei) 部分光學零(部)件沿光軸方向移動,改變光學間隔以實現係統焦距變化,但在移動過程中隻能在幾個(ge) 特定位置上保持係統像麵大小和位置不變切成像質量滿足要求的變焦係統被稱做改變間隔型斷續變焦係統,無論那種斷續變焦係統,在其變焦過程中都要求係統像麵大小幾像麵位置不變,而且還要求在變焦過程中係統成像質量滿足使用要求。 連續變焦係統同樣也可以分成幾種不同類型的變焦係統。比如把光學係統內(nei) 一部分光學零(部)件保持位置不變,另一部分相對固連在一起和位置不動的部分分別相間沿光軸方向移動實現係統焦距連續可變的係統被稱為(wei) 光學補償(chang) 式連續變焦係統。
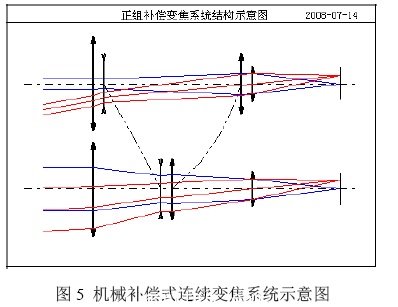
如果把一個(ge) 變焦係統的可沿光軸方向移動的組分分成兩(liang) 組,各自按不同的運動規律移動的變焦係統被叫做機械補償(chang) 式連續變焦係統,
如果變焦組或補償(chang) 組本身不是一個(ge) 獨立組分,期間還和係統固定部分相間排列的變焦係統,有叫做雙組聯動型連續變焦係統。
二、 打入型斷續變焦光學係統的設計方法
三、 光學補償(chang) 式連續變焦光學係統設計方法
四、 機械補償(chang) 式三組元連續變焦光學係統的基本工作原理
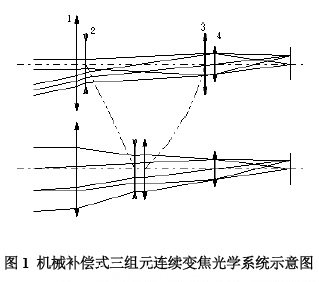
對成像係統,采用連續變焦光學係統是解決(jue) 大視場搜索觀察小視場分辨的最佳途徑。由交替固定和相對活動的透鏡或透鏡組組成的光學係統就是連續變焦光學係統[1]。係統的最前一個(ge) 透鏡或透鏡組和最後一個(ge) 透鏡或透鏡組都可以是固定的或是活動的。變焦係統的最後一個(ge) 活動組前麵的所有固定組和活動組的總數被稱為(wei) 變焦係統的組分數或組元數。變焦係統中所有活動組分固連在一起沿光軸方向做直線運動的係統稱作光學補償(chang) 式變焦係統。由一部分活動組的運動補償(chang) 因另一部分活動組的運動產(chan) 生的係統像麵位移的變焦係統稱作機械補償(chang) 式變焦係統。其中為(wei) 完成係統焦距變化的活動組份叫變焦組,用來補償(chang) 因變焦組的運動產(chan) 生的像麵位移的活動組分叫補償(chang) 組。在利用物象交換原則進行變焦,用往複式運動的補償(chang) 方式的變焦係統,有著明顯的變焦組和補償(chang) 組的分工,但利用物象交換原則進行變焦,用換根原則單調方向運動的補償(chang) 方式的變焦係統已沒有嚴(yan) 格的變焦組和補償(chang) 組之分了,因為(wei) 此類變焦係統的兩(liang) 個(ge) 活動組分的變焦貢獻相差不大,隻是習(xi) 慣上稱呼前麵的活動組為(wei) 變焦組,後麵的活動組為(wei) 補償(chang) 組。係統的最後一個(ge) 活動組前麵的所有組分也被叫做係統的變焦部分,主要負責完成係統的焦距連續變化,並保持係統像差的穩定不變。後固定組也叫固定部分,他對係統變焦沒有貢獻,主要負責把整個(ge) 係統成像質量達到最佳狀態,當然後固定組還可以調整係統的後工作距離和光學筒長的作用。 機械補償(chang) 式三組元連續變焦光學係統就是由一個(ge) 前固定組、一個(ge) 變焦組和一個(ge) 補償(chang) 組組成的光學係統。機械補償(chang) 式三組元連續變焦光學係統還可以有一個(ge) 後固定組,如圖1。該係統中透鏡組1為(wei) 前固定組,透鏡組2為(wei) 變焦組,透鏡組3為(wei) 補償(chang) 組,透鏡組4為(wei) 後固定組。前固定組的焦距值直接影響著係統的總體(ti) 焦距大小,變焦組和補償(chang) 組的相對位置的變化決(jue) 定係統的焦距變化倍率,即變焦比。補償(chang) 組的焦距為(wei) 正值的變焦係統叫做正組補償(chang) 係統,補償(chang) 組的焦距為(wei) 負值的變焦係統為(wei) 負組補償(chang) 係統。由於(yu) 該類變焦係統結構簡單,便於(yu) 設計,其應用麵也最廣。本文著重論述機械補償(chang) 式三組元連續變焦光學係統從(cong) 理想光學的高斯計算、初級像差平衡、係統像差優(you) 化方法直到凸輪曲線的優(you) 化設計。#p#分頁標題#e#
1.1 對機械補償(chang) 式三組元連續變焦光學係統的特點及基本要求
對機械補償(chang) 式三組元連續變焦光學係統,必須滿足以下要求
1) 均勻改變焦距 係統變焦必須在規定範圍內(nei) 連續變化。係統焦距變化範圍可以用係統的最小焦距值和最大焦距值,或者用給定最小焦距值和變焦比規定。
2) 係統的相對孔徑基本保持不變 由於(yu) 係統的相對孔徑表征著像麵的照度,為(wei) 保證在變焦過程中像麵照度不變,必須保持係統相對孔徑穩定不變。變焦係統的孔徑光欄一般設在後固定組的位置,因為(wei) 孔徑光欄在固定組上可以保證係統像麵總照度維持不變。如果係統孔徑光欄不在固定組上,必須要求該孔徑光欄隨係統變焦而隨時調整光欄位置和大小,確保係統像麵總照度維持不變。
3) 變焦過程像麵保持穩定 在變焦過程中像麵保持穩定有兩(liang) 個(ge) 含義(yi) ,一是保持像麵位置穩定,二是要求隨著係統焦距的變化係統像麵尺寸保持穩定。
4) 成像質量符合要求 連續變焦係統和定焦距係統對成像質量的要求不同,不僅(jin) 要求某個(ge) 變焦位置的成像質量最佳,還要求所有各變焦位置的成像質量穩定一致。
1.2 變焦組在變焦過程中的像麵位移分析
機械補償(chang) 式三組元連續變焦光學係統中,變焦組在變焦過程中由於(yu) 其物象共軛距離的變化不斷產(chan) 生像麵位移。變焦組在變焦過程中沿光軸方向可以是勻速直線運動,也可以任意曲線方程規律作非勻速運動。圖2給出了正組變焦組在變焦過程中勻速直線運動時產(chan) 生像麵位移的光學係統示意圖,圖中用虛線
