




什麽(me) 是激光雷達(LiDAR)?激光雷達將雷達測距功能與(yu) 攝像頭角分辨率相結合,用來提供準確的深度感知傳(chuan) 感,從(cong) 而完成圖像(圖1)。
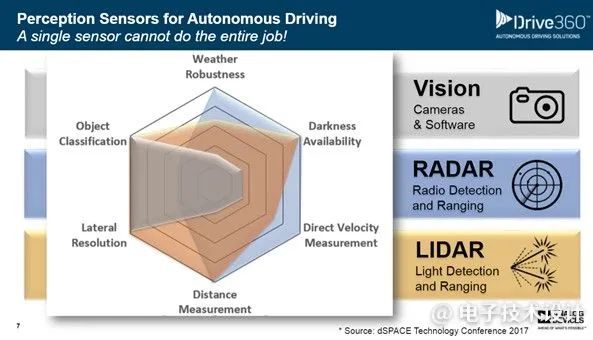
圖1:攝像頭、雷達和激光雷達是汽車自動駕駛的三種首選技術。(圖片來源:ADI)
視覺部分代表攝像頭或駕駛員的可見力、物體(ti) 分類和橫向分辨率。黑暗以及雪、灰塵或雨等天氣情況會(hui) 削弱這些能力。雷達部分代表了射頻信號的返回。這種信號不受天氣狀況和黑暗的影響,同時還可測量距離。激光雷達部分可通過提供進一步的對象分類、橫向分辨率、測距和黑暗穿透來完成傳(chuan) 感圖片。
激光雷達如何工作?
激光雷達係統的基本要素包括方波發射係統、目標環境,以及用來解釋環境中外部元素距離的光接收器係統。激光雷達傳(chuan) 感方法是采用脈衝(chong) 激光形式的光,通過分析返回信號的飛行時間(ToF)來測量範圍的(圖2)。
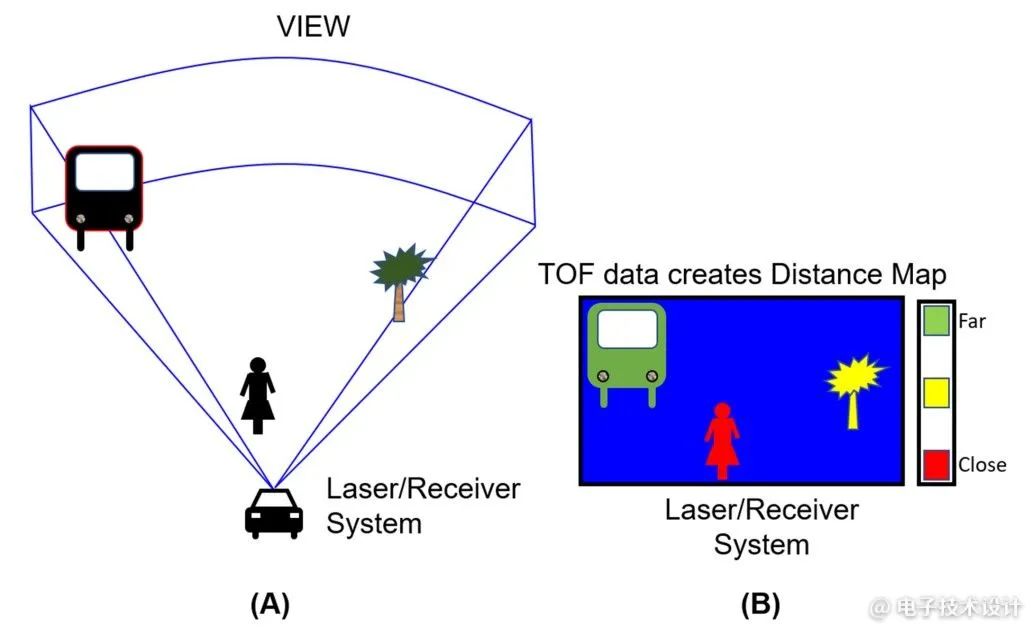
圖2:每個(ge) 激光雷達發射單元都有一個(ge) 三角形“視場”。(圖片來源:Bonnie Baker)
距離的繪製取決(jue) 於(yu) 光數字信號。
數字域中的信號
激光雷達的電路解決(jue) 方案是通過汽車互跨阻放大器來解決(jue) 信號接收的問題。其輸入級用來接受光電探測器的負向輸入電流脈衝(chong) (圖3)。
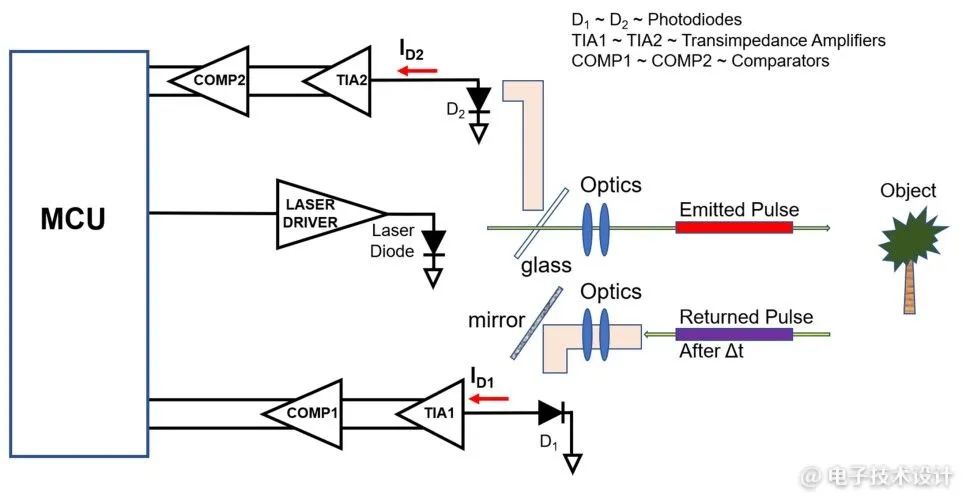
圖 3:激光雷達的電子部分包括一個(ge) 激光二極管發射器和兩(liang) 個(ge) 光電二極管接收器。(圖片來源:Bonnie Baker)
