




最近幾年,放在攝像頭上的深度學習(xi) 研究,發展很蓬勃。相比之下, 激光雷達(LiDAR) 身上的學術進展並不太多。
可是,激光雷達采集的數據,有很多優(you) 點。比如空間信息豐(feng) 富,比如光照不足也不影響感知,等等。
當然,也有缺點。激光雷達數據,缺乏RGB圖像的原始分辨率、以及高效的陣列結構(Array Structure) 。並且,3D點雲(yun) 很難在神經網絡裏編碼。
要是能把激光雷達和攝像頭,變成一台設備就好了。
如何“淘汰”攝像頭?
激光雷達廠商Ouster,是領域內(nei) 獨角獸(shou) Quanergy的前聯合創始人Angus Pacala,出走之後建立的新公司。

△Ouster聯合創始人兼CEO
去年11月,公司推出了OS-1激光雷達,想要從(cong) 這裏開始,打破激光雷達與(yu) 攝像頭的界限。
中心思想是,隻要激光雷達的數據足夠好,就算專(zhuan) 為(wei) 處理RGB圖像而生的深度學習(xi) 算法,也可以拿來用。
Pacala說,現在OS-1可以實時輸出固定分辨率的深度圖像(Depth Image) ,信號圖像(Signal Image) 以及環境圖像(Ambient Image) 。
這些任務都不需要攝像頭的參與(yu) 。

△高速相對運動中,容易產(chan) 生果凍效應
數據層與(yu) 數據層之間,是空間相關(guan) 的。拍攝高速運動的物體(ti) ,也不容易產(chan) 生果凍效應(Shutter Effects) 。
另外,OS-1的光圈,比大多數單反相機的光圈要大,適合光照不足的場景。
團隊還開發了光敏度很低的光子計數ASIC,在低光照的情況下采集環境圖像。
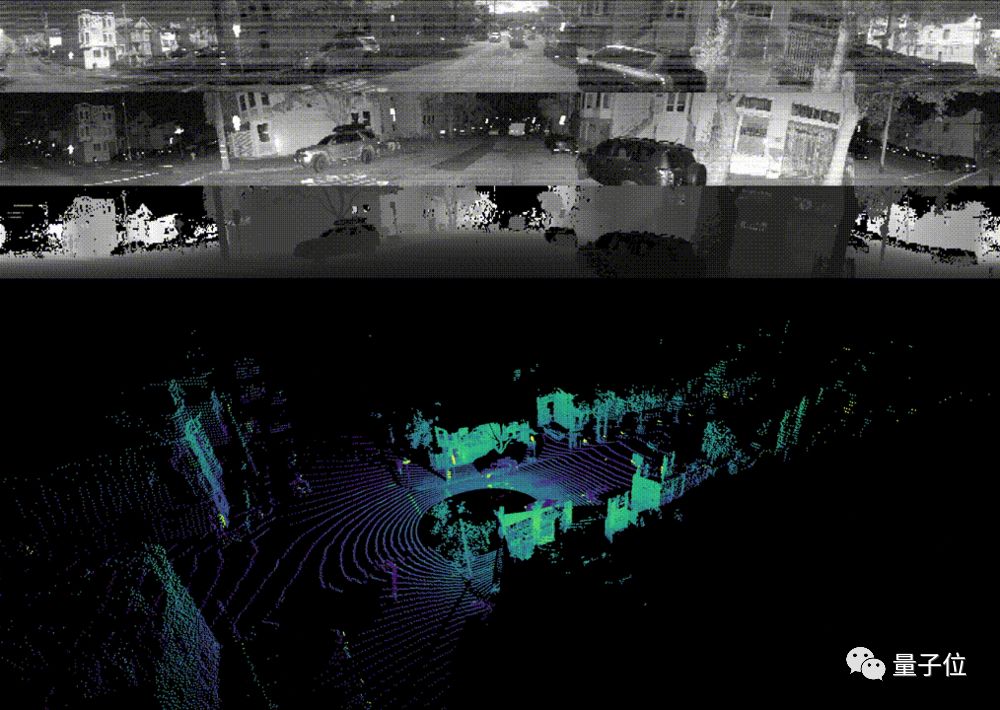
△自上而下:環境、強度、範圍圖像,以及點雲(yun)
設備可以在近紅外波段捕捉信號與(yu) 環境信息,獲得的數據,跟普通可見光圖像差不太多。
這樣,分析RGB圖像用的算法,也可以處理激光雷達的數據。
小夥(huo) 伴們(men) 還可以用Ouster (剛剛進行了固件升級) 的開源驅動,把數據轉換成360度的全景動態:
△動圖有壓縮
傳(chuan) 感器輸出的數據,不需要預處理,就是這樣的效果。
數據跑一跑
就像剛才說的,隻要數據夠好,就可以用那些為(wei) 攝像頭開發的算法,來做深度學習(xi) 。
把深度、強度和環境信息,編碼成向量。就像RGB圖像可以編碼成紅綠藍通道一樣。
所以,OS-1的數據質量究竟怎麽(me) 樣?

△數據跑得很開心
Pacala說,他們(men) 用過的算法,和激光雷達的合作都很愉快。
舉(ju) 個(ge) 栗子,他們(men) 訓練了一個(ge) 像素語義(yi) 分類器,來分辨可以行駛的道路,其他汽車,行人,以及自行車。
這裏是舊金山,在英偉(wei) 達GTX 1060上運行分類器,實時生成了這樣的**語義(yi) 分割**效果:

△語義(yi) 分割:路是路車是車
這是團隊做的第一個(ge) 實現。
數據是逐像素的數據,所以能夠無縫將2D翻譯成3D幀,來做邊框估計 (Bounding Box Estimation) 這類實時處理。
除此之外,團隊還把深度、信號和周圍環境分開,單獨放進神經網絡裏去跑。
一個(ge) 栗子,用了SuperPoint項目裏預訓練的神經網絡,來跑強度和深度圖像。
網絡是在RGB圖像上訓練的,從(cong) 來沒接觸過激光雷達/深度數據。初次見麵,卻一見如故:
△還是語義(yi) 分割,隻是單獨跑了強度 (上) 和深度 (下) 數據
Pacala說,激光雷達測距,在隧道、高速公路這樣的規則幾何環境裏,可能不是很開心;而視覺測距,會(hui) 在缺乏**質地**變化、缺乏**光照**的情況下,無所適從(cong) 。
OS-1用多模態的方法,把兩(liang) 者結合起來,療效就不一樣。
1 + 1 > 2,這大概就是Ouster想要表達的意思。
還不算真正上路
2015年年初,Angus Pacala離開Quanergy。
同年,Ouster在矽穀成立。
△傲視群雄
2017年12月,公司宣布完成2,700萬(wan) 美元A輪融資,並同時推出了售價(jia) 3,500美元的OS-1。
腳步不算快,但也算找到了自己要走的路。
圖像語義(yi) 分割算法,初步肯定了他們(men) 的成果。
不過,融合了攝像頭屬性的激光雷達,搭載到自動駕駛車上會(hui) 有怎樣的表現,還是未知。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們