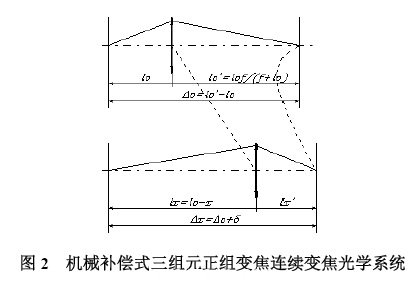
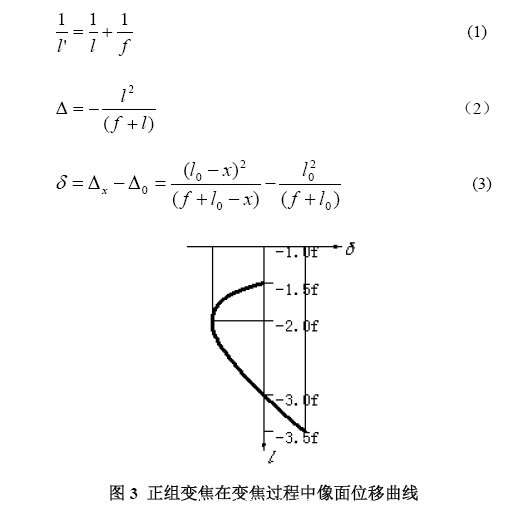
表示了變焦組勻速直線運動軌跡和係統像麵位移曲線。根據高斯公式(1),不難得出物象共軛距離Δ的表達式(2)以及變焦組移動距離x所產(chan) 生像麵位移δ的表達式(3),並由此兩(liang) 公式繪出正組變焦在變焦過程中像麵位移曲線如圖3。圖中列出了正組變焦組在變焦過程中物距由![]() 移動到
移動到![]() 處像麵位移的曲線圖。
處像麵位移的曲線圖。
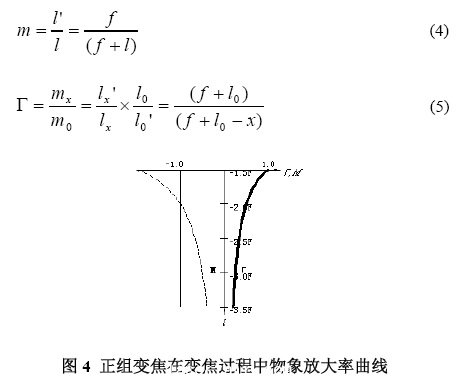
此外,根據以上公式還可以得出變焦組的物象放大率m和變焦比Γ的表達式如(4)和(5),同時繪出正組變焦在變焦過程中物象放大率曲線關(guan) 係如圖4。由圖4可以看出,在極值點![]() 處變焦組放大率
處變焦組放大率![]() 。變焦組放大率m和變焦比Γ隨物距的變化成二次曲線關(guan) 係。
。變焦組放大率m和變焦比Γ隨物距的變化成二次曲線關(guan) 係。
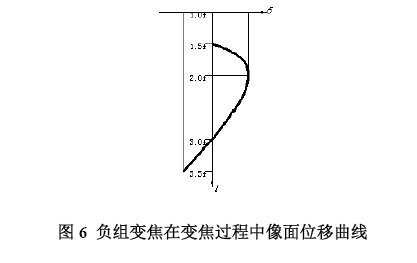
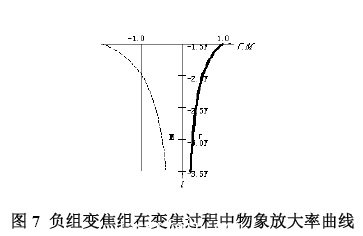
負組變焦組在變焦過程中勻速直線運動時產(chan) 生像麵位移的情況如圖5、圖6和圖7。
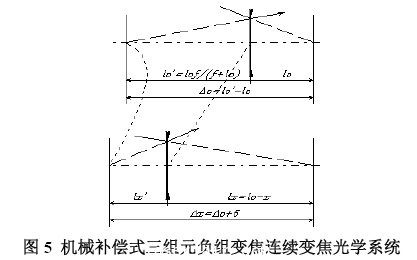
由以上計算公式及圖表分析對變焦組在機械補償(chang) 式三組元連續變焦光學係統中的作用可以歸納如下。
1) 變焦組在變焦過程中,保持物麵不動,變焦組緗對物麵沿光軸方向移動改變係統總焦距。
2) 變焦組在變焦過程中,因其物距變化引起像麵位移,像麵位移量在物距l=-2f處有極值,像麵位移曲線從(cong) 極值點向兩(liang) 邊延伸,並在l=-f和l=-∝處像麵位移趨向無窮大。像麵位移曲線在極值點前後變化速率不同。在極值點前(l=-f~-2f)速率較快,在極值點後(l=-2f~-∝)速率變化逐步緩慢。
3) 像麵位移量的大小,在變焦組的焦距值不變的前提下僅(jin) 和物麵位置(物距)有關(guan) 。
4) 像麵位移曲線是個(ge) 二次曲線,對應一個(ge) 像麵位移量有兩(liang) 個(ge) 不同的物距值,由於(yu) 這兩(liang) 個(ge) 不同的物距有相同的像麵位移量,或者說是有一個(ge) 相同的共軛距離,通常把這一對物像點叫做物像交換點。
5) 在像麵位移的極值點,物象放大率等於(yu) -1(m=-1),物麵在極值點和變焦組之間,物像放大率絕對值大於(yu) 1(abs(m)>1),在l=-f處m=∝;物麵位置在無窮遠和像麵位移極值點之間物像放大率絕對值小於(yu) 1(abs(m)<1)。在l=∝處m=0。
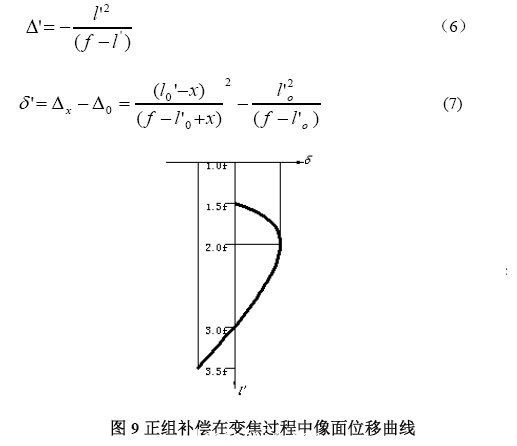
1.3 補償(chang) 組在變焦過程中的像麵位移分析
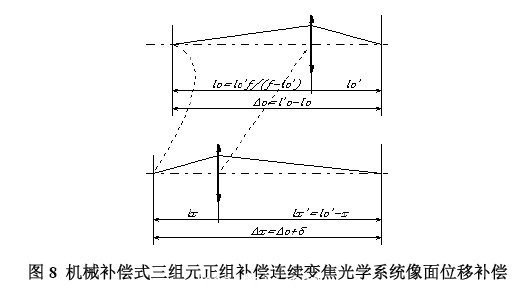
機械補償(chang) 式三組元連續變焦光學係統中的補償(chang) 組,在變焦過程中的作用就是以自身的物麵位移量吻合變焦組的像麵位移量,時刻保持係統像麵位置穩定。也就是在保持補償(chang) 組的像麵位置不變的前提下,軸向移動補償(chang) 組必然要求相應的物麵位移,當補償(chang) 組的物麵位移和變焦組的像麵位移完全吻合時,變焦係統的像麵保持穩定不變。機械補償(chang) 式三組元連續變焦光學係統補償(chang) 組在補償(chang) 過程中,為(wei) 補償(chang) 變焦組產(chan) 生的像麵位移,均以非均勻變化的非勻速運動形式相對係統像麵運動。圖8所示為(wei) 機械補償(chang) 式三組元正組補償(chang) 的補償(chang) 組相對係統像麵在作勻速直線運動示意圖。在圖8中,補償(chang) 組相對係統像麵變化,即隨像距'l的變化為(wei) 自變量。為(wei) 此,有公式(6)、(7)、(8)和(9),並由此公式組繪出圖形如圖9和圖10。
 #p#分頁標題#e#
#p#分頁標題#e#
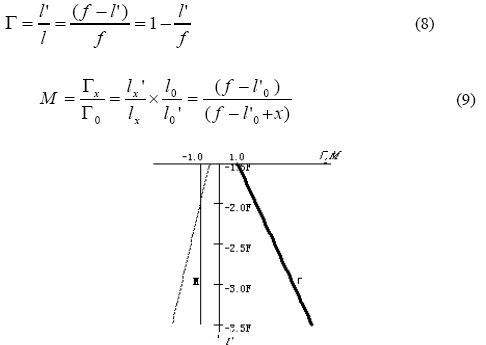
圖10 正組補償(chang) 在變焦過程中物象放大率曲線
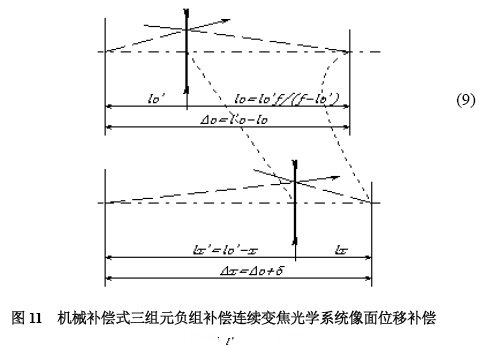
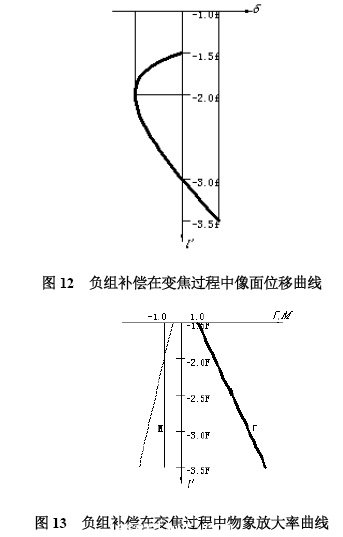
負組補償(chang) 的係統示意圖及其相應曲線如圖(11)、(12)和(13)。
由以上計算公式及圖表分析對補償(chang) 組在機械補償(chang) 式三組元連續補償(chang) 光學係統中的作用可以歸納如下。
1) 補償(chang) 組在補償(chang) 過程中,補償(chang) 組沿光軸方向移動產(chan) 生補償(chang) 組的像麵位置變化以補償(chang) 變焦組的像麵位移量,保持係統像麵不動。
2) 補償(chang) 組在補償(chang) 過程中,讓補償(chang) 組相對像麵使像距變化產(chan) 生物麵位移。物麵位移量在像距l‘=2f處有極值,物麵位移曲線從(cong) 極值點向兩(liang) 邊延伸,並在l’=f和l’=∝處物麵位移趨向無窮大。物麵位移曲線在極值點前後變化速率不同。在極值點前(l’=f~2f)速率較快,在極值點後(l’=2f~∝)速率變化逐步緩慢。
3) 物麵位移量的大小,在補償(chang) 組的焦距值不變的前提下僅(jin) 和像距有關(guan) 。
