




4 插補算法的設計(Design of the interpolationalgorithm)
用並聯機器人進行激光加工主要是控製激光焦點的運動,並保持激光處於(yu) 工件當前加工點的法線方向.並聯機器人是由複雜的空間機構組成的,激光光軸位姿參數與(yu) 控製係統驅動坐標位置之間需要經過坐標變換,從(cong) 而獲得控製所需的幾何描述.因此,並聯機器人的插補方式與(yu) 傳(chuan) 統數控也有所不同.
本係統插補計算將機構末端的運動軌跡離散為(wei) 一係列首尾相接的小線段:給定一個(ge) 插補周期(作為(wei) 係統參數,用戶可設定),按照指令中給出的軌跡進給速度,單獨計算各軸方向上的位移增量,將連續的軌跡離散為(wei) 若幹離散點序列,然後應用S型加減速算法,對插補步長進行修正.利用反解模塊將插補生成的離散點映射到關(guan) 節空間,係統根據反解模塊計算結果驅動伺服電機運動.
5 激光工藝模塊設計及實現(Design and realizationof the laser processing module)
並聯激光加工數控係統還要包括激光工藝模塊,該模塊用於(yu) 設置和調整激光加工工藝參數,包括激光功率控製、離焦量控製、偏距控製、激光器狀態等參數,如圖5 所示.
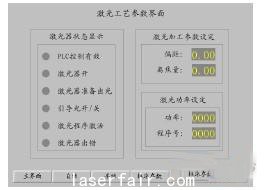
圖5 激光加工參數界麵
激光功率設定參數是通過軸控製板發送給激光器的,激光器將此參數作為(wei) 輸出功率曲線的幅值.離焦量是指焦平麵與(yu) 被焊工件上表麵的距離,這裏將離焦量作為(wei) 激光焦點和第5軸旋轉中心距離的修正參數,傳(chuan) 遞給正反解模塊.光束中心偏離加工軌跡的距離叫偏距,偏距設置用於(yu) XY 、YZ、ZX平麵加工.這裏規定光束中心在加工軌跡右側(ce) 偏距為(wei) 正值,左側(ce) 為(wei) 負值.
6 實驗與(yu) 結論(Experiment and conclusion)
使用便攜式三坐標測量機對並聯機器人末端精度進行檢測.並聯機器人末端由(0;400;0;0;0) 沿直線運動到(1000;400;0;0;0),測出誤差如圖6 所示(圖中橫坐標為(wei) X 軸位置坐標,縱坐標依次為(wei) X、Y 、Z軸位置誤差和單位激光光軸矢量在X軸的投影I、在Y 軸的投影J、在Z 軸的投影K 的差).
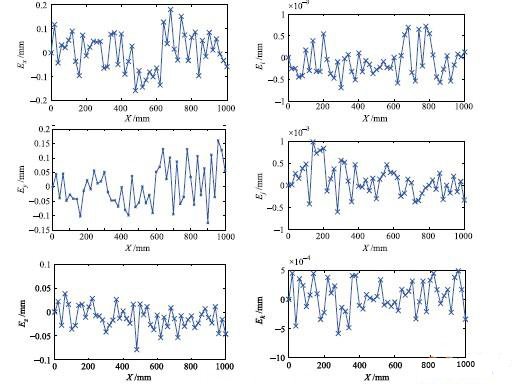
圖6 並聯機器人位姿誤差曲線
並聯機器人具有機械結構簡單、控製係統複雜的特點,需要根據不同的結構形式設計不同的控製係統.本係統的開放式設計可提高開發效率,降低開發成本,使並聯數控係統的開發、維護和推廣變得更加容易.實驗證明本文開發的基於(yu) RTLinux 的五自由度並聯激光焊接數控係統性能達到了激光焊接的實際應用要求.
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們