




了解激光雷達行業(ye) 的人,會(hui) 清楚300線分辨率的意義(yi) 。
激光雷達(LiDAR ,Light Detection And Ranging)的工作原理是向目標發射探測信號,然後將從(cong) 目標反射回來的信號與(yu) 發射信號進行比較,處理後就可獲得目標距離、方位、高度;如果在短時間內(nei) 可以測得很多點距離信息,可進一步得到目標速度、姿態甚至形狀等參數。
可以說,激光雷達傳(chuan) 感器是自動駕駛汽車的核心部件之一。
傳(chuan) 統的激光雷達可以按照激光線束分為(wei) 1線、4線、8線、16 線、32線或64線等,多個(ge) 激光線束在豎直方向沿不同角度發出,經水平方向掃描實現對目標區域三維輪廓探測。
激光線束越多,分辨率就越高,激光點雲(yun) 密度就越大。因此,增加掃描線的數量,保證探測距離,壓縮尺寸,降低重量,是目前激光雷達的一個(ge) 技術發展方向。
目前國際知名的激光雷達傳(chuan) 感器廠商主要有Velodyne、Ibeo和Quanergy等。
今年11月,Velodyne宣布推出128線激光雷達,據稱是目前前市場上所有LiDAR係統中分辨率最高、探測距離最遠、視場角最寬廣的LiDAR傳(chuan) 感器。
而僅(jin) 僅(jin) 一個(ge) 月之後,Innovusion就公布了分辨率更高的產(chan) 品。
作為(wei) 主傳(chuan) 感器要達到圖像級水平
為(wei) 什麽(me) 是300線?
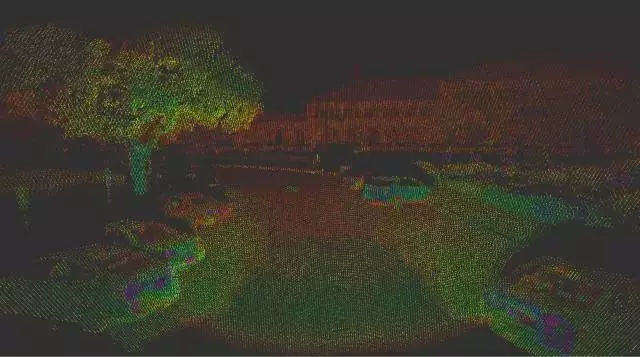
鮑君威解釋道,高分辨率對於(yu) 可靠的目標檢測是必不可少的,300線才構成一幅圖像。他展示了一張點雲(yun) 圖來分析激光雷達的高分辨率對於(yu) 行車安全的重要性。
上麵這張行人過馬路的點雲(yun) 圖,圖中點越多,意味著激光線越多,分辨率越高。
“線和線之間是沒有信號的,你看不到東(dong) 西。假如路上有個(ge) 磚頭,或者線與(yu) 線的距離越來越大你看到的東(dong) 西就漏掉了,那就是事故。”鮑君威解釋說。“如果一個(ge) 點有1%的概率看不到,在各個(ge) 點漏掉概率獨立的條件下3個(ge) 點都看不到的概率就是百萬(wan) 分之一。這個(ge) 誤差很高,相當於(yu) 100萬(wan) 個(ge) 場景,會(hui) 有一個(ge) 場景把小孩漏掉,那就是一個(ge) 死亡場景。”
所以,他希望做激光雷達能夠有很多的線束,達到很高的分辨率,對應更多的點,從(cong) 而形成圖像。

做成圖像級,鮑君威認為(wei) 這也正是Innovusion跟其他激光雷達公司不同之處,“橫向和縱向的分辨率是一樣的,沒有一根根線的概念了。這是我們(men) 用精密儀(yi) 器設計方法做的光學係統做出來的。”
在探測距離上,鮑君威認為(wei) ,自動駕駛的激光雷達如果作為(wei) 主傳(chuan) 感器,一定要能看得比較遠,至少150米。
他解釋說,在高速公路上開車,時速100公裏的情況下需要105米的刹車距離,這樣的話,人才有足夠的時間來判斷前方是什麽(me) 東(dong) 西,然後刹車。
激光雷達要能作為(wei) 自動駕駛車輛上的主傳(chuan) 感器使用,他給出了核心的技術指標:第一,一定要能看到150米以外;第二,要人能看到人形,車能看到車形,那就要有足夠的點,足夠的線。