4) 物麵位移曲線是個(ge) 二次曲線,對應一個(ge) 物麵位移量有兩(liang) 個(ge) 不同的像距值,由於(yu) 這兩(liang) 個(ge) 不同的像距位置有相同的物麵位移量,或者說是有一個(ge) 相同的共軛距離,通常把這一對物像點叫做物像交換點。
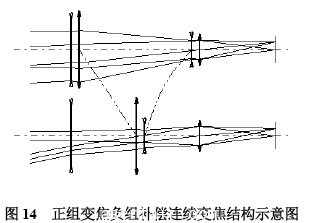
5) 補償(chang) 組的放大率m與(yu) 像距l’之間成線性關(guan) 係,當像麵在l’=2f處補償(chang) 組放大率等於(yu) -1(m=-1),當像距在無窮遠處,放大率為(wei) 無窮遠(m=∝),當像距l’=f時放大率等於(yu) 零(m=0)。 1.4 變焦組與(yu) 補償(chang) 組的搭配 機械補償(chang) 式三組元連續變焦係統的變焦部分是由變焦組和補償(chang) 組兩(liang) 個(ge) 活動組分組成的。無論變焦組和補償(chang) 組各自都可以是正組分或是負組分,它們(men) 之間也有相互(正負)搭配問題。由以上分析可以看出,正組—正組搭配或負組—負組搭配是由於(yu) 其變焦組的像麵位移曲線形狀和補償(chang) 組的物麵位移曲線形狀走勢相反,難以選擇物像交換及補償(chang) 曲線換根的原則,使得變焦速度偏慢,而正組—負組搭配和負組—正組搭配方式,其變焦組的像麵位移和補償(chang) 組的物麵位移曲線走勢剛好相同,容易選擇物像交換原則及補償(chang) 組曲線換根。實際上補償(chang) 組和變焦組沒有嚴(yan) 格分工,都可以負擔係統變焦比,不僅(jin) 使得係統變焦速度快,而且係統像差容易平衡。本文重點分析正組—負組搭配和負組—正組搭配兩(liang) 種形式。 1) 正組—負組搭配 采用正組變焦負組補償(chang) 的結構形式就是通常所稱的負組補償(chang) 結構形式,如圖14。該結構形式的特點在於(yu) 其變焦組的物麵在前,必須使用負光焦度的前固定組,這樣係統變焦部分的總焦距也必然是負值,為(wei) 了保證總焦距值為(wei) 正值,在係統後部還必須使用正光焦度的後固定組,而且後固定組的負擔也很重。負組補償(chang) 係統在變焦過程總焦距由長焦向短焦方向發展。
2) 負組—正組搭配
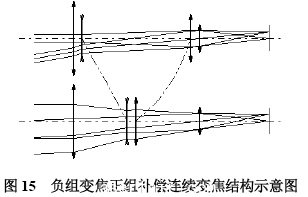
采用負組變焦正組補償(chang) 的結構形式叫正組補償(chang) 結構形式,如圖15。由於(yu) 正組補償(chang) 變焦係統使用正光焦度的前固定組,整個(ge) 變焦部分的光焦度為(wei) 正值,全係統可以不用後固定組。不過通常還是需要使用後固定組用以調整係統總焦距和工作距離,平衡係統像差。正組補償(chang) 係統在變焦過程總焦距由短焦向長焦方向發展。
1.5 變焦組的選擇
變焦組是變焦係統完成變焦功能的主要組成部分,是變焦部分的主動方。正由於(yu) 變焦組在變焦過程中產(chan) 生係統像麵位移,因此選擇哪一段作為(wei) 變焦範圍,選擇變焦組在變焦過程中的運動速度,是選擇變焦組的主要依據。
當變焦組在變焦起點位置和終點位置時的物距和像距剛好相互交換,該變焦組被稱為(wei) 物像交換原則的變焦組,此時變焦組產(chan) 生的像麵位移量最小,而且在兩(liang) 端的位移量等於(yu) 零。由於(yu) 像麵位移量最小,當然給補償(chang) 組的負擔也最小,整個(ge) 係統結構緊湊,易於(yu) 像差平衡。對於(yu) 非物像交換原則的變焦組,雖然不具備最小像麵位移優(you) 點,由圖4可以看出當變焦組物距l在abs(l)<2f範圍內(nei) 變焦速度最快,因此在abs(l)=2f附近,偏向abs(l)<2f一方選擇變焦組活動範圍有利於(yu) 提高變焦速度。
1.6 補償(chang) 組運動曲線的擬合
補償(chang) 組在機械補償(chang) 式三組元連續變焦光學係統中的首要作用就是用自己的軸向移動過程中產(chan) 生的物麵位移全過程的補償(chang) 變焦組在變焦過程中產(chan) 生的像麵位移量。但由於(yu) 變焦組和補償(chang) 組各自的光焦度和各自的移動範圍不同,他們(men) 各自產(chan) 生的像(物)麵位移的量和曲線規律都不同,不可能自然補償(chang) 。要在係統全過程內(nei) 精確補償(chang) ,必須人為(wei) 改變補償(chang) 組的運動規律(運動曲線)影響補償(chang) 組的物麵位移曲線形狀彌合變焦組的像麵位移曲線。這就是補償(chang) 組運動曲線的擬合。關(guan) 於(yu) 補償(chang) 組運動曲線的擬合方法的專(zhuan) 門論述一直是近數十年來不斷的話題。在參考文獻[2]和[3]中都有比較深刻地分析。概括起來,可以說補償(chang) 組為(wei) 了補償(chang) 係統像麵位移,唯一的辦法就是把自己的運動規律相對變焦組由線性同步運動改為(wei) 非線性的非同步運動,實質上就是改變自己的物麵位移形狀以擬合變焦組的像麵位移曲線形狀。通常補償(chang) 組的曲線擬合方式有以下幾種原則和方式。
1) 在物麵位移的極值點位置一側(ce) 做單方向運動
這種方法往往適用於(yu) 變焦組非物像交換原則的小變焦比的變焦係統。
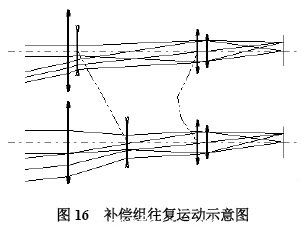
2) 以物麵位移的極值點位置為(wei) 轉折點往複運動方式 如圖16補償(chang) 組往複運動的優(you) 點是補償(chang) 組運動範圍小,係統結構緊湊,但從(cong) 圖4可以看出,補償(chang) 組在往複運動過程中,一段和變焦組作反向運動,另一段作同向運動。在做反向運動有利於(yu) 變焦速度,而同向運動必然減緩變焦速度,使得變焦過程加長,降低變焦效果。
