




全自動化機床上下料機器人在國內(nei) 外各種機加行業(ye) 中被越來越廣泛地應用。利用輸送設備和機器手把多台機床設備連成一個(ge) 全自動或半自動加工線。刹車盤的生產(chan) 量大,加工時間短,很多企業(ye) 都在想法設法提高生產(chan) 效率和提高機加廠房的利用率。為(wei) 此一些企業(ye) 采用立式數控車來加工盤類件。與(yu) 臥車相比,立車占地麵積小,在廠房利用率上占有很大優(you) 勢。而且通常采用雙刀具同時切削,這樣生產(chan) 效率高。所以沈陽玉田精機等一些企業(ye) 專(zhuan) 門開發雙通道(雙刀架)立車。采用雙刀架兩(liang) 把刀從(cong) 兩(liang) 邊同時進給切削,生產(chan) 節拍大幅提高,車加工一道工序時間縮短到24秒左右。為(wei) 了進一步縮短上下料時間,下料采用氣缸先頂起刹車盤,然後另外一氣缸再向側(ce) 麵把刹車盤推出機床外的方式。這樣下料時間就縮短到2~3秒,大幅降低了上下料時間。節拍高了,效率高了,操作者的勞動強度大幅提高。為(wei) 此沈陽萊茵機電開發了兩(liang) 種專(zhuan) 為(wei) 立式數控車自動上下料機器人,不僅(jin) 可靠,實用,而且具有很高的性價(jia) 比。下麵就介紹其中的雙Z軸上下料機器人。
一、機器人的總體(ti) 方案
由於(yu) 刹車盤種類很多,下麵介紹的機器人就是針對大約10公斤的刹車盤的自動上下料。由於(yu) 每道車加工工序大約24秒,下料采用氣缸推下方式,所以采用一台機器人為(wei) 兩(liang) 台數控立車上料和下料。如圖1所示,兩(liang) 台二維機器人給四台立車上料,共用一個(ge) 上料倉(cang) 和一個(ge) 下料傳(chuan) 送帶,每台機器人各用一個(ge) 刹車盤翻轉機構,兩(liang) 個(ge) 桁架和兩(liang) 套控製係統組成。下麵對各個(ge) 部分簡單介紹:

1、桁架:
桁架長度:10.5米長,桁架高度:2.4米。
2、水平運動機械手:
采用德國Roboworker公司的直線運動單元RSL200,有效行程:8600mm,最高運行速度:2M/S,齒輪齒條傳(chuan) 動方式,重複定位精度:±0.1mm。采用德國紐卡特公司的緊密行星減速機和鬆下伺服電機驅動。圖2是直線運動單元RSL200照片。

3、上下運動機械手:
采用德國Roboworker公司的直線運動單元RSL90,有效行程:1100MM,最高運行速度:1M/S,齒輪齒條傳(chuan) 動,重複定位精度:±0.1mm。采用德國紐卡特公司的緊密行星減速機和鬆下伺服電機驅動。
4、機器人手爪:
采用型號為(wei) 3PG100型號的氣動手爪,三指各自有效行程10mm,最大夾持力1800N,張開和閉合時間分別是0.07s和0.08s,重複定位精度0.01mm,重量1.75KG。圖3是手爪的實物照片和抓取刹車盤時的照片。由於(yu) 手爪帶有鉤緊機構,該手爪實際上可以抓取住近20公斤中刹車盤。

5、上料傳(chuan) 送帶
采用滾輪方式傳(chuan) 輸,傳(chuan) 送帶上帶有一個(ge) 隔料器和兩(liang) 個(ge) 對位機構。工作時人工把刹車盤毛坯料放置到滾輪輸送帶上,通過計數控製方式確保兩(liang) 台機器人的抓取處都有毛坯可以抓取。其中右邊的機器人上料抓取處有一個(ge) 氣動升降隔料器。由於(yu) 盤類零件的結構,采用類似圖4給出的隔離對位機構。
隔料對位器作用是把待加工的毛坯從(cong) 傳(chuan) 送帶上停止下來,及通過氣缸頂緊。這樣就能保證毛坯的中心位置處於(yu) 手爪的中心。

