




對於(yu) 機械補償(chang) 式連續變焦係統,總有一個(ge) 變焦組分和一個(ge) 補償(chang) 組分分別以不同規律運動以保證在改變組分間隔達到連續變焦的同時自動補償(chang) 像麵位移誤差。這兩(liang) 個(ge) 組分的運動規律通常要求變焦組以線性規律移動,而補償(chang) 組則以非線性規律運動。兩(liang) 組鏡頭的運動多是以機械凸輪機構驅動實現的。驅動凸輪曲線的斜率(陡度)直接影響著運動的平滑度,陡度超過一定程度時會(hui) 使機構運動“卡死”。凸輪曲線的陡度一方麵和曲線套筒的直徑以及曲線套筒的轉動總角度有關(guan) ,另一方麵還和曲線的方程以及移動組總移動量有關(guan) 。曲線套筒的直徑受鏡筒外圓直徑約束,曲線套筒的總轉動角度也有一定限製。因此,曲線的陡度歸根結底是和曲線方程以及移動組總移動量有著密切關(guan) 係,特別對於(yu) 變焦倍率(變焦比)的係統因曲線陡度過大而使運動卡死是經常麵臨(lin) 的困難。OCAD具有對凸輪曲線優(you) 化設計的功能,把一個(ge) 線性運動和一個(ge) 非線性運動變成兩(liang) 個(ge) 非線性運動的結構形式,這樣可以在不改變變焦組和補償(chang) 組相對移動關(guan) 係的前提下調整補償(chang) 組運動曲線降低曲線陡度,改善使用效果。在圖4中是一個(ge) 20倍連續變焦係統的凸輪曲線在高倍階段斜率達到75°之高已造成運動卡死如圖1所示。經OCAD對凸輪曲線進行優(you) 化後可以明顯改善曲線斜率,斜率最大值不超過30°,如圖2所示。明顯改善了凸輪曲線性能。經優(you) 化的凸輪曲線坐標數據列於(yu) 圖3,便於(yu) 直接提供數控機床加工,坐標點數可以根據需要選擇。顯示數據還可以直接轉換成word格式文件或excel工作表格式如圖4所示。
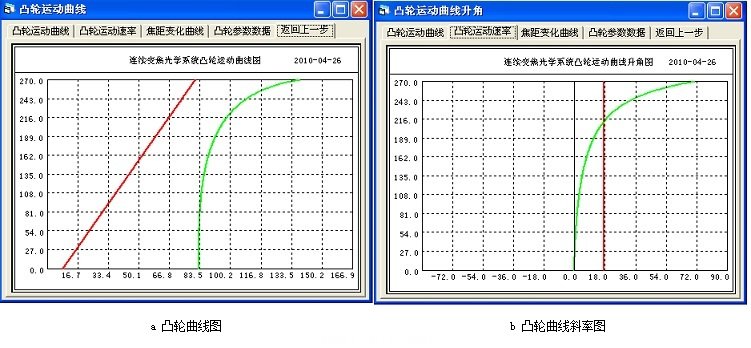
圖1 優(you) 化前凸輪曲線斜率對照
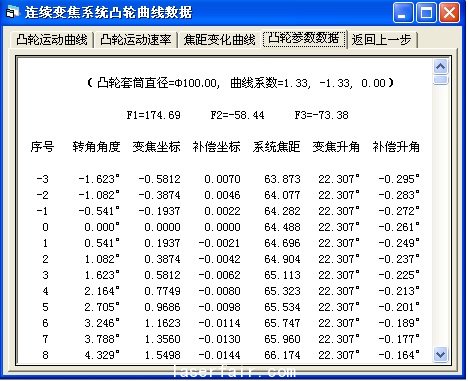
圖3 凸輪曲線坐標數據
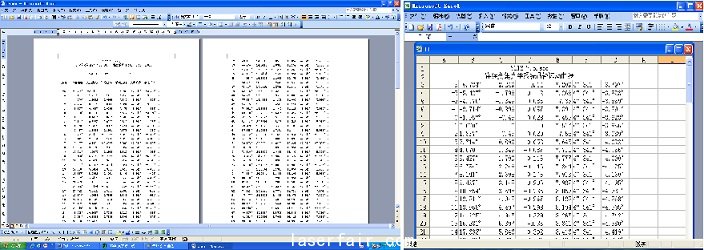
圖4 凸輪曲線坐標數據的多種數據格式文件
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們