當變焦組使用物像交換原則補償(chang) 組采用往複運動方式時,設補償(chang) 組在補償(chang) 運動前半段放大率為(wei) 2m,後半段為(wei) 2'm,係統的變焦比Γ和變焦組的放大率關(guan) 係為(wei) #p#分頁標題#e#

如果補償(chang) 組運動返回到原位置時

此時補償(chang) 組對係統變焦比沒有貢獻,係統的總變焦比為(wei)
![]()
隻有變焦組承擔全部變焦比的任務。
3) 在物麵位移的極值點位置處換根繼續原方向運動 補償(chang) 曲線的換根連續單方向運動如圖14和圖15,是推動連續變焦係統設計的重大發展[3]。也就是要求變焦組和補償(chang) 組共同在一個(ge) 位置具備放大率為(wei) 1的條件,或者說兩(liang) 條曲線都在極值點會(hui) 合,讓補償(chang) 曲線平穩過渡繼續單方向運動,此時補償(chang) 組終點位置和起點位置的放大率互為(wei) 倒數,即

表達式(9)變為(wei)

由此可見,這一方案既能加快變焦速度又能快速補償(chang) 像麵位移。當變焦組和補償(chang) 組均采用物像交換原則,並對補償(chang) 組使用換根原則時,實際上補償(chang) 組也起到了變焦比的貢獻,如果補償(chang) 組的焦距值接近變焦組的焦距值,此時係統總變焦比Γ為(wei)

係統的變焦比由變焦組和補償(chang) 組共同承擔,變焦組和補償(chang) 組也就沒有了明確的分工。
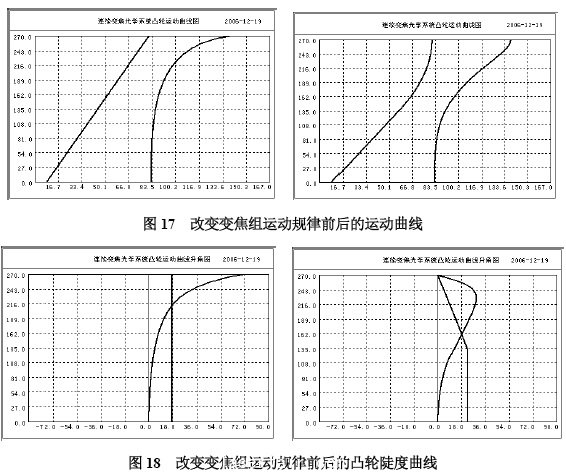
4) 改變變焦組運動規律改善補償(chang) 組補償(chang) 環境 補償(chang) 組用來補償(chang) 變焦組形成的像麵位移的能力也是有限的,特別對於(yu) 一些大變焦比係統,如果其變焦組與(yu) 補償(chang) 組的匹配方案不是很合理的情況下更顯突出。為(wei) 了緩解補償(chang) 組的補償(chang) 壓力,有時也不得不求助於(yu) 變焦組的努力。這就是改變變焦組運動規律改善補償(chang) 組補償(chang) 環境的方案。比如同一個(ge) 變焦係統,在改變成曲線運動規律後的變焦組和補償(chang) 組的運動曲線如圖17,他在改變了運動規律後凸輪曲線的陡度如圖18。由此可以清晰看出,改變前凸輪曲線最大陡度可達70°之多,造成凸輪運動卡死,簡直無法使用,而把變焦組的運動規律略加修改就可把凸輪曲線的最大陡度改善到30°以內(nei) ,明顯提高了變焦係統的運動性能。
2 高斯光學外形尺寸計算及初始結構參數確定
三組元連續變焦係統是可變間隔的機械補償(chang) 式連續變焦光學係統的一個(ge) 最有代表意義(yi) 的結構形式,其中按物像交換原則正組變焦負組補償(chang) 以及負組變焦正組補償(chang) 更是其中最具典型的結構形式。在三組元機械補償(chang) 式連續變焦係統設計過程中一旦設計方案確定之後緊接著就開始進行高斯光學的外形尺寸的計算。高斯光學外形尺寸計算的任務是進行係統中各組分光焦度的具體(ti) 分配和近軸光線幾何尺寸的計算以便完成初級像差的設計。
2.1 外形尺寸自動計算
在進行變焦係統高斯光學外形尺寸計算時會(hui) 因變焦方案的不同而有區別。利用物像交換原則和不用物像交換原則不同,使用補償(chang) 組曲線求解時換根和不換根不同,正組補償(chang) 和負組補償(chang) 的具體(ti) 計算方法也會(hui) 不同。此外,就是一個(ge) 變焦和補償(chang) 方案,因對係統的具體(ti) 要求不同其計算方法也會(hui) 有所不同,比如有些係統需要根據前固定組的要求進行設計,有的係統要根據後固定組的數據及後工作距離的要求進行設計。為(wei) 滿足這些要求,在可以自動進行變焦係統自動設計的OCAD光學設計程序中,就可滿足對正組補償(chang) 和負組補償(chang) 變焦係統的選擇要求,可以滿足根據前固定組求解和根據後固定組求解的不同選擇的要求。
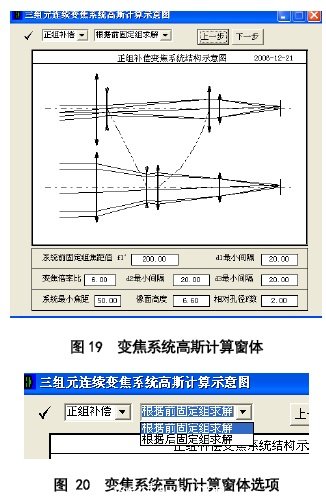
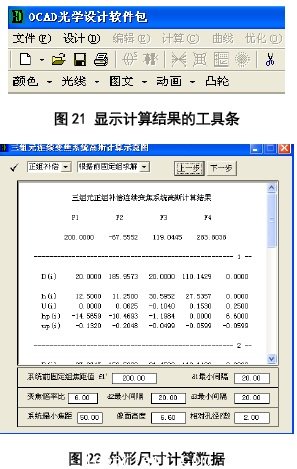
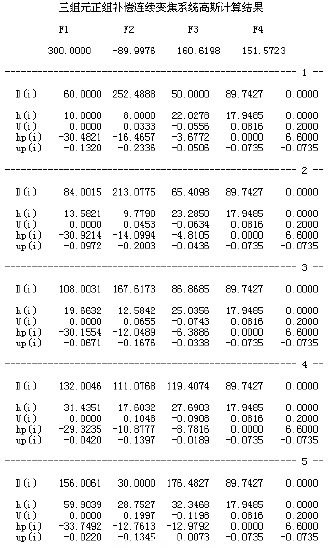
在OCAD光學設計程序的菜單中,在選擇“設計”菜單中的“變焦係統高斯計算”後,即可獲得三組元機械補償(chang) 式連續變焦係統高斯光學外形尺寸計算的功能界麵。在圖19的界麵上部有兩(liang) 個(ge) 可供選擇的下拉式文本框如圖20,其一是關(guan) 於(yu) 正組補償(chang) 或負組補償(chang) 的選擇框,其二是關(guan) 於(yu) 根據前固定組求解還是根據後固定組求解的選擇。如果選擇的是“根據前固定組求解”,該光學軟件在求解變焦係統時,可以根據已知前固定組的焦距值,並以此為(wei) 起點向後計算,確定變焦組參數,繼而計算係統補償(chang) 組參數及至後固定組的參數。如果 選擇“根據後固定組求解”的方式,則應由已知後固定組的參數包括後固定組的焦距值以及係統後工作距離的要求,繼而向前求取係統的補償(chang) 組參數,變焦組參數以及前固定組的參數。兩(liang) 種計算方式機動靈活,適應不同要求。 此外,為(wei) 完成自動計算變焦係統高斯光學外形尺寸,還必須給出係統的基本要求,如變焦比、係統最小焦距值(短焦焦距值)、各組分之間的最小間隔尺寸、係統相對孔徑以及係統視場範圍(物高)等數據,這些數據按窗體(ti) 內(nei) 的表格要求填寫(xie) 即可。以上數據填寫(xie) 完畢,程序會(hui) 自動計算出係統高斯光學外形尺寸數據,並自動繪出係統示意圖如圖19,同時還可以使用程序工具條中關(guan) 於(yu) “顏色” 、“光線” 、“圖文” 、“動畫”以及“凸輪”等工具,顯示內(nei) 容如圖21。如果選擇工具條中“圖文”就可以交替顯示外形尺寸的計算數據或係統示意圖,如圖19和圖22。在圖22中列出了各固定組及活動組的焦距值以及變焦係統
