






1 引言
plc輸出的集成脈衝(chong) 可通過步進電機進行定位控製。關(guan) 於(yu) 定位控製,調節和控製操作之間存在一些區別。步進電機不需要連續的位置控製,而在控製操作中得到應用。在以下的程序例子中,借助於(yu) cpu214所產(chan) 生的集成脈衝(chong) 輸出,通過步進電機來實現相對的位置控製。雖然這種類型的定位控製不需要參考點,本例還是粗略地描述了確定參考點的簡單步驟。因為(wei) 實際上它總是相對一根軸確定一個(ge) 固定的參考點,因此,用戶借助於(yu) 一個(ge) 輸入字節的對偶碼(dual coding)給cpu指定定位角度。用戶程序根據該碼計算出所需的定位步數,再由cpu輸出相關(guan) 個(ge) 數的控製脈衝(chong) 。
2 係統結構
如圖1所示。
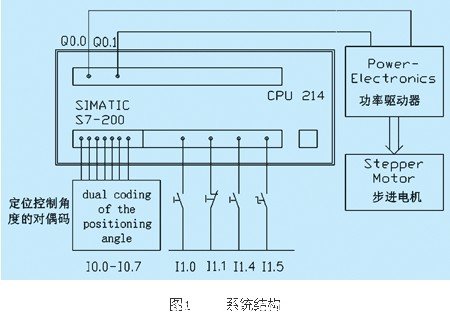
3 硬件配置
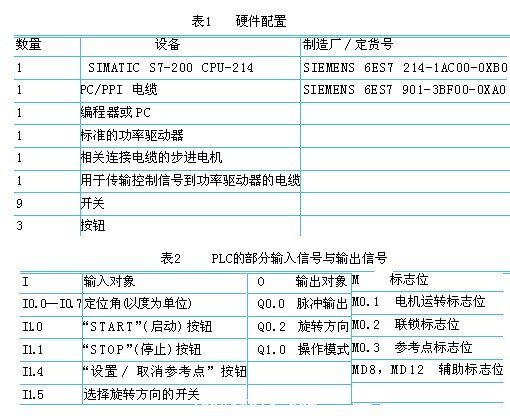
如表1所示。
4 軟件結構
4.1 plc的輸入信號與(yu) 輸出信號
plc的部分輸入信號與(yu) 輸出信號,以及標誌位如表2所示。
4.2 係統軟件設計
plc的程序框圖如圖2所示。
#p#分頁標題#e#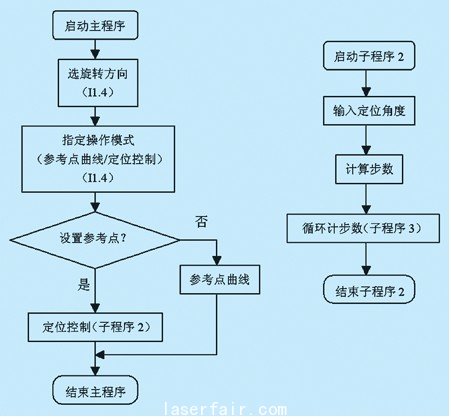
4.3 初始化
在程序的第一個(ge) 掃描周期(sm0.1=1),初始化重要參數。選擇旋轉方向和解除聯鎖。
4.4 設置和取消參考點
如果還沒有確定參考點,那麽(me) 參考點曲線應從(cong) 按“start”按扭(i1.0)開始。cpu有可能輸出最大數量的控製脈衝(chong) 。在所需的參考點,按“設置/取消參考點”開關(guan) (i1.4)後,首先調用停止電機的子程序。然後,將參考點標誌位m0.3置成1,再把新的操作模式“定位控製激活”顯示在輸出端q1.0。
如果i1.4的開關(guan) 已激活,而且“定位控製”也被激活(m0.3=1),則切換到“參考點曲線”參考點曲線。在子程序1中,將m0.3置成0,並取消“定位控製激活”的顯示(q1.0=0)。此外,控製還為(wei) 輸出最大數量的控製脈衝(chong) 做準備。當再次激活i1.4開關(guan) ,便在兩(liang) 個(ge) 模式之間切換。如果此信號產(chan) 生,同時電機在運轉,那麽(me) 電機就自動停止。
實際上,一個(ge) 與(yu) 驅動器連接的參考點開關(guan) 將代替手動操作切換開關(guan) 的使用,所以,參考點標誌能解決(jue) 模式切換。
4.5 定位控製
如果確定了一個(ge) 參考點(m0.3=1)而且沒有聯鎖,那麽(me) 就執行相對的定位控製。在子程序2中,控製器從(cong) 輸入字節ibo讀出對偶碼方式的定位角度後,再存入字節mb11。與(yu) 此角度有關(guan) 的脈衝(chong) 數,根據下麵的公式計算:
n=φ/360°×s
式中:n-控製脈衝(chong) 數
φ-旋轉角度#p#分頁標題#e#
s-每轉所需的步數
該程序所使用的步進電機采用半步操作方式(s=1000)。在子程序3中循環計算步數,如果現在按“start”按鈕(i1.0),cpu將從(cong) 輸出端q0.0輸出所計算的控製脈衝(chong) 個(ge) 數,而且電機將根據相應的步數來轉動,並在內(nei) 部將“電機轉動”的標誌位m0.1置成1。
在完整的脈衝(chong) 輸出之後,執行中斷程序0,此程序將m0.1置成0,以便能夠再次起動電機。
4.6 停止電機
按“stop”(停止)按扭(i1.1),可在任何時候停止電機。執行子程序0中與(yu) 此有關(guan) 的指令。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀






















 關注我們
關注我們