Innovusion的產(chan) 品還實現了是激光雷達傳(chuan) 感器和攝像頭數據的融合,因此可以看到真正的物體(ti) 顏色。“激光雷達本身沒有顏色,判斷不出來紅綠燈,但是跟攝像頭結合在一起,數據融合好的話,首先通過三維定位可以看出這是一個(ge) 紅綠燈的輪廓。”
簡單地說,激光雷達有反射率、分辨率、距離、價(jia) 錢、成本等幾個(ge) 核心指標。300線分辨率,而且針對10%反射率的物體(ti) 檢測達到150米以上,目前Innovusion已經做到了。
激光雷達價(jia) 格非常昂貴,穀歌在其最早原型汽車中所使用的激光雷達傳(chuan) 感器售價(jia) 高達7萬(wan) 美元。不過,鮑君威稱,在汽車行業(ye) 量產(chan) 的定義(yi) 下,產(chan) 品一年如果出貨10萬(wan) 套,他有信心可以做到一套價(jia) 格控製在一兩(liang) 千美元。
做出滿足車規的產(chan) 品,他給出的時間表是兩(liang) 到三年。
目前,Innovusion已經公布的第一版原型產(chan) 品,寬5、6寸,高4寸,厚大概是3、4寸。尺寸小巧,甚至可以放到擋風玻璃上麵。鮑君威希望到時在量產(chan) 車上用的激光雷達傳(chuan) 感器做成相機的形式,可以很方便放在車上多個(ge) 地方。
現在無人駕駛的核心難點,鮑君威認為(wei) 有兩(liang) 個(ge) 層次,一是感知,一是決(jue) 策和執行,執行是一級供應商的強項,而感知的核心難點是怎麽(me) 把它可靠、經濟、高效地做出來。他認為(wei) ,軟件、硬件,計算、傳(chuan) 感器都是互補的,硬件的傳(chuan) 感器做得很好的話,現有的算法就可以滿足很大一部分場景的可靠性需求。
根據他的總結,無人駕駛目前的核心問題是90%的東(dong) 西在感知,感知很大一部分挑戰可以由傳(chuan) 感器解決(jue) 。
並非第一次創業(ye)
Innovusion成立之初就獲得了高榕資本和汽車圈投資人參投的幾百萬(wan) 美元天使輪。現在,A輪融資也已經開始。
鮑君威2014年加入百度美國研發中心,負責開發大規模數據中心硬件加速及高性能網絡。2015年底加入百度自動駕駛事業(ye) 部,負責車載計算係統及傳(chuan) 感器團隊,集成自動駕駛係統所需的各類傳(chuan) 感器,並建立團隊來深度評測及調研各項新型傳(chuan) 感器技術。
正是在百度的這段工作經曆讓他看到了市場對於(yu) 傳(chuan) 感器的真實需求。

百度在2016年8月聯合福特公司對激光雷達公司Velodyne進行了1.5億(yi) 美元的共同投資。當時投資Velodyne的項目正是由鮑君威負責技術調研。
鮑君威認為(wei) 智能駕駛軟件很重要的,但硬件傳(chuan) 感器同樣重要。
2016年11月,他離開百度,創立了Innovusion,開發應用於(yu) 自動駕駛及其它行業(ye) 的激光雷達產(chan) 品及傳(chuan) 感器融合技術。
但Innovusion並非鮑君威第一次創業(ye) 。
他在光學精密測量儀(yi) 器及傳(chuan) 感器領域有近20年工作和研發經驗,進入百度之前在光學測量機構有大約15年的工作經曆。
鮑君威本科畢業(ye) 於(yu) 北京大學物理係,在加州大學柏克萊分校獲電子工程碩士及博士學位。在博士期間和兩(liang) 位師兄共同開發了可稱之為(wei) “顯微光學雷達”的Scatterometry技術,1999年創立Timbre Technologies, Inc.。
第一次創業(ye) 的公司在2001年被日本半導體(ti) 設備公司Tokyo Electron並購,鮑君威在隨後的十幾年裏帶領Tokyo Electron在矽穀的光學測量部門將Scatterometry從(cong) 原理模型變成可實際應用的精密測量設備,引領了Scatterometry技術及其它精密光學傳(chuan) 感器在先進半導體(ti) 生產(chan) 製程中的廣泛應用。
目前,Innovusion團隊有幾十人,與(yu) 矽穀多數高科技公司類似,其中很多人為(wei) 華人背景。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們