




-
如何將 DVT 智能相機的坐標轉換成機械手的坐標
用機器視覺為(wei) 機械手準確定位物體(ti) ,是現今眾(zhong) 多機器人走向柔性,適應性的橋梁。但是,機器視覺隻能給出物體(ti) 在相機攝像範圍內(nei) 的位置。因此,怎樣讓機器人通過此位置來確定物體(ti) 在機械手...
2011-12-21 -
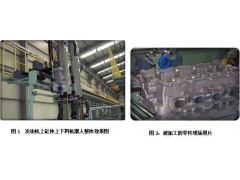
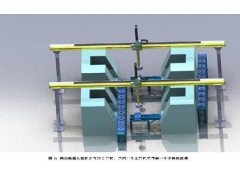
發動機殼體自動上下料機器人
前言: 發動機上杠體(ti) 和缸體(ti) 都比較重,在加工時把它們(men) 搬運到加工中心工作台的工裝上及把加工完的缸體(ti) 搬運下來是個(ge) 很繁瑣的工作。國內(nei) 外都采用機器人來完成缸體(ti) 的自動上料和下料。韓國...
2011-12-21 -
立車刹車盤上下料機器人
全自動化機床上下料機器人在國內(nei) 外各種機加行業(ye) 中被越來越廣泛地應用。利用輸送設備和機器手把多台機床設備連成一個(ge) 全自動或半自動加工線。刹車盤的生產(chan) 量大,加工時間短,很多企業(ye) ...
2011-12-20 -
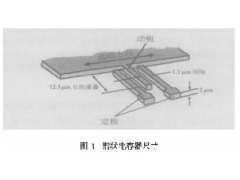
基於MEMS加速度傳感器的雙軸傾角計及其應用
引 言 MAV由於(yu) 體(ti) 積和負載能力極為(wei) 有限,因此,減小和減輕飛控導航係統的體(ti) 積及重量,就顯得尤為(wei) 重要。本文基於(yu) MEMS加速度傳(chuan) 感器,設計一種雙軸傾(qing) 角計,該裝置精度高、重量輕,可滿足M...
2011-12-20 -
機器人的手爪係統
機器人的手爪係統就相當於(yu) 人的手,腳和所使用的簡單工件。根據要完成任務的不同選擇對應的抓取方式。主要涉及到的問題: 1、物體(ti) 表麵非常敏感 被抓取工件的表麵可能非常敏感,要非常...
2011-12-20 -
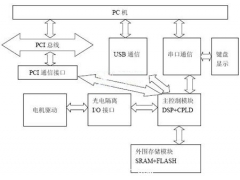
基於DSP的運動控製器的研究與開發
摘 要: 由於(yu) DSP將超強的高速實時處理能力和豐(feng) 富的外設功能集於(yu) 一身,目前,以DSP為(wei) 核心的嵌入式運動控製器已經成為(wei) 開放式運動控製器的發展主流,並獲得廣泛的應用。本文通過 對運動控製...
2011-12-17 -
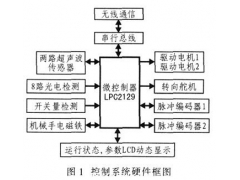
基於無線通信的嵌入式機器人控製係統設計
1 引言 輪式移動機器人是機器人研究領域的一項重要內(nei) 容,它集機械、電子、檢測技術與(yu) 智能控製於(yu) 一體(ti) ,是一個(ge) 典型的智能控製係統。智能機器人比賽集高科技、娛樂(le) 、競技於(yu) 一體(ti) ,已成為(wei) ...
2011-12-17 -
機器人技術重心應從軍用轉到民用
日本海岸發生的災難性大地震引發了一係列悲劇事件,有人提議使用機器人救助災民。據IEEE機器人專(zhuan) 家AntonioEspingardeiro介紹,應該盡可能多地利用機器人,幫助降低日本地震及福島核電站泄露...
2011-12-17

 排行榜
排行榜
 編輯推薦
編輯推薦





 關注我們
關注我們