




激光雷達技術產品種類繁多,性價比高,在我國眾多行業領域得到“大”規模應用,尤其是環境監測、電力、汽車、城市規劃、鐵路、林業、礦山、海岸線、考古等領域。隨著計算機技術、GPS和其自身技術發展和完善,激光雷達技術應用最近幾年受到了越來越多的重視。
激光雷達產(chan) 業(ye) 鏈拓撲圖
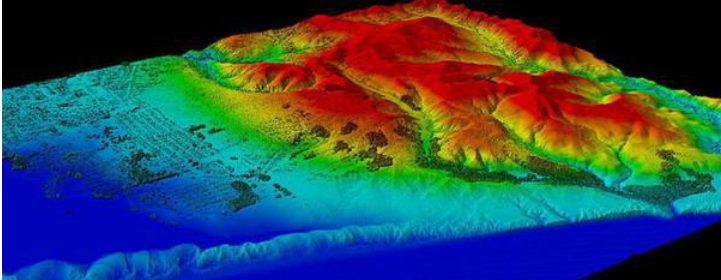
在三維建築模型中的應用
三維建築模型是“數字城市”發展的重要基礎信息之一,而激光雷達技術可以快速完成三維空間數據采集,應用前景廣闊。
搭載機載激光雷達係統通過無人機飛行可以快速完成地麵三維空間地理信息的采集,經過處理便可得到具有坐標信息的影像數據,再利用激光進行三維建築建模技術形成了三維地形模型。最後,為(wei) 了表達真實的城市麵貌對三維建築模型進行紋理貼圖,通過手動粘貼和紋理映射兩(liang) 種兩(liang) 種方法最終達到了反映城市現狀的目的。
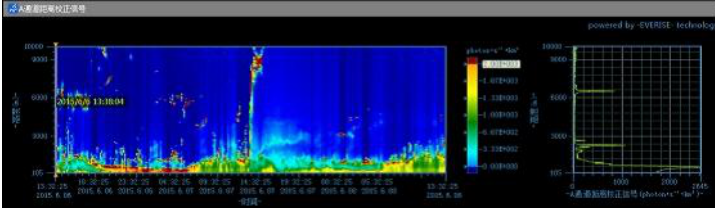
在大氣環境監測中的應用
利用激光雷達可以探測氣溶膠、雲(yun) 粒子的分布、大氣成分和風場的垂直廓線,對主要汙染源可以進行有效監控。當激光雷達發出的激光與(yu) 這些漂浮粒子發生作用時會(hui) 發生散射,而且入射光波長與(yu) 漂浮粒子的尺度為(wei) 同一數量級,散射係數與(yu) 波長的一次方成反比,米氏散射激光雷達依據這一性質對氣溶膠濃度、空間分布及能見度的測定,完成對大氣汙染物分布的觀測。
大氣探測成像圖
在油氣資源勘察中的應用
在油氣藏上方的近地表處,存在許多可用現有遙感手段捕捉到的烴類物質微滲漏異常信息,而且也存在著因油氣壓造成的烴類氣體(ti) 擴散異常現象。利用遙感直接探測油氣藏上方的烴類氣體(ti) 異常,是一種直接而快捷的油氣勘查方法,所采用的遙感技術,是目前己用於(yu) 大氣監測、氣體(ti) 化學分析等方麵的激光雷達技術。由於(yu) 激光雷達是激光技術與(yu) 雷達技術相結合的產(chan) 物,有著許多獨特的特性,並隨著這項技術的理論研究逐步深入和應用技術逐漸成熟和提高,將其用於(yu) 油氣直接勘查已成為(wei) 可能。可以預言,激光遙感的時代不久將到來。
在進行氣象研究中的應用
基於(yu) 電磁能量會(hui) 從(cong) 目標反射回來的檢測原理,激光雷達成為(wei) 氣象研究的一種非常重要的儀(yi) 器。斯坦福研究所開發的第一個(ge) 比較原始的儀(yi) 器設計清楚地表明了激光雷達的應用,如通過雨水或底層的雲(yun) 的結構探測雲(yun) 和霧層的位置,上升限度的高度。激光雷達回波可以清楚的從(cong) 低海拔地區觀察到一個(ge) 清晰的連續氣溶膠層,而這對於(yu) 肉眼來說是不可見。SRI Mark III的激光雷達,對稀薄的卷雲(yun) 的檢測展示了一個(ge) 更高的水平。它表明一個(ge) 很高的峰值功率可以穿透雲(yun) 層,同時形成反射。利用這種現象在不同海波高度觀察時就可以證明幾個(ge) 不同層的卷雲(yun) 的存在。