高斯計算後的各不同變焦位置的幾何尺寸,如組間隔d,軸上點及軸外點的入射高度h、hp和會(hui) 聚角u、up等。圖22中的完整數據見表1。 表1 三組元正組補償(chang) 連續變焦係統高斯計算結果#p#分頁標題#e#
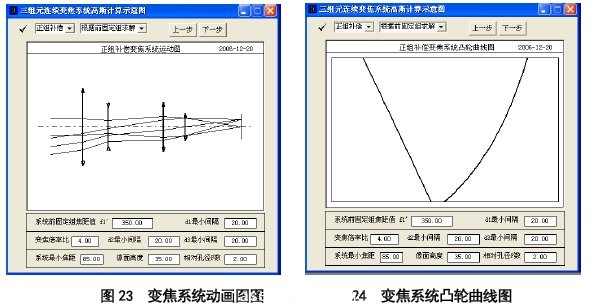
如果選擇“動畫”可以以動畫形式生動地顯示係統變焦過程如圖23。如果選擇“凸輪”就可以顯示該係統變焦組和補償(chang) 組的凸輪曲線圖如圖24。在OCAD光學設計程序內(nei) 顯示的圖形都是彩色圖形,有時為(wei) 了具體(ti) 需要可以任意修改圖形顏色的背景色或前景色,隻要選擇工具條內(nei) 的“顏色”即可實現。
2.2 初級像差係數自動平衡
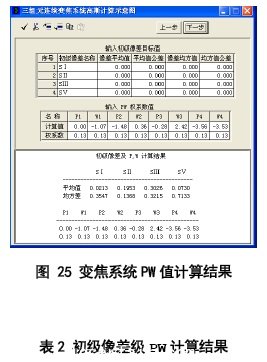
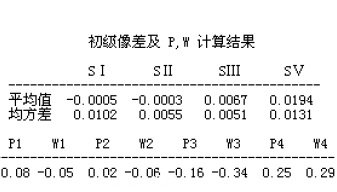
前麵求出了滿足像麵補償(chang) 以及焦距變化範圍等要求的焦距分配,接著便要考慮校正像差的問題。由於(yu) 變焦係統比較複雜,應把校正係統像差的工作分成兩(liang) 個(ge) 階段進行,也就是首先考慮係統初級像差的校正,然後再考慮初級像差和高級像差的平衡。當然這兩(liang) 個(ge) 階段也不能截然分割開來,比如在校正初級像差時還必須要考慮係統可能產(chan) 生的高級像差預留一部分初級像差等待和高級像差平衡。 連續變焦係統和定焦距係統的關(guan) 鍵不同還在於(yu) ,定焦距係統的所有鏡片和透鏡組的結構參數在使用中都是固定不變的,而連續變焦係統的各個(ge) 固定組和活動組之間間隔會(hui) 在變焦過程中不斷變化,其像差關(guan) 係也在不斷變化。因此,對變焦係統不僅(jin) 要考慮像差的最佳性同時還要考慮其像差的穩定性。為(wei) 了滿足變焦係統最佳性和穩定性的要求,為(wei) 簡化對係統像差的要求,可以把整個(ge) 變焦過程的所有像差集合起來求其平均值和其均方差表達像差的最佳性和穩定性指標。此外,在考慮係統初級像差的校正時要選取兩(liang) 個(ge) 中間參數P、W值(通常簡稱PW值)作為(wei) 求解係統結構參數的必要參數。因此求解PW值的過程就是根據校正初級像差求解係統結構參數的過程。在校正初級像差求解PW值的過程中,可以把在變焦過程中所有各像差係數的加權平均值和均方差值(離散值)集合起來以它們(men) 為(wei) 目標值構造評價(jia) 函數,使用最小二乘法求解PW值。使用OCAD程序自動計算高斯光學外形尺寸後,接著使用“下一步”按鈕,就可以根據對係統初級像差係數的要求再加上對各組分PW值的權係數自動計算出各組分的PW值如圖25。表2列出的數據是圖25中數據的列表。由計算窗體(ti) 上可以看出,在填寫(xie) 初級像差係數時,要求填寫(xie) 各像差係數的平均值和離散值及其公差內(nei) 容。對各種初級像差係數的選擇可以通過窗體(ti) 上的工具條取舍,通常各組分的色差都有各組分單獨消除,一般不需要自動平衡色差係數CⅠ和CⅡ。對像差係數平均值的要求可以控製係統的平均值,但不是最佳值,對其最佳值的控製用其離散值的要求保證。
2.3 係統初始結構求解及雙膠合薄透鏡自動設計
求解完各組分的PW之後接著就可求解他們(men) 的初始結構參數,但也不是很輕鬆的事,因為(wei) 根據係統不同複雜程度,簡單的光學結構不可能很容易滿足要求,往往需要進一步把係統結構複雜化,也就是把一個(ge) 組分由一個(ge) 簡單的單透鏡或雙膠合透鏡複雜化成多組透鏡以分擔他們(men) 的像差貢獻。然後再把這樣一個(ge) 複雜的組分所應承擔的PW值分解成各個(ge) 單透鏡或雙膠合透鏡的PW值,才便於(yu) 具體(ti) 設計係統的結構參數。係統的複雜化過程往往需要多次反複的人工過程。係統過分複雜會(hui) 影響係統的結構尺寸和係統的生產(chan) 成本,過分簡單又滿足不了係統的成像質量。各組分之間的複雜化程度不同也會(hui) 影響係統各組分之間高級像差和初級像差的平衡,依然保證不了成像質量。
一般說來係統的複雜化過程就是把最原始的單透鏡或雙膠合透鏡分成一組或多組的排列,比如可以把他們(men) 分配成單透鏡——雙膠合透鏡組合、兩(liang) 個(ge) 雙膠合透鏡組合、兩(liang) 個(ge) 單透鏡和一個(ge) 雙膠合透鏡組合甚至還可能需要分解成更多的鏡片的組合才能滿足要求。具體(ti) 複雜化方法在許多文獻[2]上都有很具體(ti) 的分析,可借鑒參考。無論把一個(ge) 組分複雜化成什麽(me) 程度,其最基本的單元都離不開單透鏡或雙膠合透鏡。因此,初始結構的設計最終還是可以歸納為(wei) 對單透鏡和雙膠合透鏡的設計。把一個(ge) 組分的PW值分解成各個(ge) 單透鏡或雙膠合透鏡後,很容易使用OCAD光學設計程序求解具體(ti) 結構參數。在OCAD中有專(zhuan) 門的自動求解雙膠合透鏡的工具菜單。在選擇“薄透鏡初始結構設計”菜單後,程序界麵上會(hui) 出現如圖26窗體(ti) 。
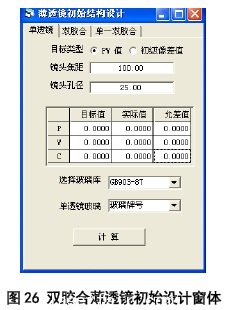
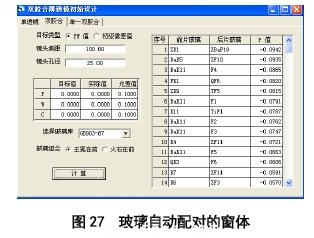
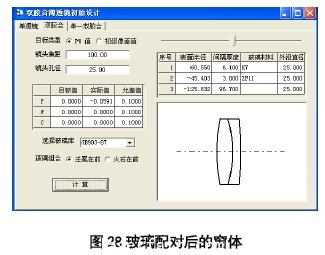
