




1 引言(Introduction)
激光焊接作為(wei) 新的焊接工藝方法在汽車製造領域有大量成功的應用,顯示出激光焊接強大的生命力和非常廣闊的應用前景.采用並聯機構可以進一步提高機器人的負載/自重比,改善機器人的運動特性,使其結構更加靈巧.利用並聯機構剛度大、運動慣性小、精度高等優(you) 點,實現高精度激光焊接加工,這是並聯機器人技術向激光焊接領域的拓展.
傳(chuan) 統的數控加工軌跡控製概念都建立在笛卡兒(er) 坐標係中,而並聯機器人的軌跡控製是由若幹杆件的空間運動綜合而成的,若使機器人加工末端點實現所需要的運動,則必須在兩(liang) 者之間進行坐標轉換.另外,並聯機器人的結構和配置形式的多樣化使傳(chuan) 統數控的封閉式結構不能滿足其需求,因此並聯機器人的控製係統必須是開放式結構.
本項目研製的並聯機器人控製係統是以Linux 24.20+實時內(nei) 核RTLinux3.1作為(wei) 實時軟件平台的全軟件開放式數控係統,該係統以C語言為(wei) 編程語言編製數控係統軟件.由於(yu) 引入了實時多任務機製,采用開放式的結構框架,因此它可以實現特殊機構構型並聯機器人的高速、高精度控製.該係統適用於(yu) 激光焊接、切割等對精度要求較高的加工應用,其關(guan) 鍵難點技術的研究突破,對於(yu) 進一步開發激光焊接並聯機器人係統並實現其產(chan) 業(ye) 化具有重要意義(yi) .
2 係統組成(Components of the system)
並聯機器人數控係統是一個(ge) 實時多任務軟件係統,它可以分為(wei) 實時任務層和非實時任務層兩(liang) 層.實時任務層包括插補計算模塊、位姿正反解模塊、速度處理模塊、電機控製模塊、軟PLC模塊、故障診斷及處理模塊等直接與(yu) 數控加工相關(guan) 的、對實時性要求較高的功能模塊,此層由RTLinux 實時子係統來處理;除此之外,對實時性要求不高的功能模塊,如人機交互模塊、參數配置模塊、代碼解釋模塊、加工模擬模塊、文件管理模塊等,為(wei) 非實時任務層,由普通Linux內(nei) 核控製,數控係統軟件功能結構如圖1所示.這樣分層的好處是使實時任務和非實時任務運行在不同的進程空間,便於(yu) 保證係統的實時性,係統層次分明,增強了開放性和靈活性,可以適應多種實際應用.
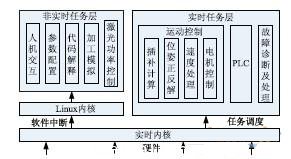
圖1 數控係統軟件結構
本數控係統以Linux2.4.20 + RTLinux3.1為(wei) 操作係統,PC機為(wei) 平台,上述的各種功能均由軟件完成,與(yu) 外部伺服相連接的軸控製卡隻是將PC機的數字量轉換以後輸出給伺服係統,並將外部的反饋信息送入PC機,並不進行任何的計算.數控係統硬件結構如圖2所示.
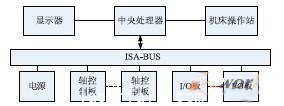
圖2 數控係統硬件結構
3 位置正反解模塊的實現(Realization of the forward and inverse displacement modules)
上述功能中,不同於(yu) 傳(chuan) 統數控係統之處在於(yu) 係統中需要根據機械結構實際的機構模型嵌入特定的位姿正反解模型.因此,建立正確的正反解模型至關(guan) 重要.
3.1 建立正反解幾何模型
機器人機構簡圖如圖3所示,在本文所述的機構中,將光軸位姿參數(虛軸坐標)換算到驅動坐標位置(實軸坐標)稱為(wei) 反解運算.
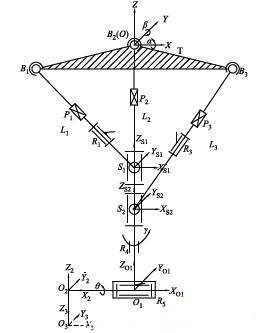
圖3 機器人機構簡圖
設定L2分支中繞X 軸旋轉虎克鉸的旋轉角度為(wei) α,繞Y軸旋轉虎克鉸的旋轉角度為(wei) β,3個(ge) 分支的杆長分別為(wei) L1、L2、L3,串聯關(guan) 節回轉轉動副和俯仰轉動副的轉角分別為(wei) γ和θ ,則由位姿坐標變換可得到:
 (1)
(1)
已知機器人末端執行器相對於(yu) 固定參考坐標係O-XYZ 的位姿矩陣:
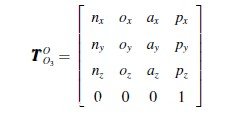 (2)
(2)
求解此矩陣方程可得α、β 、γ 、θ 、.
