




一、直角坐標機器人介紹
德國公司是世界上最著名的機器人供應商之一,生產(chan) 多種規格的直線導軌、步進電機、交流伺服電機、直線電機和多軸數控係統。以此為(wei) 基礎,在短時間內(nei) 可提供各種規格的線性導軌、二維、三維標準機器人及用戶專(zhuan) 用機器人和生產(chan) 線。這些機器人可以裝備焊槍、通用手爪或專(zhuan) 用工具,完成焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷(shang) 、分類、裝配、貼標、噴碼、打碼、(軟仿型)噴塗等一係列工作。由於(yu) 百格拉的導軌、驅動電機,、減速機和控製係統等所有部件全部自己生產(chan) ,使得機器人整體(ti) 性能更加優(you) 異。十多年來出廠的機器人和生產(chan) 線全部在正常工作,深受包裝機械、印刷機械、機械電子、汽車、食品、藥品和化妝品生產(chan) 等行業(ye) 新老用戶的厚愛。
百格拉公司的120多名專(zhuan) 家及工程技術人員成功開發生產(chan) 了各種規格的線性導軌,並在此基礎上與(yu) 用戶密切合作開發通用及專(zhuan) 用機器人,已為(wei) 許多廠家提供了數千台各種專(zhuan) 用機器人及生產(chan) 線。其中一個(ge) 應用領域是工件無損探傷(shang) 。
在直角坐標機器人中各個(ge) 軸主要是做直線運動,而且運動方向通常是相互垂直的,所以叫直角坐標機器人。直角坐標機器人可分為(wei) 一維到多維很多種,每一維是一個(ge) 運動軸,由一個(ge) 直線運動單元組成。一台噴塗用三維直角坐標機器人由三個(ge) 直線運動單元組成,而一台碼垛機器人根據應用要求通常由幾個(ge) 一維,二維和三維直角坐標機器人組合而成。百格拉公司直角坐標機器人的主要技術數據是運動行程0到18米;負載1~180公斤;重複定位精度0.05mm;每個(ge) 軸運動速度最高可達5米/秒。
二、應用舉(ju) 例
1、BERGER LAHR機器人在工件定位中應用方案

1) 機器人型號及設備
X軸行程;4000mm;Y軸行程:2500mm;Z軸行程:2mm
在Z軸上安裝CCD相機,對位置進行測量。
2)電氣結構
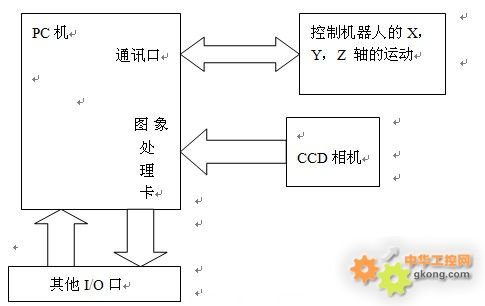
⑴在機器人的運動過程中,PC機可實時顯示X、Y、Z軸的當前坐標值,可對三個(ge) 軸的當前位置實時監視;
⑵PC機通過圖象處理卡把CCD相機攝下的照片進行處理,得到位置參數,對X、Y軸誤差進行補償(chang) ,從(cong) 而達到精確定位的目的。
3 )CCD相機的參數:
視場範圍:10mm×10mm
分辨率:256×256像素;
像素點尺寸:10/256≈0.039mm
中心坐標:(128,128)
4)工作過程:
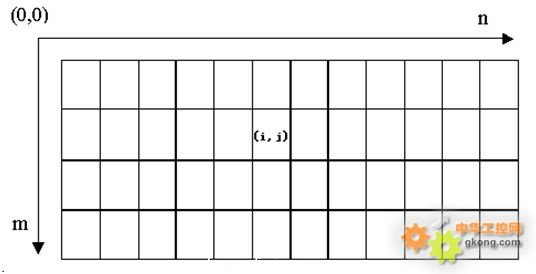
如有n×m個(ge) 工件(X軸方向有n個(ge) ,y方向上有m個(ge) ),每個(ge) 工件的尺寸為(wei) L×H(單位:mm)
⑴ 位置計算
當定位(i,j)個(ge) 工件時,機器人定位到坐標[L(i-1)+L/2 ,H(j-1)+H/2]
同時CCD相機攝取圖象,把記錄下的位置圖象傳(chuan) 送到計算機進行數據處理,經過二值化,求出工件實際原點得到當前工件中心位置的像素點坐標(X0,Y0)
注: 0<X0<256 0<Y0<256
⑵計算誤差,準確定位
因為(wei) 定位係統存在誤差,在行程範圍內(nei) X、Y軸的最大誤差接近±1mm,所以要對誤差進行計算,並對其補償(chang) ,從(cong) 而達到準確定位的目的。
則X、Y軸的誤差ΔX、ΔY
ΔX = (X0-128) ×0.039
ΔY = (Y0-128) ×0.039
注:0.039為(wei) 像素點尺寸
PC機驅動電機再走ΔX、ΔY,即完成準確定位。
⑶然後即可對工件進行測量工作。
2、 BERGER LAHR機器人在超聲波掃描儀(yi) 中應用
1)任務:航天飛船的儀(yi) 表板無損掃描
(1) 機器人型號及設備
◆ PR 6/3 , 5400mmx5400mmx400mm
◆ 在Z軸上裝配掃描頭,對儀(yi) 表板進行掃描
◆ 使用百格拉高級伺服控製係統TLC612,TLC411實現定位控製
(2) 任務要求:整個(ge) 過程需要機器人的動作保持
高重複性,低振動,並且在Z軸導軌上,安裝可旋轉軸,從(cong) 而增加了掃描的範圍,可以完成多方位的掃描任務。
轉載請注明出處。

 相關文章
相關文章
 熱門資訊
熱門資訊
 精彩導讀
精彩導讀



















 關注我們
關注我們