




[
為普及激光雷達對於自動駕駛係統的重要性,近日全球激光雷達龍頭企業Velodyne在其官方網站發布了三篇關於自動駕駛傳感器的博客,《高工智能汽車》從中摘錄了一部分如下:
情境意識是良好駕駛的關鍵。為了將汽車導航到期望的目的地,司機需要知道自己的位置並實時觀察周圍環境。
這些觀察允許駕駛員本能地采取行動,例如加速或刹車、改變車道、合並到公路上、繞過障礙物和物體進行機動。
完全自動駕駛的車輛(AV)的工作方式基本相同,隻是它們使用傳感器和GPS技術來感知環境並規劃通往期望目的地的路徑。
這些技術共同工作,以確定汽車所在的位置和正確的路線。他們不斷地確定汽車周圍發生的事情,定位車輛附近的人和物體的位置,並評估其運動的速度和方向。
這種持續的信息流被輸入到汽車的車載計算機係統中,這決定了在周圍環境中安全導航的最安全方式。
自動駕駛車輛利用高清晰地圖引導汽車導航係統。最新發展目標是實時生成和更新這些地圖。雖然這仍然是一項正在進行中的工作,但這是必要的,因為我們的道路條件不是靜態的。
擁擠、事故和建築使我們的街道和公路上的現實生活變得複雜起來。車載傳感技術,如激光雷達、攝像頭和毫米波雷達,實時感知環境以提供這些不斷變化的道路狀況的準確數據。
這些傳感器產生的實時地圖通常非常詳細,包括道路車道、路麵邊緣、路肩、分隔線和其他關鍵信息。這些地圖包括附加信息,如路燈、電線杆和交通標誌的位置。
車輛必須意識到這些特征,才能安全地行駛在道路上。
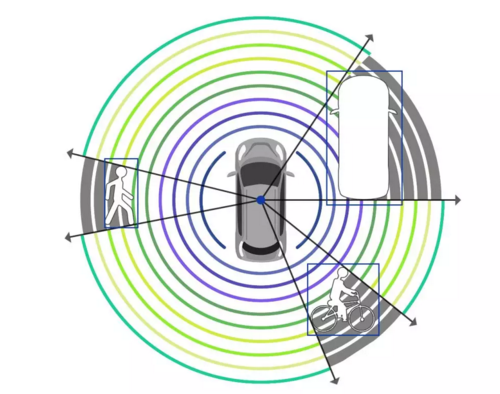
傳感技術解決了其他關鍵的驅動要求。例如,激光雷達能夠使車輛具有360°的視野,因此在運行時可以看到車輛周圍的整個環境。
傳感器技術為車載計算機提供了檢測和識別諸如車輛、自行車、動物和行人等物體所需的數據。這些數據還允許車輛的計算機測量這些物體的位置、速度和軌跡。
在自動駕駛車輛檢測物體方麵的典型的例子就是高速公路上的危險輪胎碎片。這個例子經常被引用,因為它會給所有的傳感器帶來麻煩。
輪胎碎片通常不夠大,無法從遠處輕易地被發現,並且它們通常與路麵顏色相同。傳感器技術必須具有足夠高的分辨率來準確地檢測碎片位置。這需要將輪胎與道路瀝青分開,並確定它是靜止的物體(而不是像小動物那樣移動的物體)。
在這種情況下,車輛不僅需要檢測物體,而且還將其分類為輪胎碎片,這是必須避免的。然後,車輛必須確定正確的行動路線,如改變車道以避免輪胎碎片同時不撞到另一車輛或物體。
為了給車輛足夠的時間來改變它的路徑和速度,這些步驟都必須在不到一秒鍾的時間內發生。同樣,車輛車載計算機做出的這些決策依賴於車輛傳感器提供的精確數據。
在所有的傳感器中,目前激光雷達被認為是必須的傳感器。它以極高的速率反射周圍物體的光,每秒產生數百萬個激光脈衝。通過測量每個脈衝“彈離”物體並返回到傳感器所需的時間,並將這一時間乘以光速,可以計算物體的距離。
同時,以極高的速率收集這些距離數據會產生“點雲”,或者傳感器周圍環境的3D表示,在地圖上精確地定位車輛――在厘米以內。
目前,全球各地的激光雷達廠商提出了多種技術路線,在這些方法中,都有著相同的性能指標用於判斷激光雷達是否能夠適用於自動駕駛車輛。