城市大氣汙染監測
在自動泊車技術中的應用
由於(yu) 城市擁擠、泊車位緊張,輔助駕駛係統發展迅速,自動泊車係統能輔助駕駛員進行泊車,減輕駕駛員操作強度,提高泊車的安全性,具有重要的研究意義(yi) 。自動泊車係統一般在汽車前後四周安裝感應器,這些感應器既可以充當發送器,也可以充當接收器。它們(men) 會(hui) 發送激光信號,當信號碰到車身周邊的障礙物時會(hui) 反射回來。然後,車載計算機會(hui) 利用其接收信號所需時間確定障礙物的位置。
目前的泊車係統多采用超聲測距儀(yi) 作為(wei) 車位檢測的傳(chuan) 感器,精度有限,且不能用於(yu) 垂直泊車。以智能車為(wei) 平台,設計並實現了基於(yu) 激光雷達的自動泊車係統,改進了泊車方法,可以安全順利的完成常見的路邊平行泊車及垂直泊車入庫任務。
在ACC主動巡航技術中的應用
汽車在行駛過程中,駕駛員可設定預期車速,係統基於(yu) 激光雷達的車輛跟蹤與(yu) 識別算法結合車輛矩形投影及速度特征識別車輛,得到前車的確切位置,如果發現前車減速或監測到新目標,係統就會(hui) 發送執行信號給發動機或製動係統來降低車速,使車輛和前車保持一個(ge) 安全的行駛距離。當前方道路沒車時又會(hui) 加速恢複到設定的車速,雷達係統會(hui) 自動監測下一個(ge) 目標。主動巡航控製係統代替司機控製車速,避免了頻繁地取消和設定巡航控製,使巡航係統適合於(yu) 更多的路況,為(wei) 駕駛者提供了一種更輕鬆的駕駛方式。
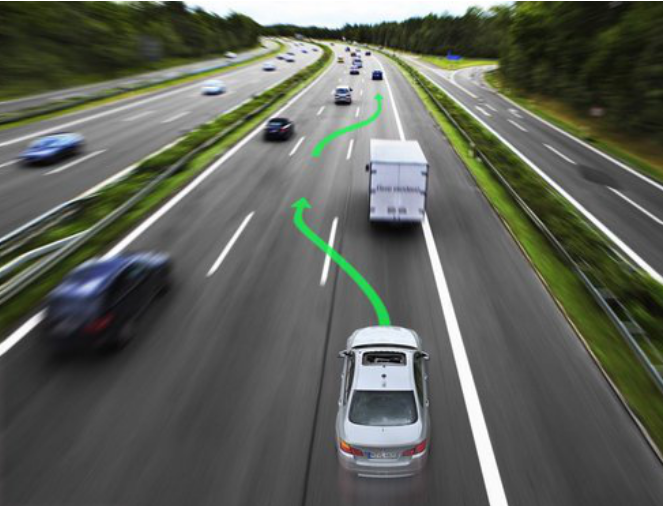
主動巡航係統可自動變道超車
在汽車自動刹車技術中的應用
高致死率的汽車交通事故推動了自動緊急製動係統發展。自動緊急製動係統的監測係統由一個(ge) 嵌入格柵的雷達、一個(ge) 安裝於(yu) 車內(nei) 後視鏡前端的攝像頭及一個(ge) 中央控製器組成。雷達監測汽車前方的物體(ti) 和距離,而攝像頭探測物體(ti) 類型。高清攝像頭監測行人和自行車運動軌跡。中央控製控製器監測全局信息並分析交通狀況。當出現狀況時發出警示信號提醒司機,若司機未能及時做出反應,係統也將強製控製車輛製動。
在無人自駕技術中的應用
無人自駕汽車時代已經來臨(lin) 。“環境感知+導航定位”造就激光雷達的核心地位。其名為(wei) “激光雷達係統”在車頂安裝四個(ge) 可旋轉激光雷達傳(chuan) 感器,持續向四周發射微弱激光束,從(cong) 而實時勾勒出汽車周圍360度3D街景,同時結合360攝像頭以幫助汽車觀察周圍環境,係統將收集到的信息進行分析,區分恒定不變的固體(ti) (車道分隔,出口坡道,公園長椅等)以及不斷移動的物體(ti) (受驚的小鹿,行人,迎麵而來的車輛等),並將所有的數據都匯總在一起,再根據密歇根大學開發的算法判斷周圍環境,從(cong) 而做出相應的反應。

