




-
基於激光雷達避障的機器人控製係統設計
引 言 移動機器人是一種能夠感知外部環境,在有障礙物的環境中能夠實現動態決(jue) 策與(yu) 規劃,從(cong) 而完成避障等多種功能的綜合係統。機器人係統通常分為(wei) 機構本體(ti) 和控製係統兩(liang) 部分,控製係統的...
2012-01-14 -
可用於生產線的工業機器人研究
1簡介 隨著信息技術、材料技術、新能源技術等新技術與(yu) 製造技術的相互交叉、滲透、融合,現在的製造業(ye) 與(yu) 過去相比有了許多重大而深刻的變化。El益增長的複雜性是現在製造業(ye) 的一個(ge) 重要特...
2012-01-13 -
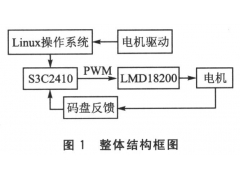
ARM9和Linux在機器人控製係統的應用
引 言 現有智能機器人用直流電機作為(wei) 驅動輪時一般都是用單片機或者高速的DSP等進行控製,智能機器人之所以叫智能機器人,這是因為(wei) 它有相當發達的大腦。在腦中起作用的是中央計算機,這...
2012-01-10 -
視覺導引運動控製係統開發分析(二)
首先您要確定的兩(liang) 個(ge) 坐標係統的角度偏差值。我們(men) 把這一角度稱為(wei) 偏差角。一種簡單的做法是通過移動工作台一個(ge) 已知角度,利用機器視覺係統來測量起始位置和終止位置來確定該偏差角。例...
2012-01-10 -
視覺導引運動控製係統開發分析(一)
過去幾年裏,運動控製係統已經把機器視覺作為(wei) 其關(guan) 鍵部分。越來越多的工程師和科研人員認識到當前的機器視覺技術和運動控製技術相結合對於(yu) 解決(jue) 複雜應用問題有相當大的幫助。軟硬件技...
2012-01-10 -
提高大型激光加工機器人精度的方法
4 機器人誤差模型(Roboterrormodel) 4.1 誤差補償(chang) 方法 在進行機器人誤差補償(chang) 及標定時,首先要考慮機器人的精度問題。在示教再現作業(ye) 方式下,操作者移動機器人末端執行器到指定位置,然後通過...
2012-01-09 -
提高大型激光加工機器人精度的方法(一)
摘要:本文介紹了大範圍、高精度5軸激光加工機器人係統的研究開發情況。在提高其絕對精度的前提下,對大範圍框架式機器人的結構、高精度機器人的誤差補償(chang) 方法進行了探討。采用有限元...
2012-01-09 -
機器人為激光焊接技術帶來靈活性
在位於(yu) 芬蘭(lan) Laitila 市的 Innova 培訓中心有一個(ge) 全歐洲最先進、靈活的激光焊接單元之一。 庫卡機器人有限公司、公司係統合作夥(huo) 伴 Kine Robot Solutions 公司和 Innova 培訓中心將經驗與(yu) 高新技術結合...
2012-01-09



 排行榜
排行榜
 編輯推薦
編輯推薦





 關注我們
關注我們