根據求解得到的α、β 和L2,將Ts2O 和TO1O求解出來.得到S2和O1在固定參考坐標係O-XYZ 中的坐標,則得到下式:

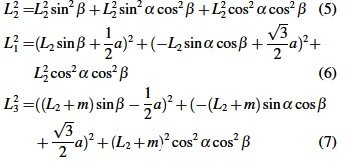
在固定平台OB1B3中,OB1B3 為(wei) 已知三角形,則很容易得到其他兩(liang) 杆長度為(wei) :
 (4)
(4)
正解過程與(yu) 反解過程正好相反:已知機器人的關(guan) 節變量L1、L2、L3和γ 、θ ,求解機器人末端位姿矩陣.
根據關(guan) 節變量L1、L2和L3 ,以及B1、O、B3 點坐標,列距離方程可以求解到L2分支繞X 軸和繞Y軸的旋轉角度α和β .其求解方程如下:
根據得到的α和β ,將已知的L2、γ 、θ 代入到位姿變化矩陣,即可將機器人的末端位姿矩陣求解出來,完成運動學正解.
3.2 正反解多解問題
在求解並聯機器人正反解方程的過程中存在方程多解問題:在正解計算中一組實軸坐標對應兩(liang) 組虛軸坐標,其中有一組虛軸坐標位於(yu) 靜平台(平麵)上方,可舍去;在反解計算中一組虛軸坐標對應兩(liang) 組實軸坐標,由於(yu) 本係統具有驅動軸(實軸)單軸手動功能,如果直接舍去反解計算的一組實軸解,會(hui) 造成手自動切換時係統伺服軸跟隨誤差出界.產(chan) 生這種情況的原因是:實軸在單軸手動時可能進入被舍棄的實軸解空間,而實軸單軸手動時係統是不進行反解計算的,因此不會(hui) 發生報警事件;而在切換到自動狀態時反解生效,但實軸解為(wei) 另一組解,由於(yu) 理論值與(yu) 實際值相差很大,造成跟隨誤差出界報警(如圖4 所示).
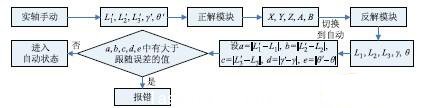
圖4 手自動切換過程示意圖
為(wei) 了解決(jue) 反解多解問題,在反解模塊中引入變量來讀取實軸實時坐標(),將其與(yu) 反解計算值() 進行比較,取最接近實軸實時坐標的那組解作為(wei) 輸出,經過處理後驅動實軸運動.為(wei) 了節省運算時間,此判斷過程隻在實軸單軸手動切換到自動狀態時生效,判斷過後一直采用選中的那組解的解析表達式計算實軸坐標,直到下次切換.
3.3 旋轉軸“過零”問題
第4 軸(旋轉軸)在經過0°點時,會(hui) 出現突然反轉現象:在並聯機器人作加工時,在某些位置需要從(cong) 359.999°運動到0.001°,加工過程隻需要旋轉軸運動0.002°,而實際情況是旋轉軸轉動大弧359.998°,產(chan) 生這種現象的原因是係統將旋轉軸當作線性軸來處理,而反解計算隻能計算0°到360°的半閉半開區間,旋轉軸到360°就會(hui) 歸零.這是加工所不需要的,係統也不可能在一個(ge) 插補周期內(nei) 完成一周的轉動.#p#分頁標題#e#
為(wei) 解決(jue) 此問題,將第4 軸反解計算值與(yu) 當前實時坐標相減,然後按下式修正計算值:
 (8)
(8)
式中為(wei) 修正後的第4軸坐標,為(wei) 修正前的第4軸坐標計算值,為(wei) 第4軸的當前實時坐標,| |為(wei) 向上取整符號.
3.4 加工曲線生成問題
對於(yu) 5 自由度加工,人工編程有很大難度,而現有的計算機輔助製造(CAM)軟件沒有針對並聯機構的模塊.為(wei) 利用現有的CAM 軟件進行加工編程,在位姿正反解模塊中加入轉換模塊,將CAM 中給定的結構和正反解輸入輸出坐標相互轉化.操作者可根據不同的CAM 軟件定製不同的轉換模塊.