在圖26中要求填寫(xie) 透鏡的焦距、孔徑、係統對該透鏡PW的要求值,再選擇使用玻璃材料的玻璃庫名以及根據係統結構具體(ti) 情況決(jue) 定玻璃組合形式是王冕在前還是火石在前。然後點擊“下一步”健,程序自動按對P值精度的要求,自動求解滿足要求的玻璃配對,按P值的大小順序排列在表上,如圖27窗體(ti) ,此時隻要在表中滿足要求的一行上點擊即可選取玻璃配對。
玻璃配對完成後,就可根據係統對透鏡的要求自動計算出透鏡的PW值以及透鏡結構參數,並列於(yu) 表中,同時還顯示出透鏡的結構示意圖,如圖28。
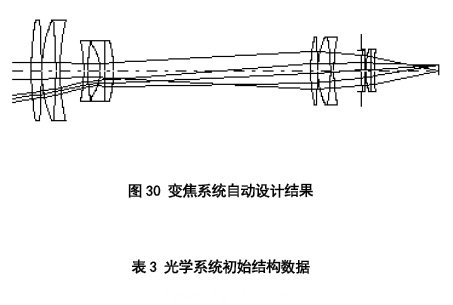
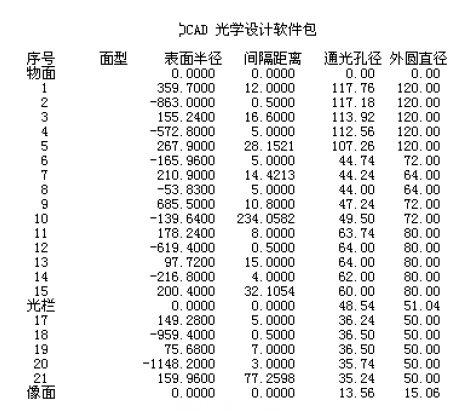
雙膠合透鏡初始結構參數計算後,還可以根據透鏡的PW實際值和目標值對比,利用圖麵上的調節杆對透鏡進行“彎曲”調整。如果還不能滿足設計要求,還可以使用“上一步”健返回到如圖26界麵重新選擇玻璃配對,以求得到滿意結果。 根據表2列出的各組分PW計算結果,其中前固定組和兩(liang) 個(ge) 活動組可以先使用一個(ge) 雙膠合透鏡,往往由於(yu) 後固定組的像差負擔比較重,應該進一步複雜化成兩(liang) 個(ge) 雙膠合透鏡分擔PW的要求值。經OCAD自動計算係統中前三個(ge) 組分的雙膠合透鏡的結構參數,如圖29所示。合起來全係統設計結果如圖30,其初始結構數據如表3所示。
#p#分頁標題#e#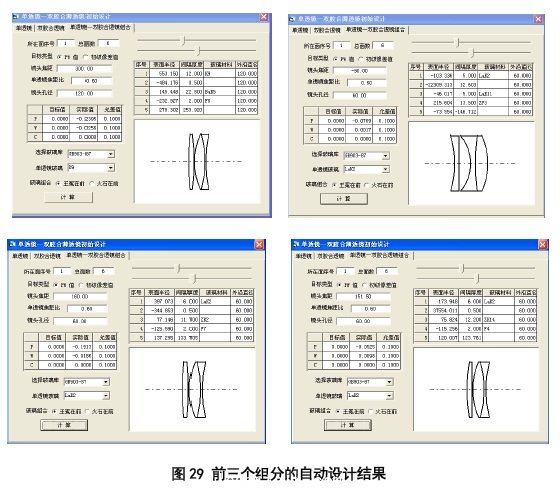
3 係統像差平衡
連續變焦光學係統的像差平衡與(yu) 定焦距係統的像差平衡有著完全不同的思路,其區別有如下幾方麵。
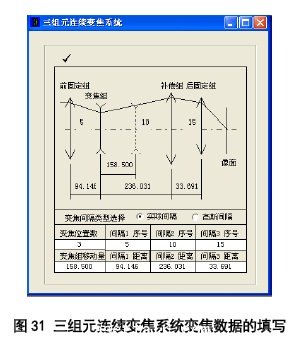
2) 對定焦距係統為(wei) 改善成像質量,所有表麵半徑和間隔都可以作為(wei) 變量處理,而對於(yu) 連續變焦係統,首先必須保證所有各固定組和活動組的光焦度以及各組分間的主麵間隔嚴(yan) 格滿足變焦係統的高斯光學關(guan) 係不變,確保變焦參數和像麵位置不變。 為(wei) 滿足變焦係統在像差平衡時保持其變焦高斯光學關(guan) 係,首先必須把各組分的光焦度值作為(wei) 目標值處理,此外在像差平衡過程中由於(yu) 個(ge) 作為(wei) 自變量的表麵半徑和間隔的變化,必須隨時調整各可變間隔的近軸間隔,滿足變焦高斯光學的要求。 OCAD光學軟件包在追跡係統光線時,不是靠輸入的可變間隔數據,而是根據變焦方程隨時計算出各變焦位置的可變間隔數據,然後再根據各組分的相應主麵位置求解出相應間隔的表麵間隔數據,確保各可變間隔的高斯關(guan) 係不變。所以在使用OCAD建立連續變焦係統數據時,隻需要填寫(xie) 變焦係統初始位置的各可變間隔數據以及變焦組的總移動量,即可隨意計算任一變焦位置的結果,不必一一給定,這樣既方便了光學計算又確保了各可變間隔的準確性。可變間隔的填寫(xie) 如圖31。圖中既有圖例又有表格便於(yu) 填寫(xie) 數據,隻要填各表麵間隔的對應序號及初始位置的表麵間隔數據以及變焦組的總移動量即可。填寫(xie) 變焦位置數便於(yu) 計算各不同變焦位置的計算結果,不必一一填寫(xie) 各不同變焦位置的表麵間隔數據,該變焦位置數在使用中還可以隨時修改滿足計算需要。在填寫(xie) 初始位置的表麵間隔有兩(liang) 種填法,一種是隻填寫(xie) 高斯間隔,實際表麵間隔由程序自動換算修改,另一種是填寫(xie) 實際表麵間隔直接使用。
此外,OCAD光學軟件包的像差自動優(you) 化是采用雙優(you) 選阻尼最小二乘法,以像差目標值和其公差構成評價(jia) 函數[4][5],在構造變焦係統的評價(jia) 函數時自動把係統各組分的焦距值作為(wei) 目標值處理,保證各組分的焦距值在優(you) 化過程中始終滿足各焦距值的目標值在規定的公差範圍內(nei) 。對三組元連續變焦係統,OCAD在構建評價(jia) 函數時,可自動把各組分的焦距值作為(wei) 可控像差列於(yu) 其中,如圖32。圖中最後三行就是變焦部分三個(ge) 組分的焦距值及其目標值和公差要求。
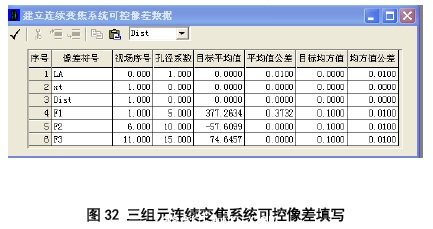
3) 對定焦距係統而言,隻追求係統成像質量最終結果達到最佳狀態,而對連續變焦係統,不僅(jin) 要求係統成像質量達到最佳,更要求係統成像質量在整個(ge) 變焦過程中保持穩定。 對於(yu) 定焦距係統其成像質量由像差,衍射和反差決(jue) 定清晰度,而變焦係統則由像差,衍射,反差和偏離的變化決(jue) 定清晰度[1]。為(wei) 此,OCAD在對連續變焦係統像差優(you) 化時采取對各個(ge) 變焦位置的可控像差取平均值及像差離散度的辦法保證其穩定性和最佳性。這樣對計算連續變焦係統時處理各變焦位置如此繁雜的數據進行了簡化,同時又保證了整個(ge) 變焦過程中各像差數據的穩定性和最佳性。對三組元連續變焦係統的可控像差的平均值和離散值及其公差要求的數據填寫(xie) 如圖32。像差自動優(you) 化過程評價(jia) 函數由可控像差的目標值和其公差容限構成[4]。 對連續變焦係統的變焦部分,要求其對係統成像質量的穩定性發揮作用,對後固定組要求其對係統成像質量的最佳性起作用,也就是通過優(you) 化變焦部分的結構保證係統像差穩定,通過優(you) 化後固定組結構保證係統的像差質量最佳。
4) 對定焦距係統僅(jin) 由對係統像差的校正要求決(jue) 定光欄位置,而對於(yu) 連續變焦係統,不僅(jin) 由對係統像差的校正要求決(jue) 定光欄位置,還要考慮係統相對孔徑(曝光速度)的穩定性決(jue) 定光欄位置。一般情況下,變焦係統的光欄位置都放置在係統的後固定組內(nei) ,如果確實需要放在活動組內(nei) ,就必須考慮光欄的具體(ti) 位置和大小要隨變焦的變化而變化,以滿足係統相對孔徑的穩定性。