6、滾輪下料傳(chuan) 送帶
最後加工完的刹車盤被氣缸頂起及推到滾輪下料傳(chuan) 送帶上。滾道寬度400mm,直接把上麵的刹車盤滾運到側(ce) 麵的,為(wei) 多隊機床配置的下料滾輪傳(chuan) 送帶上,再繼續滾運到的下道工序(質量等)。
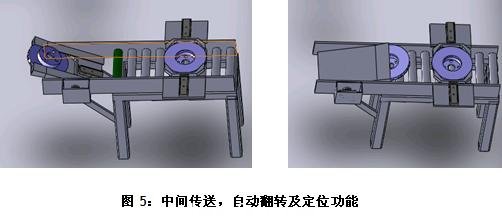
7、機床間傳(chuan) 送及翻轉機構
當第一台立車完成加工,機床門開了及液壓卡盤鬆開後,氣缸先把刹車盤頂起,然後立即推出到機床間傳(chuan) 送帶上。該傳(chuan) 送帶把刹車盤滾運到圖5中翻轉位置。如圖5左圖所示,待檢測到刹車盤完全進入翻轉機構後,翻轉機構就翻轉。然後被滾運到對位處。兩(liang) 邊氣缸同時頂緊,完成對位。這個(ge) 位置就是給第二台立車的上料抓取處。
8、控製係統
采用PLC和觸摸屏作為(wei) 控製係統及人機交互界麵。沒有特殊要求,我們(men) 采用歐姆龍的PLC。如果需要把觸摸屏的信息傳(chuan) 給上位機,可以選擇CANbus,RS485,ProfiBus或EtherCAT等。通常選配手脈控製器,便於(yu) 調式用。
9、潤滑泵
采用機床廠最常用的國產(chan) 潤滑泵,也可以采用進口的潤滑泵。
10、選項:
1)刀具破損檢測
如果需要,我們(men) 可選配刀具破損檢測機構。其主要原理是測量幾個(ge) 位置的外經值,與(yu) 理論值對比,根據直徑變大的差值大小來判斷刀具是否打了。
2)排削措施
如需要可以加上對液壓卡盤和手爪進行自動吹氣排削,確保手爪和卡盤卡爪上幹淨,不影響裝料到位。無論是臥車,還是立車都應考慮采用排削措施。
二、工作流程及節拍分析
正常情況把第一台機床的供料傳(chuan) 送帶上刹車盤隔離對位處為(wei) 每次工作的零點,以後叫工作零點。也是X軸和Z軸的回零點位置,下麵就以手爪在工作零點來分析運動流程及節拍:
1、完成一次加工機床最少用時
1)、機床卡盤張開用時大約4秒。
2)、把零件放入卡盤及等待卡盤卡緊,用時大約4秒。
3)、啟動自動加工循環程序,從(cong) 主軸啟動,加工完,到主軸停止,總計用時24秒。
根據上麵的加工時間和上下料時間,完成一個(ge) 工序加工最短用時為(wei) 32.0秒。如果一台機器人給兩(liang) 台機床上料,那麽(me) 就必須在16秒(=32/2)內(nei) 完成一台機床的上料任務。
2、給第一台機床上料
1)、機器手Z軸從(cong) 零點下降去抓取刹車盤,下降高度大約1500mm,用時1.5秒。
2)、抓住一個(ge) 毛坯盤及把Z軸升高1500mm,用時2.0秒。
3)、機械手水平運動到機床卡盤正上方,運動距離大約1200mm,用時1.0秒。
4)、等待車床門打開,用時不定。機床門打開表示卡盤已張卡,其上麵的刹車盤被推出機床外麵的進床間傳(chuan) 送帶上。
5)、機器手Z軸從(cong) 零點下降到刹車盤放入卡盤內(nei) ,下降高度大約1500mm,用時1.5秒。
6)、手爪鬆開把抓住的毛坯盤放置到卡盤內(nei) ,然後Z軸立即升高1500mm,用時2.0秒。
7)、機械手水平運動到工作零點上方,運動距離大約1200mm,用時1.0秒。
機器人運動總體(ti) 用時:9.0秒。
其中步驟,5)和6)最關(guan) 鍵,總計用時為(wei) 3.5秒。而液壓卡盤的開合時間大約3~4秒。采用同時進行的方式,幾乎沒有浪費時間。
3、給第二台機床上料
1)、機器手Z軸從(cong) 零點下降去抓取刹車盤,下降高度大約1500mm,用時1.5秒。
2)、抓住一個(ge) 毛坯盤及把Z軸升高1500mm,用時2.0秒。
3)、機械手水平運動到機床卡盤正上方,運動距離大約4400mm,用時4秒。#p#分頁標題#e#
4)、等待車床門打開,用時不定。機床門打開表示卡盤已張卡,其上麵的刹車盤被推出機床外麵的進床間傳(chuan) 送帶上。
5)、機器手Z軸從(cong) 零點下降到刹車盤放入卡盤內(nei) ,下降高度大約1500mm,用時1.5秒。
6)、手爪鬆開把抓住的毛坯盤放置到卡盤內(nei) ,然後Z軸立即升高1500mm,用時2.0秒。
7)、機械手水平運動到工作零點上方,運動距離大約4400mm,用時4秒。
機器人運動總體(ti) 用時:15.0秒。而按前麵的分析在16秒完成一台機床的上料任務就可以。所以節拍上沒有問題。另外完成第一台機床上料後就可以立即去抓毛坯,然後運動到第二台機床卡盤上麵,這樣就可以節省時間。采用機床間優(you) 化,不僅(jin) 可以降低運行速度,還可以在平均12~13秒完成一台機床的上料。而選擇的直線運動單元及驅動電機等可以是X軸和Z軸運行速度更高些,總之留有足夠的餘(yu) 量。
三、結論
針對用戶要求,機床采用麵對麵擺放,大幅縮短了水平軸的運動距離,保證了機床的高效節拍短的要求。而刹車盤的自動翻轉結構簡單,實用,高效。在本項目的設計時,沈陽萊茵機電的工程師們(men) 就以安全,可靠,穩定為(wei) 出發點,無論在強度,驅動電機出力,還是最高運送速度等方麵都留有很大的餘(yu) 量。確保該機器人在工作中運行平穩,可靠。X軸高速運動時,Z軸不會(hui) 晃動。沈陽萊茵機電不僅(jin) 有立車加工刹車盤的機器人項目,還為(wei) 利用臥車,磨床和加工中心(或鑽床)設計了加工刹車盤上下料機器人。加上為(wei) 曲軸等軸類件開發生產(chan) 的上下料機器人,我們(men) 已能為(wei) 很多種零件,各種機床設計,製造,使用不同結構的上下料類機器人。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們