





近年來,隨著現代製造業(ye) 的蓬勃發展,焊接工作由傳(chuan) 統的人工操作邁向自動化,焊接機器人的應用愈發廣泛。隨著自動化焊接在船舶重工、汽車及零配件、石油天然氣管道、核電、航天軍(jun) 工等高新領域的應用不斷擴大,工件焊接精度的要求也在不斷提升。
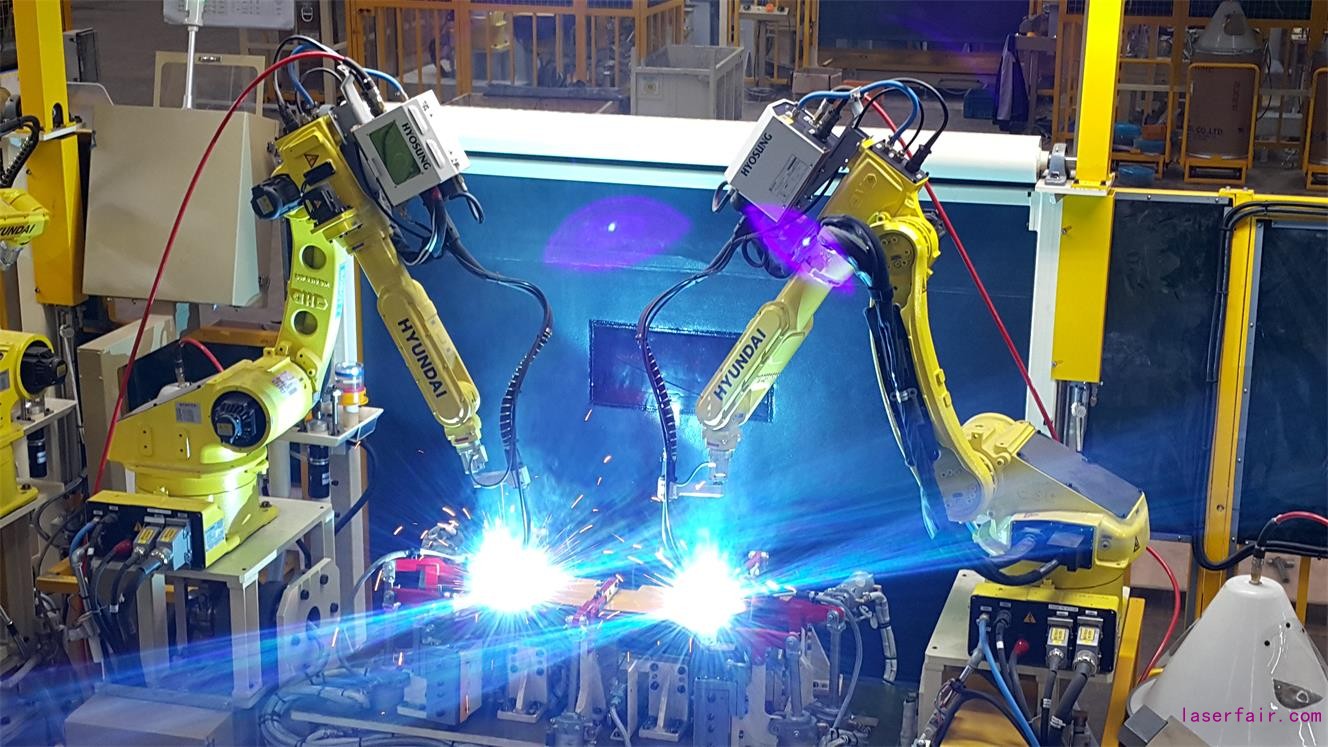
哈工現代機器人焊接現場
一般焊接機器人在工作過程中主要采用“示教—再現”的模式,焊接的路徑需要提前在機器人中設定,後續機器人按照設定的軌跡進行焊接,重複精度高,焊接效率大大提高。但是,由於(yu) 焊接過程中的熱變型以及工裝夾具定位偏差等影響,經常會(hui) 發生實際焊接路徑和示教軌跡發生不符的狀況,降低了焊接精度及效率,嚴(yan) 重時可能導致焊接失敗、工件報廢。
大部分工廠在麵對這一問題時,普遍采用提高工裝夾具的精度,增加機器人示教的軌跡數量和頻率等方案,但由於(yu) 成本高,可重複利用性低,使得該解決(jue) 方案性價(jia) 比較低;傳(chuan) 統的機器視覺在工業(ye) 上已經得到了大量應用,但焊接工業(ye) 現場惡劣的環境以及電弧的強烈幹擾等因素,使得該技術也無法運用。如何提升焊接精度,成為(wei) 焊接領域的國際性難題。
針對這一問題,江蘇哈工智能機器人股份有限公司(簡稱:哈工智能)旗下子公司哈工現代聯合蘇州睿牛機器人技術有限公司(簡稱:蘇州睿牛)采用哈工現代機器人HA006B搭載睿牛激光焊縫跟蹤傳(chuan) 感器進行普通碳鋼的試焊實驗,采集數據,全方位跟蹤焊接效果,深度挖掘最佳解決(jue) 方案。
哈工現代HA006B適用於(yu) 高節拍的精密工業(ye) 生產(chan) 需求,可通過修改程序和運行路徑以適應不同工件的生產(chan) ,更新機種時隻需更新產(chan) 品工藝要求和人員設備配置,即可快速更改行動路徑,大大縮短工件產(chan) 品改型換代的周期,降低相應的傳(chuan) 統流水線設備投資,滿足未來生產(chan) 線多批次、小批量的多樣化生產(chan) 要求。

哈工現代機器人HA006B
本次試焊實驗將激光焊縫跟蹤傳(chuan) 感器前置於(yu) HA006B焊接頭處,即時采集焊縫的形態,再通過軟件算法得出焊接目標點的真實位置,將數據實時傳(chuan) 送至機器人,引導機器人在真實軌跡上進行焊接,完成指定焊接動作,避免焊接質量偏差,提升工件焊接效果及工作效率,從(cong) 而實現無人化焊接。

睿牛激光焊縫跟蹤傳(chuan) 感器
實驗數據顯示,搭載激光焊縫跟蹤傳(chuan) 感器的HA006B進行弧焊作業(ye) 時,在焊接搭接、角接、單邊、拚接、圓形拚接等多種焊縫類型時一致性強,焊接效果美觀,極大程度上解決(jue) 了實際焊接路徑和示教軌跡發生不符的難題。
哈工智能旗下子公司哈工現代與(yu) 蘇州睿牛的通力合作,不僅(jin) 打開了雙方合作共贏的利好局麵,同時,也為(wei) 客戶提供了新的焊接選擇。技術發展,道阻且長。哈工現代將繼續聯合蘇州睿牛鑽研焊接難題,推動行業(ye) 新發展。
未來,哈工現代將一如既往地堅持“配置靈活 預算可達 售後無憂”的企業(ye) 使命,立足客戶需求,深度探索行業(ye) 痛點,以機器人為(wei) 核心,融合技術、產(chan) 品、服務,全力為(wei) 客戶提供智能製造解決(jue) 方案,以豐(feng) 富的經驗更好地服務客戶,提升企業(ye) 生產(chan) 效率與(yu) 經濟效益。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀


















 關注我們
關注我們