





激光加工即是利用激光作為(wei) 能量,將材料熔化而後成型的一種加工方法。按加工的目的,可以分為(wei) 激光切割、激光打標、激光焊接、激光熔敷、激光增材製造等。激光的溫度可達到6000°,作用於(yu) 材料能瞬間將材料熔化甚至氣化。作為(wei) 典型的熱加工,以熱影響區小、加工速度快,成型後無需後續加工而著稱,特別適合於(yu) 薄板或受熱容易變形的材料。考慮到激光的安全性,以及激光加工的高效性,激光加工通常采用自動化輔助生產(chan) ,能高效完成加工任務。
激光加工的基礎是激光加工係統,武漢法利萊的萬(wan) 瓦加工係統,集激光切割、焊接、熔敷、掃描焊一體(ti) ,是激光加工係統的集大成者。
一套完整的激光加工係統包括激光器(含光纖、冷水機和穩壓電源)、激光頭、運動機構(機器人或機床)、工作平台、其他輔助裝備(工控機、冷幹機、輔助水氣等)。以下簡要介紹激光器、激光頭和運動機構等三部分。
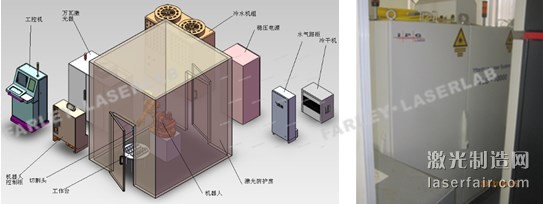
圖1 激光加工係統模型(左)和萬(wan) 瓦激光器(右)
激光器是激光加工的核心,目前,主要采用光纖激光器,其光束質量好,電光轉化效率高,免維護,適合於(yu) 各種材料加工。
目前主流的激光器有CO2激光器、光纖激光器、半導體(ti) 激光器、碟片激光器等。
方向單一是激光的主要特性,基於(yu) 這一點,可以通過光學傳(chuan) 輸輸出不同大小的光斑,從(cong) 而適用不同的加工。另外,激光能量集中,使得激光的穿透能力強,適用於(yu) 厚板的加工。
激光加工係統適應於(yu) 加工件結構特點的運動機械構成其運動機構,通常采用機床加工,目前主流的加工手段是機床加工,其加工精度高,穩定性好,主要應用於(yu) 二維加工,包括激光打標、激光切割、激光熔敷;采用機械手臂,柔性好,易於(yu) 實現三維加工,包括三維激光切割,激光焊接等;加工精度比機床精度差,靈活性更佳,占地麵積相對較小。

