




時至今日,機器人已經成我們(men) 日常生活的重要參與(yu) 者,從(cong) 商場到超市,從(cong) 酒店到家中,機器人產(chan) 品已隨處可見。
麵對各式各樣的機器人產(chan) 品,不知你是否也會(hui) 有和我一樣的疑問——機器人是如何做到精準導航定位的?激光導航與(yu) 視覺導航又有何卻別?今天,我們(men) 就深入了解一番。
首先大家要明確一個(ge) 概念——同時定位與(yu) 地圖構建(簡稱SLAM),通常是指在機器人上,通過對各種傳(chuan) 感器數據進行采集和計算,生成其自身位置姿態的定位和場景地圖信息的係統。SLAM對於(yu) 機器人或其他智能體(ti) 的行動和交互能力至為(wei) 關(guan) 鍵,因為(wei) 它代表了自主移動的基礎:知道自己在哪裏,知道周圍環境如何,進而知道下一步該如何自主行動。
一般來講,機器人導航定位係統是為(wei) 以SLAM為(wei) 核心,融合路徑規劃和運動控製的一整套方案。按照核心功能模塊來區分,目前常見的機器人導航方案一般具有兩(liang) 種形式:激光導航和視覺導航。
丨激光導航
激光導航脫胎於(yu) 早期的基於(yu) 測距的定位方法(如超聲和紅外單點測距)。激光雷達(Light Detection And Ranging)的出現和普及使得測量更快更準,信息更豐(feng) 富。激光雷達采集到的物體(ti) 信息呈現出一係列分散的、具有準確角度和距離信息的點,被稱為(wei) 點雲(yun) 。通常,激光導航係統通過對不同時刻兩(liang) 片點雲(yun) 的匹配與(yu) 比對,計算激光雷達相對運動的距離和姿態的改變,也就完成了對機器人自身的定位。
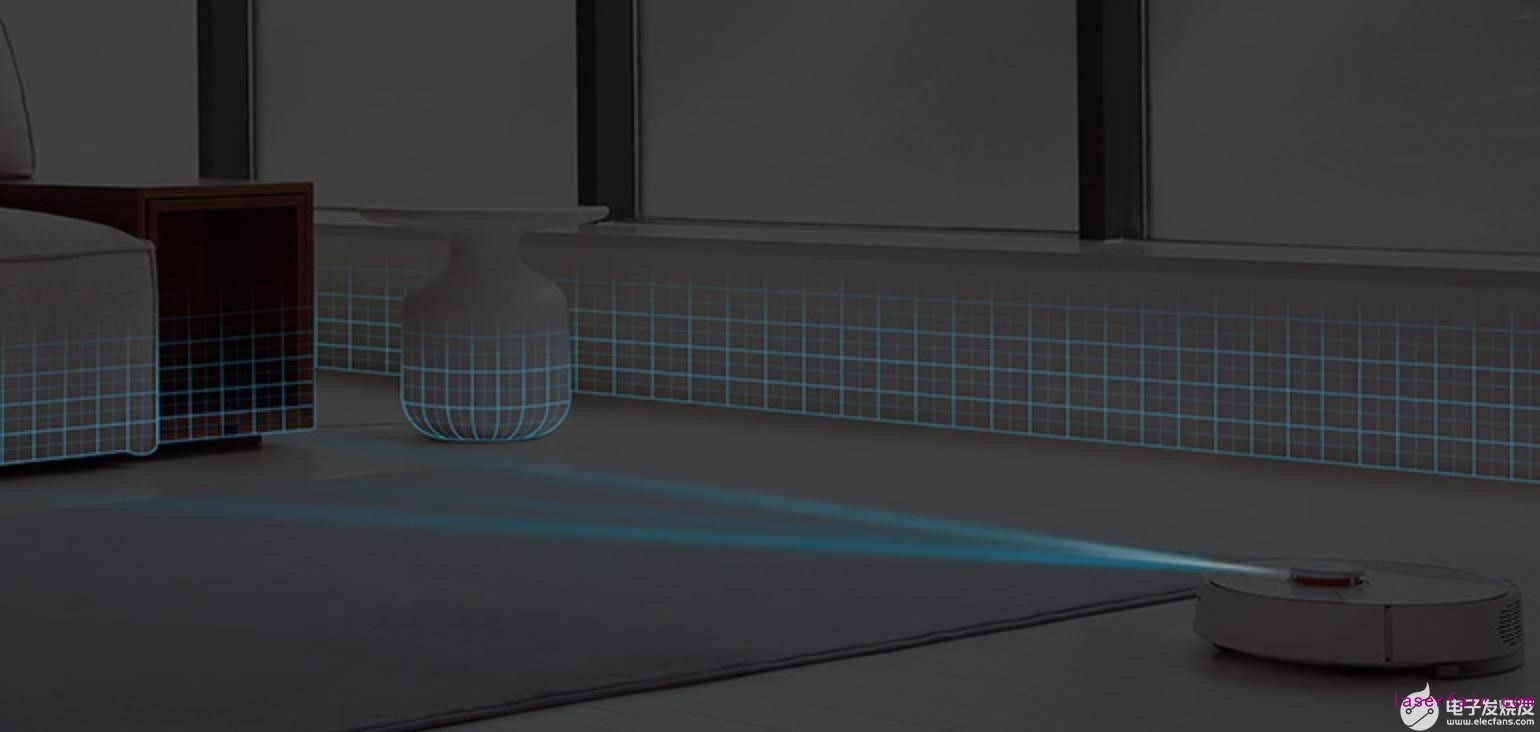
激光雷達距離測量比較準確,誤差模型簡單,點雲(yun) 的處理也比較容易。同時,點雲(yun) 信息本身包含直接的幾何關(guan) 係,使得機器人的路徑規劃和導航變得直觀。激光導航理論研究也相對成熟,落地產(chan) 品更豐(feng) 富。但這種技術也有其無法忽略的問題——成本高、係統可靠一般。
無論是應用於(yu) 掃地機器人的低端雷達抑或應用於(yu) 商業(ye) 服務機器人的高端雷達,激光雷達的成本已經是機器人廠商成本的重要支出。此外,由於(yu) 激光雷達受限於(yu) 單一的信息采集模式,遇到走廊等相似場景容易出現“假回環”,易發生位置丟(diu) 失,並且在異常位置、開機重啟等情況下,激光雷達也很難進行快速準確的重定位。因此,在酒店、室外等場景中,采用激光雷達導航的機器人時常發生導航定位錯誤。
