




據日經BP社報道,“2014年底特律第21屆ITS世界大會(hui) ”於(yu) 2014年9月7日在美國密歇根州開幕。開幕之前,豐(feng) 田公布了用於(yu) 輔助安全駕駛的自動駕駛係統及其關(guan) 鍵技術的開發進展情況。自動駕駛係統將於(yu) 2015年以後在美國實現商品化。
豐(feng) 田在日本國內(nei) 實施AHDA試驗時的畫麵(圖片截自該公司公開的視頻)
此次公開的自動駕駛係統為(wei) 豐(feng) 田版高級駕駛輔助係統(ADAS)——自動高速公路駕駛輔助係統(AHDA)的新版。新版AHDA根據美國公路的實際環境進行了改進,可達到時速70英裏(約110km/h)。主要采用了三項技術輔助駕駛員駕駛,在高速公路上安全地保持車道和車間距離。與(yu) 2013年展出的版本不同,此次未配備車車間通信技術。
此次采用的三項關(guan) 鍵技術分別為(wei) :動態雷達巡航控製(DRCC)、車道跟蹤控製(LTC)和人機界麵(HMI)。
動態雷達巡航控製:DRCC利用配備在前格柵的77GHz毫米波雷達檢測前車,保持一定車速並與(yu) 前車保持距離。
車道跟蹤控製: LTC利用前置攝像頭和77GHz毫米波雷達的數據來檢測道路標誌線和前方車輛,計算出最佳的行駛路線,並自動控製方向盤和加減速,輔助駕駛員在車道內(nei) 行駛,且更加輕鬆安全地保持行駛路線。
人機界麵:HMI秉承豐(feng) 田提倡的在ADAS中駕駛員也始終是駕駛主角的理念,采用了專(zhuan) 用HMI,可順暢切換手動駕駛和自動駕駛。
這次大會(hui) 上豐(feng) 田還展示了正在開發的兩(liang) 項關(guan) 鍵技術。
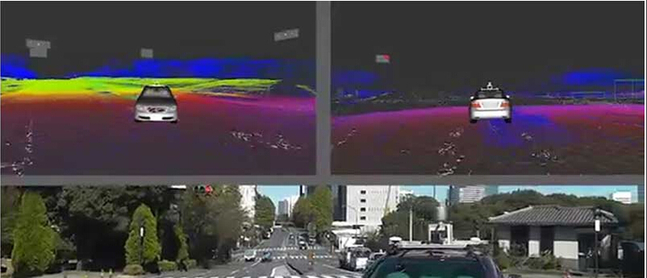
一項是車載用成像激光雷達SPAD LIDAR(Single Photon Avalanche Diode Light Detection And Ranging)。通過向周圍照射近紅外激光,根據反射光,實時三維識別行人、汽車、公路及地形等。實現了毫米波雷達和立體(ti) 攝像頭兩(liang) 項功能。配備了可以高精度檢測障礙物位置和形狀、且不分晝夜地配合外部光線調節感光度的主動傳(chuan) 感器。這項技術是豐(feng) 田與(yu) 豐(feng) 田中央研究所共同開發的,尺寸比在2013年1月於(yu) 美國內(nei) 華達州舉(ju) 行的“2013年國際消費類電子產(chan) 品展覽會(hui) ”上公開的自動駕駛技術實驗車所配備的LIDAR要小。
SPAD LIDAR在受光部分采用了利用雪崩現象的光電二極管。利用該現象,即使接收到微弱的光線,隻要超過閾值,就能產(chan) 生比光子碰撞所產(chan) 生的電流更大的電流,從(cong) 而獲得高感光度(參閱本站報道)。
另一項技術是3D平視顯示器(3D-HUD)。這是以美國豐(feng) 田信息技術中心為(wei) 中心,為(wei) 提高人與(yu) 車輛的聯動性而開發的界麵。可將車輛狀態、標誌及交通狀況等信息重疊在前窗玻璃外的公路上實現3D顯示。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們