圖2 機床(左)和機器人(右)
激光頭是激光加工輸出光能量的終端機構,通過光學鏡片組合,先將激光擴束,然後通過光學鏡片將激光放大的過程。按照激光加工的功能,可分為(wei) 激光切割頭,激光焊接頭,激光熔敷頭,掃描激光頭,激光打標頭等。
普通的激光切割頭,附帶吹氣嘴,采用高壓能將激光熔化的材料吹除,從(cong) 而形成切縫。目前汽車廠主流使用的激光釺焊頭,其附帶激光自動聚集功能,從(cong) 而更加有利於(yu) 激光加工的穩定性。掃描激光頭,能利用鏡片角度的轉動和位置的移動,保證激光作用於(yu) 工件的光斑大小不變,而且通過精確的控製,在激光頭姿態不改變的前提下,能夠實現圓形,直線段,C型等結構的焊縫結構。
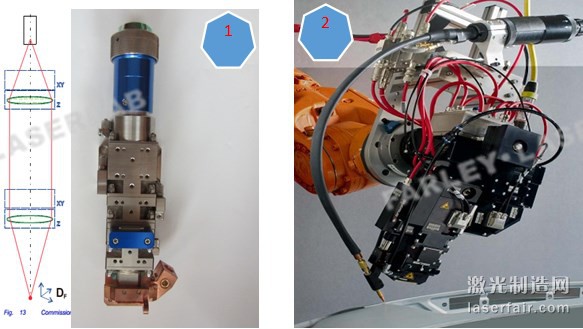
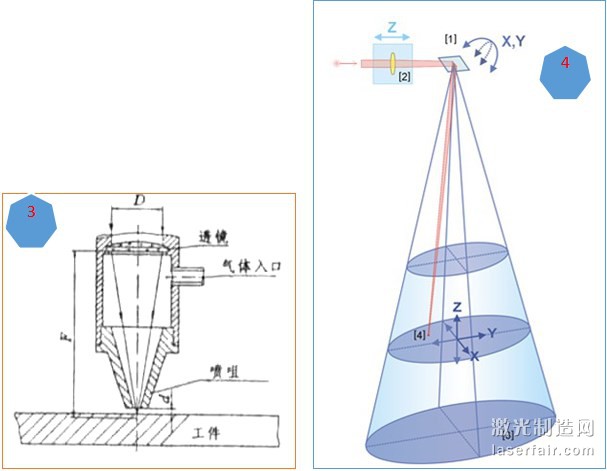
1 激光焊接頭;2 激光釺焊頭;3 激光切割頭;4 激光掃描焊接頭光束原理
圖3 各種激光加工頭
激光加工應用效果如下所示
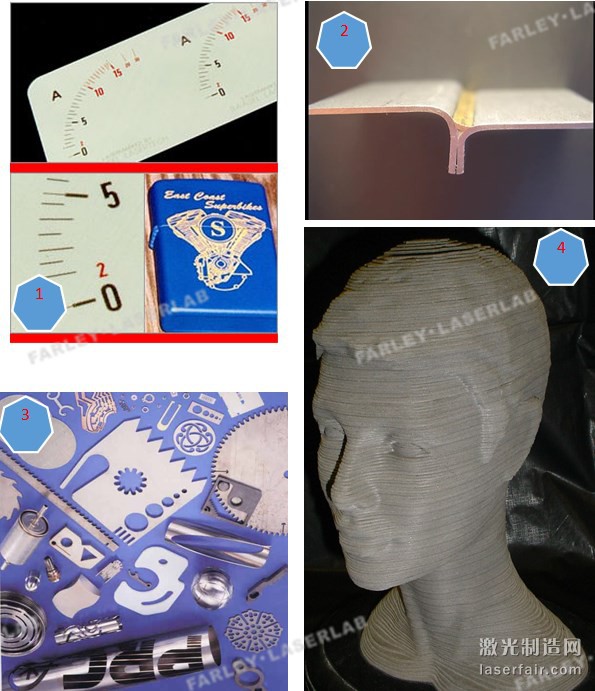
1 激光打標;2 激光釺焊;3 激光切割;4 激光增材製造
圖4 激光加工效果圖
機器人應用
蒸氣機的發明,部分的解放了人類的雙手,使得工業(ye) 革命變成一種可能;發電機的發明,電力代替人手工勞作得到普及;計算機等的發明,給機械安裝大腦,帶來機械運行速度的極大提升;未來智能工廠的普及,將使得製造不再以標準化的產(chan) 品為(wei) 準,而將以人的個(ge) 性化需求為(wei) 基礎,通過智能控製整個(ge) 產(chan) 業(ye) 鏈,極大的滿足個(ge) 性化需求,而且能有效的提升產(chan) 品的生產(chan) 效率。機器人的應用,是通向智能製造的一個(ge) 基礎。
目前,主流的機器人廠家有德國KUKA,日本的FUNAC,瑞典的ABB,國內(nei) 有首鋼的莫托曼和沈陽新鬆機器人。機器人主要有兩(liang) 部分組成,包括硬件(主要是指機器人的機械手臂,包括減速機、編碼器等)和軟件(機器人本體(ti) 的控製器)。
工業(ye) 機器人有以下三大功能:
1、運動功能(在可達空間內(nei) 任意點的運動到達);
2、信號交換及功能實現(與(yu) 其他設備進行信號交換,控製其他設備的開啟和關(guan) 閉,或被PLC控製與(yu) 其他設備一起實現功能);
3、仿真及軌跡模擬(圖5如示,通過仿真及軌跡模擬,研究機器人軌跡的可達性、CT循環時間等)。

圖5 機器人模擬(左)及機器人軸數(右)
關(guan) 於(yu) 機器人的選型,考慮以下問題:
1、品牌及定價(jia) ;
2、負載:機器人六軸負載重量和轉動慣量;
3、軸數:機器手臂的軸數量(如圖5右所示);
4、行程:機器人所能達到的最大路徑區間;
5、精度:達到某位置點的精度和重複運動的定位精度;
6、安裝方式:水平或倒置;
機器人的主要應用如下:點焊、搬運、噴塗、切割、塗膠(如圖6)等;
1 點焊;2 搬運; 3 噴塗;4 塗膠;5 切割

圖6 機器人應用
機器人視覺
機器人視覺(如圖7)是使機器人具有視覺感知功能的係統,是機器人係統組成的重要部分之一。機器人視覺可以通過視覺傳(chuan) 感器獲取環境的二維圖像,並通過視覺處理器進行分析和解釋,進而轉換為(wei) 符號,讓機器人能夠辨識物體(ti) ,並確定其位置。機器人視覺硬件主要包括圖像獲取和視覺處理兩(liang) 部分,而圖像獲取由照明係統、視覺傳(chuan) 感器、模擬-數字轉換器和幀存儲(chu) 器等組成。根據功能不同,機器人視覺可分為(wei) 視覺檢驗和視覺引導兩(liang) 種,廣泛應用於(yu) 電子、汽車、機械等工業(ye) 部門和醫學、軍(jun) 事領域。汽車行業(ye) 中,經常用機器人視覺來讀取車輛類型、測量車身的尺寸。

圖7 機器人應用
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們