




機器人主要由機器人本體(ti) 、驅動係統和控製係統所構成。機器人本體(ti) 由機座、立柱、大臂、小臂、腕部和手部組成, 用轉動或移動關(guan) 節串聯起來, 激光加工工作頭安裝在其手部終端, 像人手一樣在工作空間內(nei) 執行多種作業(ye) 。加工頭的位置一般是前3個(ge) 手臂自由度確定, 而其姿態則與(yu) 後3 個(ge) 腕部自由度有關(guan) 。按前3 個(ge) 自由度布置的不同工作空間, 機器人可有直角坐標型、圓柱坐標型、球坐標型及擬人臂關(guan) 節坐標型4 種不同結構。根據需要, 機器人本體(ti) 的機座可安裝在移動機構上以增加機器人的工作空間。
機器人驅動係統大多采用直流伺服電機、步進電機和交流伺服電機等電力驅動, 也有的采用油缸液壓驅動和氣缸氣壓驅動, 借助齒輪、連杆、齒形帶、滾珠絲(si) 杠、諧波減速器、鋼絲(si) 繩等部件驅動各主動關(guan) 節實現六自由度運動。機器人控製係統是機器人的大腦和心髒, 決(jue) 定機器人性能水平。主要作用是控製機器人終端運動的離散點位和連續路徑。
在選用激光加工機器人時, 主要要考慮以下幾個(ge) 性能參數:
1) 負載能力: 在保證機器人正常工作精度條件下, 機器人能夠承載的額定負荷重量。激光加工頭重量一般比較輕, 約10 ~ 50 kg , 選型時可用1 ~2 倍。
2) 精度: 機器人達到指定點的精確度, 它與(yu) 驅動器的分辨率有關(guan) 。一般機器人都具有0. 002 mm的精度, 足夠激光加工用。
3) 重複精度: 機器人多次到達一個(ge) 固定點, 引起的重複誤差。根據用途不同, 機器人重複精度有很大不同: 0. 02~ 0. 6mm。激光切割精度要求高可選0. 01 mm, 激光熔覆精度要求低可選0. 1 ~0. 3 mm。
4) 最大運動範圍: 機器人在其工作區域內(nei) 可以達到的最大距離。具體(ti) 大小可以根據激光加工作業(ye) 要求而定。
5) 自由度: 用於(yu) 激光加工的機器人一般至少具有六自由度。
圖1是FANUC公司R-2000iB 係列6 軸機器人構成外形圖, 6 個(ge) 關(guan) 節均為(wei) 旋轉關(guan) 節, 6 個(ge) 坐標軸對應6 個(ge) 旋轉關(guan) 節。
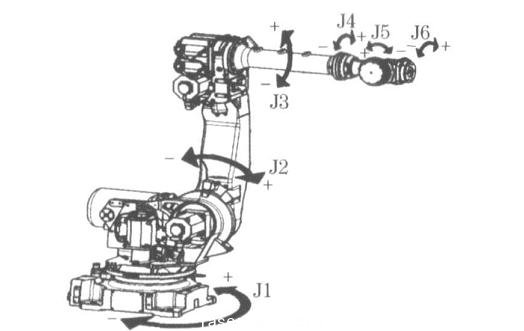
圖1 FANUC R-2000iB 係列6 軸機器人
圖2為(wei) FANUC公司R-2000iB 係列6 軸機器人的部分主要參數及其最大運動範圍。除此之外, 機器人還有其他一些指標, 在選型時也需要考慮。如: 手腕部( J4 軸, J5 軸, J6 軸) 允許最大扭矩; 手腕部( J4 軸, J5 軸, J6 軸) 允許最大慣量;最大動作速度( J1 軸, J2 軸, J3 軸, 4 軸, 5 軸, 6 軸) ;最大動作範圍( J1 軸, 2 軸, 3 軸, 4 軸, 5 軸, 6 軸) 等。
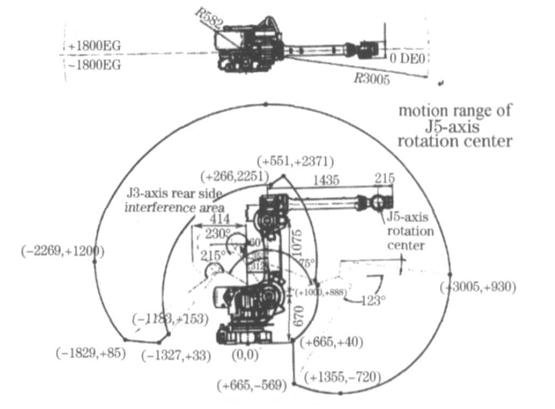
圖2 FANUC 機器人最大運動範圍
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們