最關鍵的指標包括:視場角、測距範圍、分辨率、旋轉速度/幀速率。
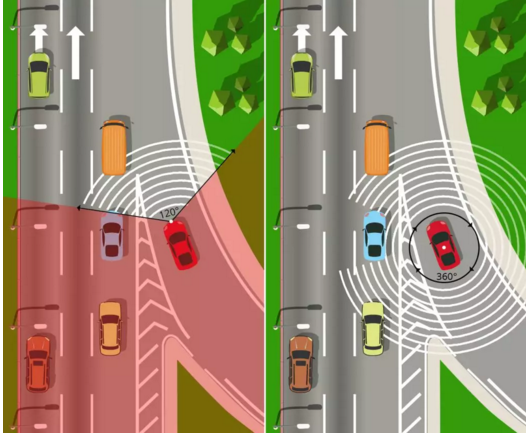
視場角。人們普遍認為,360°水平視場――對於人類駕駛員來說不可能――但對於自動駕駛車輛的安全運行是最佳的。
例如,我們可以在高速公路上進行高速合並車道的場景。自動駕駛車輛前方對角觀看另一輛車是否在相鄰車道上行駛。這也需要大致垂直於車輛當前行駛位置的視圖,以評估相鄰車道上的車輛,並確認有並道的空間。
在整個過程中,車輛必須向前看,這樣就可以在前方進行交通協商。由於這些原因,一個狹窄的視場將不足以使車輛安全地執行並道動作。
因此,旋轉激光雷達傳感器對於這些應用是最佳的,因為能夠捕獲完整的360度視圖。
相比之下,如果自動駕駛車輛采用有限水平視野的傳感器,則需要更多的傳感器,並且車輛的計算機係統必須隨後將這些各種傳感器收集的數據拚接在一起。
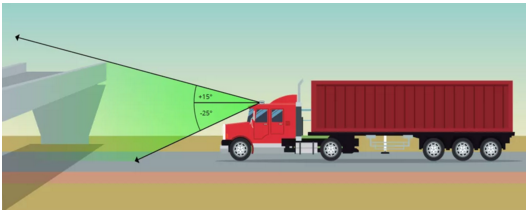
垂直視野是另一個重要的性能指標,激光雷達的能力與現實生活的駕駛需求相匹配。LiDAR需要看到道路以識別可駕駛區域,避免物體和碎片在其車道上,並在需要時改變車道或在十字路口轉彎。
自動駕駛車輛也需要激光雷達(LiDAR)光束,該光束指向足夠高的地方,以探測高大的物體、路標、懸垂物,以及上下坡道。
測距範圍。這對於激光雷達來說一直是一個重要話題,自動駕駛車輛需要盡可能地向前看,以優化安全性。在高速公路上,200米的最小測距範圍允許車輛在最短時間對變化的道路條件和環境作出反應。
低速場景,則允許傳感器具有更短的距離,但是車輛仍然需要對道路上的意外事件做出快速反應。
在每種情況下,車載傳感器需要足夠的距離給車輛足夠的時間來檢測人或物體,分類它是什麽,確定它是否移動和如何移動,然後采取步驟避免它同時不撞到另一輛車或物體。
另一個與測距範圍相關的因素是反射率。影響物體表麵反射率的因素主要有物體表麵顏色和表麵類型(亞光,高亮,平滑,粗糙等)。
我們通常定義柯達白板(Kodak white material)的表麵反射率為100%,因此根據這一定義光亮表麵的反射率一般會大於100%。
淺色物體比暗物體反射更多的光。雖然許多傳感器能夠在遠距離檢測具有高反射率的物體,但是能夠檢測遠距離低反射率物體的傳感器要少得多。
分辨率。高分辨率激光雷達在所有速度下都是物體檢測和防撞的關鍵。更精確的分辨率允許傳感器更精確地確定物體的大小、形狀和位置,而最先進的激光雷達傳感器能夠檢測3厘米內的物體,有些可以接近到2厘米。
這種更精細的分辨率甚至優於高分辨率毫米波雷達,並為車輛提供了最清晰的道路視覺。
為了檢驗分辨率的重要性,我們可以考慮道路上輪胎碎片的例子。LiDAR係統不僅需要能夠檢測出物體,而且需要識別出它是什麽。
考慮到它需要檢測黑暗表麵上的黑色物體,因此具有較高分辨率的傳感器提高了車輛準確檢測和分類的能力。
此外,為了幫助對道路狀況作出技術反應,與攝像頭不同,LiDAR提供環境的3D圖像,其中包括物體離車輛多遠的精確測量。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們