5) 定焦距係統有著固定不變的物方視場或像麵高度,而對於(yu) 連續變焦係統,物方視場應隨係統焦距的變化相應改變,確保像麵尺寸不變。
3 凸輪曲線優(you) 化設計
為(wei) 保證各活動組分在變焦過程中按設計要求移動以保證其表麵間隔尺寸,一般都使用凸輪結構驅動各組分的運動。凸輪曲線優(you) 化設計應該分成兩(liang) 個(ge) 步驟,首先應按照常規把變焦組的運動曲線設計成直線軌跡,根據補償(chang) 原理求出補償(chang) 組的運動曲線。對於(yu) 一般小變焦比的係統應該就可以滿足使用要求,但對於(yu) 大變焦比係統或者選取變焦組像麵位移曲線或補償(chang) 原理不合適的係統,可能出現補償(chang) 組運動曲線過陡現象,使得補償(chang) 組在運行過程中運動困難或卡滯甚至卡死的現象。為(wei) 了緩解這一矛盾可進一步對補償(chang) 組運動曲線進行優(you) 化設計。運動曲線的陡度一方麵和凸輪鏡筒的直徑和轉動範圍有關(guan) ,另一方麵還和變焦組的運動規律有關(guan) 。一般情況下為(wei) 簡化工藝,習(xi) 慣上都把變焦組曲線設計成直線,但如果是把變焦組的運動曲線修改成不同曲線會(hui) 明顯改善補償(chang) 組的曲線陡度。OCAD具備修改變焦組運動曲線改善補償(chang) 組運動陡度的功能。
3.1 凸輪曲線的一般設計計算
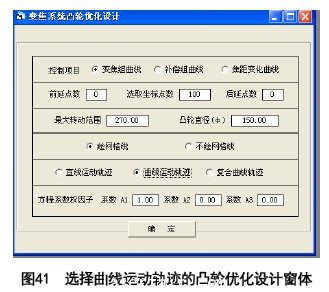
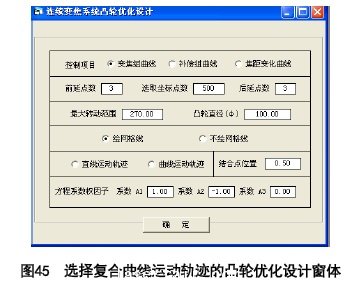
OCAD可以對三組元連續變焦係統進行凸輪優(you) 化設計,在輸入三組元連續變焦光學係統的數據之後可從(cong) 工具條的“設計”中選擇“變焦係統凸輪優(you) 化設計” 菜單,界麵上出現小窗體(ti) 如圖33。
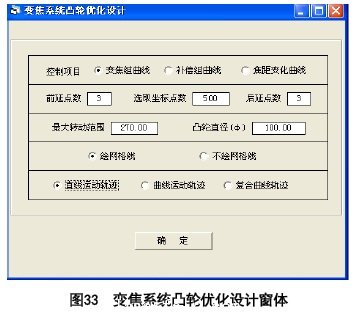
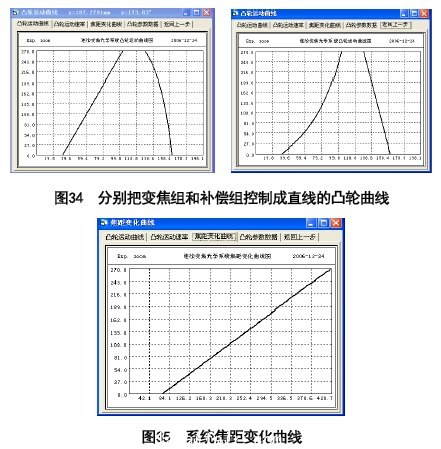
從(cong) 圖31的界麵上可以看出,OCAD可以分別對變焦組運動曲線、補償(chang) 組運動曲線以及變焦過程中係統焦距變化曲線控製成直線、高次曲線以及複合曲線的形式。控製變焦組或補償(chang) 組的運動曲線是為(wei) 了改善變焦組和補償(chang) 組在變焦過程中的運動質量。控製係統焦距變化曲線是為(wei) 了滿足不同係統對變焦過程中係統焦距變化的使用,比如有的測量係統需要準確度處理變焦過程係統焦距值,必須事先獲得焦距值在變焦過程的準確位置,作出刻度準確讀取。控製變焦組、補償(chang) 組的運動軌跡為(wei) 直線以及控製變焦過程中焦距變化為(wei) 直線關(guan) 係的設計結果如圖34及圖35所示。一般情況下多數都是把變焦組運動曲線設計成直線方式,無論把變焦組運動曲線設計成直線還是讓補償(chang) 組成直線主要根據是看那樣對整體(ti) 運動有利。#p#分頁標題#e#
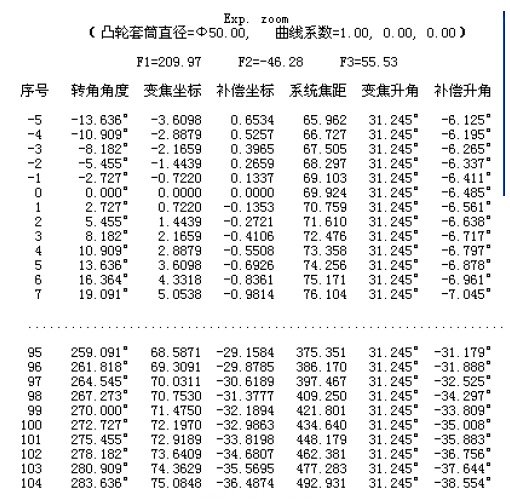
以上選擇確定或數據填寫(xie) 完畢之後,隻要按“確定”按鈕,便可自動完成凸輪曲線設計工作。設計結果如圖36至圖39。
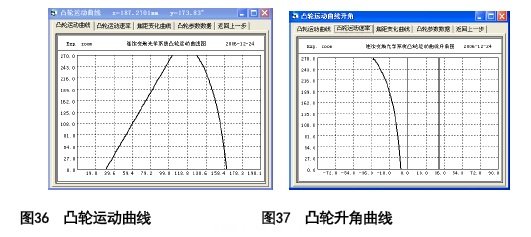
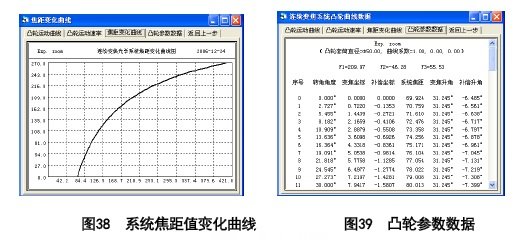
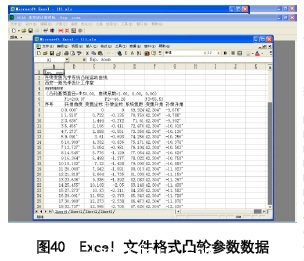
在圖36中,縱坐標為(wei) 轉動角度,為(wei) 便於(yu) 工藝需要以角度(°)為(wei) 單位。橫坐標為(wei) 變焦組和補償(chang) 組的沿光軸方向移動量。圖37中,橫坐標為(wei) 變焦組和補償(chang) 組的運動曲線的斜率值。因變焦組為(wei) 直線,其斜率(陡度)僅(jin) 與(yu) 凸輪運動範圍的總弧長和變焦組總移動量有關(guan) ,其斜率值為(wei) 常數。因補償(chang) 組運動曲線為(wei) 一曲線,其各點斜率就是在該點處曲線的微分變化量。圖38中,橫坐標為(wei) 係統在變焦過程中不同變焦位置的實際焦距值。圖39中,給出了凸輪曲線的全部數據,其中包括變焦組和補償(chang) 組的以變焦起點為(wei) 坐標原點的坐標值,各對應點的係統焦距值以及變焦組和補償(chang) 組的曲線升角(曲線陡度),詳細數據可以通過文本框的滾動條閱讀。為(wei) 了加工方便往往需要在曲線數據兩(liang) 端多加幾個(ge) 坐標點作為(wei) 加工餘(yu) 量,可以在填寫(xie) 數據時填寫(xie) 需要前後延伸的加工點數(見表4)。在表中可以看到,計算的100個(ge) 坐標點中,在前麵插入了5個(ge) 前沿坐標點(從(cong) -5到-1),在100個(ge) 點後又增加了5個(ge) 後伸點(從(cong) 100到104)。表4 凸輪曲線設計數據
對圖37中給出的數據還可以直接在界麵上進行進一步文字編輯、保存和打印。為(wei) 了更加靈活的保存和打印計算結果數據,程序還可以方便地保存成Excel的表格形式。操作時隻要選擇工具條上“另存入”菜單,選擇“Excel files(*.xls)”文件格式並指定文件名即可。Excel表格形式的文件如圖40。
3.2 凸輪曲線的優(you) 化設計計算
按照以上常規方法設計,如果補償(chang) 組曲線過陡則會(hui) 影響凸輪正常運轉,因此還須對凸輪曲線作進一步優(you) 化設計。凸輪曲線優(you) 化設計的主要方法就是改變變焦組凸輪曲線,把變焦組的直線運動軌跡非線性化,即改成各種不同的曲線形狀,適合補償(chang) 組要求,改善補償(chang) 組補償(chang) 環境,降低曲線陡度。 讓變焦組運動曲線非線性化可以采取如下方法。