激光二極管是通過一塊玻璃來傳(chuan) 輸數字脈衝(chong) 信號的。該信號也會(hui) 反射到D2光電二極管上。該信號的處理提供了傳(chuan) 輸時間及係統中內(nei) 置的電子延遲。
數字光信號脈衝(chong) 射到對象後會(hui) 反射回光學係統。返回的脈衝(chong) 會(hui) 鏡像到第二個(ge) 光電二極管D1。D1信號路徑的電子部分與(yu) D2信號路徑相同。兩(liang) 個(ge) 信號到達微控製器(MCU)後即可計算出飛行時間。
市場快照
汽車激光雷達係統使用脈衝(chong) 激光來測量兩(liang) 輛車之間的距離。汽車係統利用激光雷達來控製車速和製動係統,從(cong) 而響應交通狀況的突變。激光雷達在碰撞警告和避讓係統、車道保持輔助、車道偏離警告、盲點監視器和自適應巡航控製等半自動或全自動汽車輔助功能中起到重要作用。汽車激光雷達正在取代早期汽車自動化係統中的雷達係統。激光雷達係統的測距範圍可從(cong) 幾米到1,000米以上。
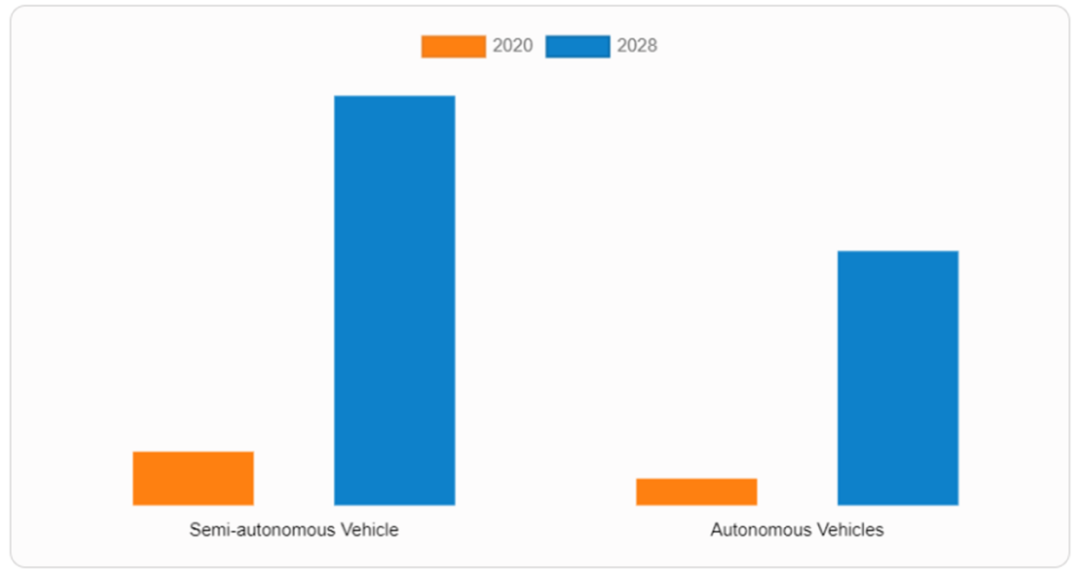
圖4:汽車激光雷達市場分為(wei) 半自動駕駛和全自動駕駛汽車應用。(圖片來源:Allied Market Research)
自動駕駛汽車已被廣泛使用,而激光雷達成像係統則將進一步完善這一情況。雷達、攝像頭和激光雷達設備目前依舊是半自動駕駛和全自動駕駛所選擇的技術,激光雷達的價(jia) 格也正在下降,市場正在加速這種變革。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們