以UG的五軸雙擺頭結構X、Y 、Z、A、B為(wei) 例說明轉換模塊的轉換過程.首先,為(wei) 簡化轉換過程,將第4、第5軸偏置設為(wei) 0,這樣UG在轉換時就不考慮刀長,那麽(me) UG 輸出代碼中的X、Y 、Z與(yu) 並聯結構的需求一致,不需要再作轉換.我們(men) 隻需要對刀軸姿態進行轉換:設單位刀軸矢量在X 軸的投影
為(wei) I、在Y軸的投影為(wei) J、在Z 軸的投影為(wei) K,A為(wei) 主擺角,B為(wei) 副擺角,刀具軸在Z軸上,通過數學推導可得出反解模塊的刀軸矢量和A、B的關(guan) 係如下(式中i、j、k依次為(wei) 矢量I、J、K的模,A、B依次為(wei) 轉角A、B的角度值):
 (9)
(9)
同樣可得出正解模塊的轉換關(guan) 係為(wei) :

4 插補算法的設計(Design of the interpolationalgorithm)
用並聯機器人進行激光加工主要是控製激光焦點的運動,並保持激光處於(yu) 工件當前加工點的法線方向.並聯機器人是由複雜的空間機構組成的,激光光軸位姿參數與(yu) 控製係統驅動坐標位置之間需要經過坐標變換,從(cong) 而獲得控製所需的幾何描述.因此,並聯機器人的插補方式與(yu) 傳(chuan) 統數控也有所不同.
本係統插補計算將機構末端的運動軌跡離散為(wei) 一係列首尾相接的小線段:給定一個(ge) 插補周期(作為(wei) 係統參數,用戶可設定),按照指令中給出的軌跡進給速度,單獨計算各軸方向上的位移增量,將連續的軌跡離散為(wei) 若幹離散點序列,然後應用S型加減速算法,對插補步長進行修正.利用反解模塊將插補生成的離散點映射到關(guan) 節空間,係統根據反解模塊計算結果驅動伺服電機運動.
5 激光工藝模塊設計及實現(Design and realizationof the laser processing module)
並聯激光加工數控係統還要包括激光工藝模塊,該模塊用於(yu) 設置和調整激光加工工藝參數,包括激光功率控製、離焦量控製、偏距控製、激光器狀態等
參數,如圖5 所示.
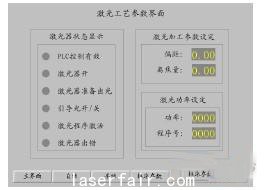
圖5 激光加工參數界麵
激光功率設定參數是通過軸控製板發送給激光器的,激光器將此參數作為(wei) 輸出功率曲線的幅值.離焦量是指焦平麵與(yu) 被焊工件上表麵的距離,這裏將離焦量作為(wei) 激光焦點和第5軸旋轉中心距離的修正參數,傳(chuan) 遞給正反解模塊.光束中心偏離加工軌跡的距離叫偏距,偏距設置用於(yu) XY 、YZ、ZX平麵加工.這裏規定光束中心在加工軌跡右側(ce) 偏距為(wei) 正值,左側(ce) 為(wei) 負值.
6 實驗與(yu) 結論(Experiment and conclusion)
使用便攜式三坐標測量機對並聯機器人末端精度進行檢測.並聯機器人末端由(0;400;0;0;0) 沿直線運動到(1000;400;0;0;0),測出誤差如圖6 所示(圖中橫坐標為(wei) X 軸位置坐標,縱坐標依次為(wei) X、Y 、Z軸位置誤差和單位激光光軸矢量在X軸的投影I、在Y 軸的投影J、在Z 軸的投影K 的差).
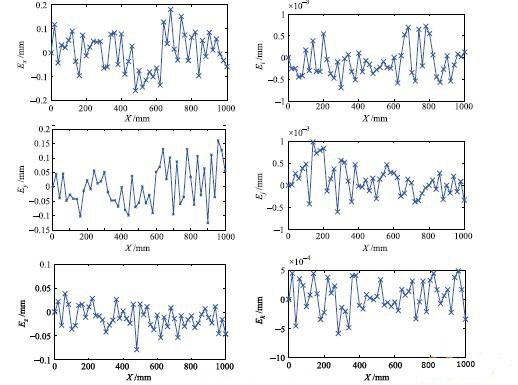
圖6 並聯機器人位姿誤差曲線
並聯機器人具有機械結構簡單、控製係統複雜的特點,需要根據不同的結構形式設計不同的控製係統.本係統的開放式設計可提高開發效率,降低開發成本,使並聯數控係統的開發、維護和推廣變得更加容易.實驗證明本文開發的基於(yu) RTLinux 的五自由度並聯激光焊接數控係統性能達到了激光焊接的實際應用要求.
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們