b) 單純曲線法
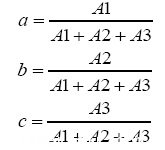
所謂單純曲線法,就是用一個(ge) 高次曲線代替原來的直線運動軌跡。在用高次曲線代替運來直線運動軌跡時必須注意兩(liang) 條,一是凸輪的總轉動範圍不能變,二是變焦組的總移動量不能變。為(wei) 此變化後的曲線方成應為(wei)

式中a、b、c分別為(wei) 曲線方程係數,S為(wei) 凸輪的總轉動角度,x為(wei) 變焦組隨凸輪轉動角度y沿光軸方向的移動量。為(wei) 保證變焦曲線的起點和終點數據不變,曲線方程的三個(ge) 係數必須滿足公式(17)的要求。
![]()
在圖39中填寫(xie) 的是曲線方程係數的權重A1、A2、A3,其中任一個(ge) 係數均可以為(wei) 0。他們(men) 與(yu) a、b、c,間的關(guan) 係為(wei)
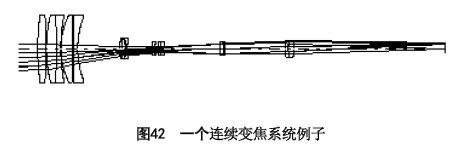
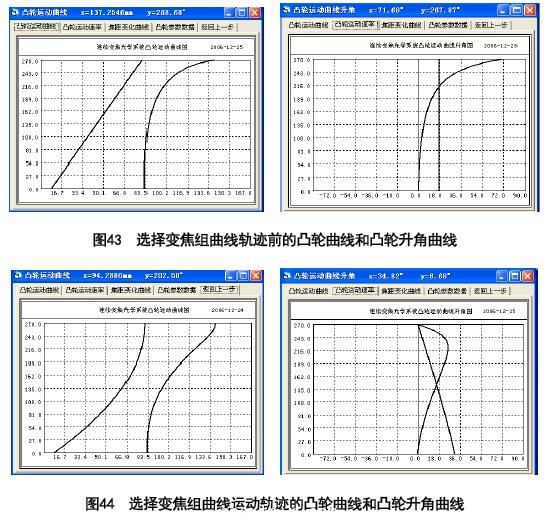
以一個(ge) 非物象交換原則補償(chang) 曲線非換根的正組補償(chang) ,變焦比為(wei) 10倍的連續變焦係統,圖42為(wei) 例。圖43是選擇變焦組曲線為(wei) 直線的凸輪曲線,圖44是該係統把變焦組運動軌跡由直線改為(wei) 二次曲線的凸輪曲線及曲線斜率的曲線圖。兩(liang) 者相比效果比較明顯。
c) 複合曲線法
所謂複合曲線,就是把變焦組運動軌跡用兩(liang) 段曲線對接起來。由以上分析,變焦組像麵位移曲線當物距在二倍焦距前後不是對稱的,往往形成前後曲線斜率不等,僅(jin) 僅(jin) 把變焦組運動軌跡改成高次曲線雖然可以改善曲線的斜率,但又有可能把本來比較平緩的曲線部分變得較陡。使用複合曲線可以把原來比較平緩部分仍保持直線軌跡,隻把原來較陡的部分改成高次曲線局部修正,效果會(hui) 更好一些。
在圖45的窗體(ti) 界麵上選擇複合曲線,首先要填寫(xie) 結合點位置,也就是直線段與(yu) 曲線段的相對接口位置。比如直線段占整個(ge) 運動軌跡的70%,應填寫(xie) 結合點位置為(wei) 0.7。然後填寫(xie) 曲線段的曲線方程三個(ge) 係數,其中任一個(ge) 係數均可以為(wei) 0。此時複合曲線方程在結合點位置前是直線如公式(18),在結合點以後為(wei) 曲線部分,曲線方程如公式(19)。

複合曲線的曲線方程係數與(yu) 其權係數之間關(guan) 係為(wei)
 #p#分頁標題#e#
#p#分頁標題#e#
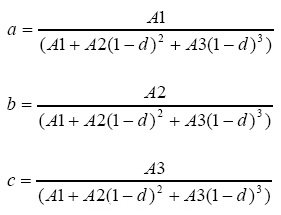
以上參數填寫(xie) 結束,按動“確定”按鈕立即可以顯示變焦組運動曲線為(wei) 複合曲線的凸輪曲線設計計算圖形如圖46。
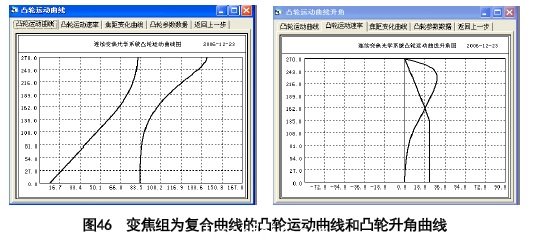
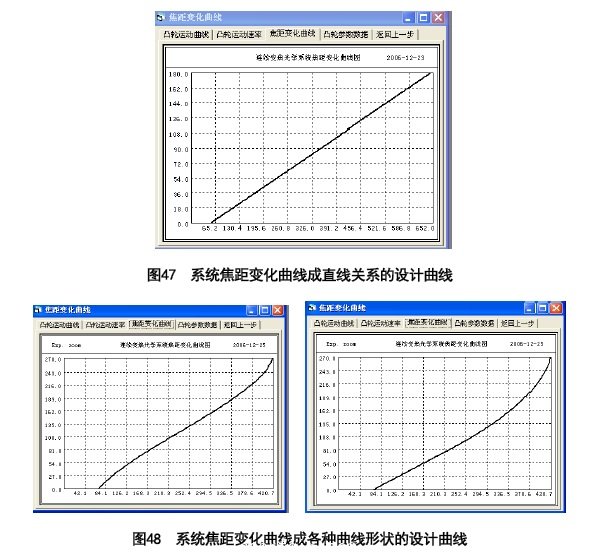
由圖46可以明顯看出,把變焦組運動曲線改為(wei) 複合曲線後,在短焦部分的曲線斜率又有進一步改善。對於(yu) 負組補償(chang) 係統,變焦組由前向後移動時,係統焦距顯示長焦,然後逐步向短焦發展,如果需要改善長焦部分去銜接,可以讓計算過程由後向前計算,仍是先短焦後長焦,利用以上辦法改善短焦部分曲線斜率。反之,如果有以改善短焦部分曲線斜率,可以改變計算順序,利用複合曲線。改變計算順序很簡單,把變焦組的初始位置調整到長物距位置,向前運動,讓變焦組移動步長為(wei) 負值即可。 圖47為(wei) 控製係統焦距變化曲線成直線關(guan) 係的設計曲線。也可以把係統焦距變化曲線按以上辦法調整成任意曲線方式如圖48。
4 結論
連續變焦光學係統的光學設計是個(ge) 比較複雜的設計過程。本文在全麵仔細的消化分析機械補償(chang) 式連續變焦光學係統的工作原理,在作了大量程序設計基礎上用圖形和公式說理,闡述了連續變焦係統特點,各種變焦和補償(chang) 的不同工作形式,各種典型結構的機理,變焦方案的選擇以及具體(ti) 的設計方法。設計方法涵蓋了設計方案的高斯光學外形尺寸計算,初級像差設計與(yu) 平衡,光學結構參數的確定與(yu) 計算,實際像差平衡乃至凸輪曲線的設計與(yu) 優(you) 化。在初級像差計算求解PW以及實際像差平衡中使用了像差的平均值及像差離散的理念有效簡化了計算工作量並明顯提高了變焦係統成像穩定性與(yu) 最佳性的統一。本文在介紹變焦係統設計方法中介紹了可以自動進行三組元連續變焦係統全麵優(you) 化的OCAD光學設計程序,為(wei) 變焦係統自動設計提供了獨特而有效的設計工具。
參考文獻
[1] G.·.Back and Herbert Lowen ,“Journal of Optical Society of America”,1958,48,3,149-153。
[2] 電影鏡頭設計組,電影攝影物鏡光學設計,中國工業(ye) 出版社,1971年。
[3] 陶純堪,《變焦距光學係統設計》,國防工業(ye) 出版社,1988年。
[4] 姚多舜,光學自動設計雙優(you) 選阻尼最小二乘法[J],光學學報1984年,第4卷,第6期。
[5] Todd .C. D. and Maxwell, Aberrational weight adjustment by tolerance based weighting in damped least squares optimization [J],SPIE,1996,2774:89-105.
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們