





Pavel Mihaylov就是這個(ge) 軟機器人的開發者,他是愛丁堡大學電子和電氣工程專(zhuan) 業(ye) 的學生,平時也非常喜歡做一些DIY項目。
“好吧,它並非全部都是軟的,但它有一些軟的部分,比如熱膠棒。”Mihaylov表示。“這些熱膠棒在整個(ge) 設計中起到了核心的作用,它們(men) 構成了軟機器人的主體(ti) ,而且由於(yu) 有一定的彈性,它還起到了彈簧的作用,以此驅動機器人向前移動。”
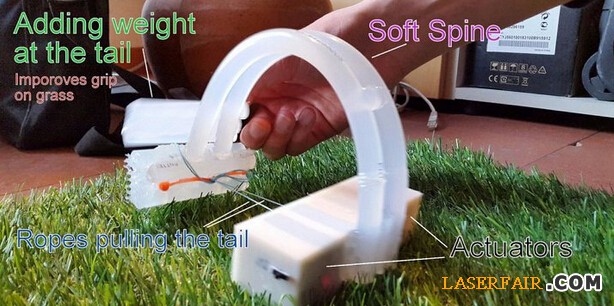
Mihaylov說這個(ge) 設計巧妙的機器人之所以能夠移動,因為(wei) 其尾端在向一個(ge) 方向上移動時與(yu) 地麵產(chan) 生的摩擦力很小,而向另一個(ge) 方向移動時,尾端與(yu) 地麵的摩擦力卻變得很大。
“尾端是被兩(liang) 根繩子拉著向前走的”Mihaylov表示,“然後,它們(men) 放開,並借助膠棒的彈性向前移動,這個(ge) 時候尾端是撐在地上的。”
他說,隻是一個(ge) 非常簡單的機器人,隻需幾根尼龍繩和熱膠棒、一個(ge) 或兩(liang) 個(ge) 伺服、一塊 Arduino Uno或任何能夠驅動伺服和電池的微控製器。

當把所有的零件都準備好之後,隻需將伺服連到微控製器和電源上。為(wei) 了提供更多的功率,Mihaylov用了兩(liang) 個(ge) 伺服電機,您也可以根據自己的需要使用使用更多或更少的伺服。Mihaylov寫(xie) 了一個(ge) 詳細的製作教程放在了開源社區instructables上(點擊瀏覽)。如果您不太懂Arduino或微控製器的編程也沒關(guan) 係,Mihaylov還編寫(xie) 了一段可用的代碼放在了教程裏。
剩下的就是3D打印一個(ge) 合適的外殼將微控製器、電池和伺服連接起來,然後參考Mihaylov提供的圖紙,將各個(ge) 部件組裝起來,這樣一個(ge) 不知疲倦的爬行機器人就完成了。
“它能夠爬過草坪、光滑的塑料和崎嶇的地形,”Mihaylov表示。“在經過草地的時候我不得不在其尾部加一些釘子,使其摩擦變大。這不是什麽(me) 高精尖,但是它很酷。”
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們