丨視覺導航
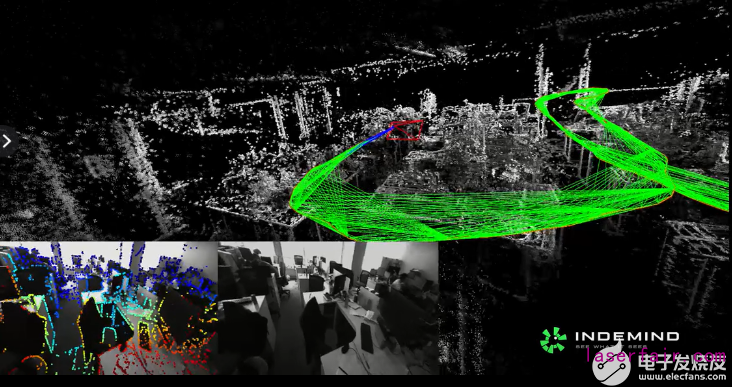
眼睛是人類獲取外界信息的主要來源,視覺導航也具有類似特點,它可以從(cong) 環境中獲取海量的、富於(yu) 冗餘(yu) 的紋理信息,擁有超強的場景辨識能力,且相對於(yu) 成本較高的激光雷達,視覺傳(chuan) 感器在成本控製上有著天然優(you) 勢。
由於(yu) 工作原理的不同,雖然視覺SLAM成本較低,但其本身需要較強的計算資源,對算法要求也較高,同時視覺SLAM的原理也隻是盡可能接近物理探測,因此在精度上略有不足。所以在具體(ti) 應用中,需要因地製宜,結合實際場景實用。
例如,在以掃地機為(wei) 代表的小型機器人底盤上,視覺導航方案是一種替代性的方案,可以取代現有的激光雷達方案,以更低的成本實現建圖、導航、避障甚至回充等功能,並且智能化程度更高,具有很強的交互潛力。但在以安全為(wei) 前提的服務機器人上,視覺導航更合理的使用方式是與(yu) 現有激光、裏程計等多傳(chuan) 感器融合,解決(jue) 假回環、重定位、深度測量等問題,進一步提高機器人的魯棒性,滿足更為(wei) 嚴(yan) 苛的使用需求。
當然,市場中也有個(ge) 別視覺導航係統精度十分優(you) 秀,如我們(men) 耳熟能詳的iRobot。這家公司的掃地機器人產(chan) 品多數搭載的自研視覺SLAM導航定位係統,其定位精度、導航穩定性十分被市場認可。無獨有偶,國內(nei) 立體(ti) 視覺方案提供商INDEMIND,所推出的機器人視覺導航定位解決(jue) 方案也十分值得稱道,該方案的可實現絕對定位精度<1%,姿態精度<1°的導航定位效果,同時還支持路徑規劃、智能避障、障礙物識別等功能。
總的來說,與(yu) 激光雷達方案相比,視覺導航是一個(ge) 維度更高、成本更低、適用性更強的機器人導航定位方案,未來,隨著算力的提升,算力成本的降低,視覺導航方案的成本可以進一步下探;伴隨研究的深入,視覺導航所帶來的環境語義(yi) 功能日趨完善,具有更高維度交互潛力的智能視覺機器人無疑在麵臨(lin) 下一輪競爭(zheng) 時更具優(you) 勢,因此,可以預見視覺導航方案廣闊的發展前景,視覺導航也必將成為(wei) 機器人導航領域的主流。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們