激光雷達技術應用於(yu) 無人駕駛汽車
在車模快速成型技術中的應用
激光雷達掃描係統的快速成型技術主要應用於(yu) 樣件汽車模型的製作和模具的開發,這項技術能夠較大的縮短新產(chan) 品的開發周期,降低了開發的成本,,並且能夠使新產(chan) 品的市場競爭(zheng) 力得到了提高。還能夠應用在汽車的零部件上,多用於(yu) 分析和檢驗加工的工藝性能、裝配性能、相關(guan) 的工裝模具以及測試運動特性、風洞實驗和表達有限元分析結果的實體(ti) 等。利用激光雷達的非接觸式測量、高精度、檢測速度快等特點,在汽車車身的三維檢測和開發設計過程中,激光雷達得到了廣泛的應用。利用激光雷達測量得到車身的點雲(yun) 數據,對車身進行逆向設計,將點雲(yun) 數據進行預處理,然後進行曲線、曲麵、實體(ti) 模型的重構,最終實現車身模型重現的目的。

車模快速成型
在智能交通信號控製中的應用
在城市重要交通路口信號控製係統中集成一個(ge) 地麵三維激光掃描係統,通過激光掃描儀(yi) 對一定距離的道路進行連續掃描,獲得這段道路上實時、動態的車流量點雲(yun) 數據,通過數據處理獲得車流量等參數,根據對東(dong) 西向和南北向車流量大小的比較以及短暫車流量預測,從(cong) 而自動調節東(dong) 西向和南北向信號燈周期。

智能交通信號控製
在交通事故勘察中的應用
運用三維激光掃描儀(yi) 對事故現場進行三維掃描,現場取證,掃描儀(yi) 的數據能夠生成事故現場的高質量圖像和細節示意圖,便於(yu) 後期提取調查和法庭審理。調查表明,用三維激光掃描儀(yi) 采集事故現場數據平均每次減少90分鍾的道路封閉時間。
激光雷達技術有著這麽(me) 廣闊的應用市場,致使國內(nei) 眾(zhong) 多企業(ye) 紛紛涉足其中。國內(nei) 主要激光雷達廠商(如下表格)。
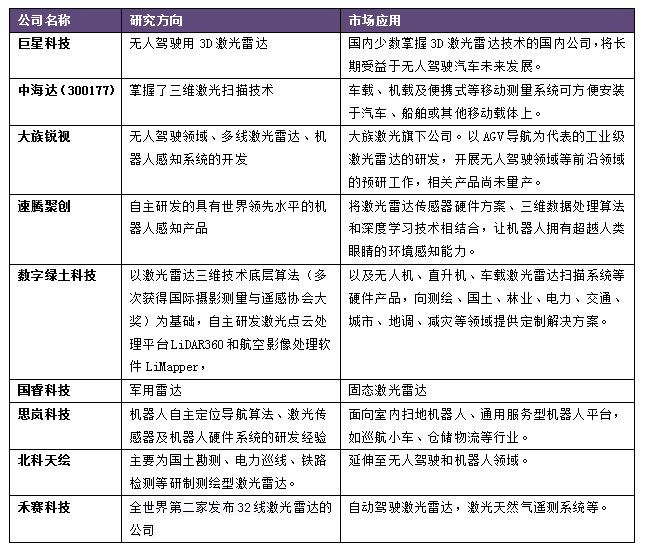
(數據來源:Laser Manufacture News)

安裝激光雷達的汽車
根據Laser Manufacture News最新報告顯示,得益於(yu) 無人駕駛汽車市場規模的爆發,預計2020年全球激光雷達市場可“上”100億(yi) 的市場規模。我們(men) 有理由相信,激光雷達一定會(hui) 以高、大、上的姿態在我國“數字城市”、大氣環境監測檢測、油田勘探、城市智能交通、無人駕駛等領域發揮重要作用,特別是未來的無人駕駛汽車領域。
在《汽車產(chan) 業(ye) 中長期發展規劃》中提出:突破車用傳(chuan) 感器等先進汽車電子的產(chan) 業(ye) 鏈短板,培育具有國際競爭(zheng) 力的零部件供應商,著力推動智能網聯汽車關(guan) 鍵零部件研發,重點支持傳(chuan) 感器等核心技術研發及產(chan) 業(ye) 化。
激光+雷達的“春天”來了。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們